

НИРС Андреев / 140600.68_СДМ.В.2.1_Инжиниринг электроприводов и систем автоматизации.ч3
.pdfРис 12.10 Компьютерная модель системы управления, реализованная в Simulink MATLAB в соответствии с математической моделью
Функциональные зависимости f1(.)…f5(.) |
вводились |
отдельными |
программами, написанными в среде MATLAB. |
Молель |
может быть |
расширена, если необходимо выполнить исследование динамических нагрузок (упругих моментов) любых выбранных элементов механической части электропривода. С использованием разработанной модели можно исследовать:

Рис. 6.18. Переходный процесс по скорости:
1- заданная скорость кривошипного вала; 2 - результат отработки задания по скорости
Рис. 6.19. Переходный процесс по углу резания
Рис. 6.20. Переходный процесс по моменту
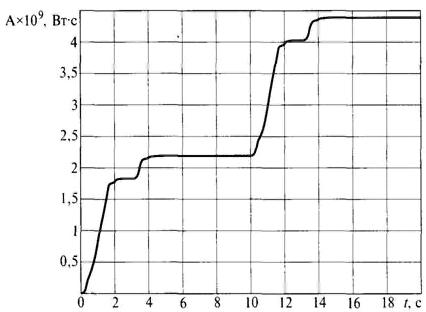
Рис. 6.21. Переходный проиесс энергии, затрачиваемой на резание
Заданные диаграммы движений ножниц; динамические нагрузки, возникающие в суммирующей шестерне редукто-
ра при отличии друг от друга динамических характеристиках замкнутых контуров регулирования моментов двух приводов;
динамические процессы в системе и ножницах при воспроизводстве заданных движений;
энергетические характеристики привода в виде изменений отдельных составляющих мощности, суммарной мощности и энергии в процессе реза листового проката разного сортамента;
кинематику, динамику и энергию ножниц, задав произвольною вида функциональные зависимости f1(.)…f4(.).
Результаты исследования динамических характеристик представлены на рис. 6.18...6.20. а энергетических — на рис. 6.21.
Лекция 13. МОДЕЛИРОВАНИЕ И ИССЛЕДОВАНИЕ АВАРИЙНЫХ СИТУАЦИЙ
2. Моделирование и исследование аварийных ситуаций
Литература: Учебное пособие, часть 3, :стр 327-331
1.Моделирование и исследование аварийных ситуаций
Аварийные ситуации в технологическом процессе могут возникать на трех уровнях:
При включении (запуске) оборудования в технологическую цепочку. На этом уровне производится самотестирование систем оборудования (в основном это проверка цепей питания и соответствующих напряжений и токов, а в ряде случаев — выявление неисправных ячеек памяти); при пусковых режимах. На этом уровне кроме проверки соответствующих
напряжений и токов контролируются и технологические параметры (например, заправочная скорость бумаги или другого материала и т.д.);
При рабочем функционировании технологического оборудования. На этом уровне кроме проверки соответствующих напряжений и токов контролируются и технологические параметры обрабатываемого материала (толщина, натяжение, размер петли, прогиба и т.д.), а также ситуации, связанные с нарушением технологического процесса (например, заклиниванием механизмов нажимного устройства прокатного стана, возникающим при нарушении синхронизации движений нажимных винтов, или остановкой вращения вала двигателя, возникающей при завале камнями бункера дробильного агрегата и т.п.).
При моделировании аварийных ситуаций первого уровня в компьютерные модели вводят специальный логический блок, который при отклонении какого-либо параметра (или параметров) от условий нормальной эксплуатации, выдаст сообщение либо о наступлении аварийной ситуации, либо о соответствующих отклонениях параметров. В этом случае возможны прекращение исследования и продолжение исследования, но с новыми параметрами (в реальных системах управления срабатывают требуемые защиты и блокировки). Формирование соответствующих сообщений выполняется с использованием алгоритмов логического управления. Реализация любого из этих алгоритмов основана на использовании операций сравнения (>, >=, <, <= и др.), типовых логических операций (AND. OR. NOT. XOR. NXOR) и других логических преобразований. Для этих целей можно применить раздел Logical Operator Math MATLAB (рис. 13.1).
Кроме того, для выяапения отклонений параметров технического объекта на входе исследуемой модели формируются тестовые (испытательные) сигналы [8]. Обычно в качестве детерминированных моделей сигналов используются следующие математические представления: S — импульс; функция включения (скачок) a(t) = 1(t); треугольный импульс;

последовательность прямоугольных импульсов; гармонические функции sinωt и cosωt, экспоненциальная функция ехр(αt) и др. Для этих целей возможно применение стандартных S-функний раздела Sources Matlab.
В основе моделирования аварийных ситуаций второго и третьего уровней лежит формирование определенных управляющих воздействий:
ступенчатых y3(t) = у30 при t < 0 и у3(t) = y’30 при t > 0;
Рис 13.1 Раздел Logical Operator Math MATLAB
линейных y3(t) = у30t при t= 0...t0 , у3(t)=у’’30 при t > t0;
гармонических y3(t) = у30 + у’30 sinωi t. у3(t) = у30+ у’30 cosωi t. траекторных y3(t), которые задаются в виде таблицы переменных с
использованием линейной интерполяции, а также следующих возмущающих воздействий:
ступенчатых f(t)=f0„ при t< 0 f(t)=f’o при t>0; гармонических f(t) =fo + f’o sin ωi t. f(t) =fo +fo cos ωi t;
волновых f(t) = с0 +  ck sin ωk t + c’k cos ωk t);
ck sin ωk t + c’k cos ωk t);
случайных.
Здесь частоты ωk — преимущественный спектральный состав возмущений, а изменяющиеся случайным образом коэффициенты co ,ck ,с’k отражают меру неопределенности в описании этих возмущений.
При этом задают граничные значения управляющих или возмущающих воздействий или значения, превышающие граничные. Например, для осуществления процесса непрерывной прокатки без натяжения необходимо чтобы длина петли удовлетворяла допустимым значениям: l1min ≤ l1max.
Таким образом, формируя, например, на входе компьютерной модели про-
катного стана различные входные воздействия, по соотношению скоростей клетей можно определить возможный диапазон изменения скоростного режима прокатки, а также соотношения скоростей, при которых может произойти разрыв металла или возникновение разнотолшинности по длине проката.
Аналогичные результаты можно получить и в бумагоили картоноделательных машинах, кордных линиях и т.д.
Исходя из сказанного можно отмстить, что возникновение аварийных режимов, связанных с отклонением от технологии производства продукции, в основном обуслоазено отклонениями скоростных режимов ИЛИ возникновением перегрузок электродвигателя, т.е. уменьшением (увеличением) момента на его валу.
Других отличий методики моделирования и проведения исследований на компьютерных моделях от рабочего функционирования нет.
Для моделирования аварийных режимов можно также применить пакет событийного моделирования Staleflow, являющегося специальным расширением Simulink MATLAB. При этом функционирование системы представляется на основе последовательности правил, которые определяют соответствие событий и действий, выполняемых в ответ на эти события. Данный пакет можно использовать для проектирования и моделирования детерминированных систем управления, диспетчерской службы городского транспорта и др.
Пакет Siateflow имеет свой графический интерфейс пользователя, позволяющий создавать модели в виде SF-диафамм динамического типа. В процессе моделирования на SF-диаграммс отражаются все изменения модели. При этом динамическое изменение параметров модели представляется в виде измене-ния цвета модулей математической модели в зависимости от их состояния, построения диаграмм переходов и др.

Рис. 13.2. SF-Модель и SF-диаграмма для исследования работы секции бумагоделательной машины.
Исходные данные для предварительных расчетов и исследования аварийного режима см. в лекции 11.
На рис. 13.2 представлены SF-МОДель и SF-диаграмма исследования работы секции бумагоделательной машины.

Рис. 13.3. Переходные процессы и |
Рис. 13.4. Характеристика натяжения |
электроприводах ло и после обрыва |
бумажною полотна при обрыве |
бумажного полотна |
|
На рис. 13.3 представлены переходные процессы, происходящие до и после обрыва бумажного полотна (tобр = 0,1 с). Обрыв бумажного полотна произошел при увеличении скорости второго электропривода по отношению к первому на 5 %, что автоматически вызвало увеличение силы натяжения бумажного полотна до критического значения. Характеристика натяжения бумажного полотна при обрыве показана на рис. 13.4. В этом случае до остановки секции бумагоделательной машины электроприводы работают в режиме холостого хода.
Лекция 14. КОМПЬЮТЕРНЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ ДВИЖЕНИЙ МЕХАНИЗМОВ
2. Компьютерные методы исследования с визуализацией движения механизмов обработки вещества (материала).
Литература: Учебное пособие, часть 3,: стр 331-334.
1. Компьютерные методы исследования с визуализацией движения механизмов обработки вещества (материала).
Чаше всего для отображения результатов исследования ЭК используются различные графические зависимости (частотные характеристики, корневые показатели, переходные характеристики и т.д.). которые не отражают наглядно суть процесса, происходящего в объекте, а
позволяют судить о работоспособности системы только по косвенным признакам, таким как устойчивость, колебательность, чувствительность, время переходного процесса и т.п.
Эффективность проектирования повышается, если при исследовании применяется визуализация динамических процессов в ЭК.
Независимо от разбиения конкретной автоматизированной системы управления на подсистемы для каждой из них выполняется внешнее и внутреннее проектирование (макро- и микропроектирование). На стадии макропроектирования разрабатывается обобщенная модель процесса функционирования, позволяющая разработчику получить ответы на вопросы об эффективности различных алгоритмов управления объектом при его взаимодействии с внешней средой.
Для работы на этапе макропросктирования программная система должна иметь библиотеку модулей, отражающих конфигурацию и свойства типовых элементов электромеханических комплексов и эмулятор программируемою контроллера (ЭПК), функциональным назначением которого является непосредственно реализация алгоритма управления.
Развивая блочно-модульную идеологию построения средств и систем управления до уровня механизмов, агрегатов и комплексов, можно выделить группы оборудования, для которых характерны обшие функциональные задачи упраапения в технологическом процессе (функциональные модули). Соответственно можно подготовить программные модели модулей и программные блоки, решающие задачу управления этими модулями. Из таких модулей можно формировать блоки-комплексы, а следовательно, обеспечивать экономичную технологию проектирования компьютерных систем управления любыми ЭК.
В результате использования блочно-модульного подхода к проектированию определяется объектно-ориентированная модель программного обеспечения и все основные объекты (включая данные и основные операции), требуемые для выполнения системных функций, а также следующие компоненты модели:
диаграммы классов, содержащие ключевые классы предметной области; спецификации классов, описывающие семантику классов, их
отношения, атрибуты и ключевые операции; диаграммы, изображающие взаимодействие объектов при выполнении
системных функций; схемы организации функционирования электромеханических
комплексов, классификации/детализации и схемы потоков данных с использованием связей родитель-потомок с различными основаниями
классификации; словарь данных, в котором перечислены все основные сущности,
относящиеся к предметной области, включая классы, отношения и атрибуты. Организационная структура отображает сложившуюся модель функционирования комплекса. При декомпозиции выделяются функциональные подсистемы, определяемые типовыми решаемыми
задачами.
Существующие математические пакеты в полной мере не решают поставленную задачу.
В основе предлагаемой методики визуализации динамических процессов, происходящих в ЭК. лежит одновременное решение дифференциальных уравнений, а следовательно, динамическое изменение в пространстве или плоскости положения графических примитивов (точек, линий, окружностей, прямоугольников и др.), отображающих движения механизмов оборудования, входящего в состав ЭК (табл. 14.1). Визуализация более сложных технологических объектов производится с использованием совокупности простейших графических примитивов.
Основная проблема, которая возникает при визуализации. — это время решения и объем информации о перемещении. Время решения зависит от порядка дифференциальных уравнений, которыми описывается СУ технологическим объектом. Однако если учесть, что СУ на первой стадии проектирования отлажена, т.е. настроены все ее контуры (рассчитаны регуляторы), то описание системы можно свести к описанию звеньев первого, второго порядков — передаточным функциям замкнутых внешних контуров — и математическому описанию свойств обрабатываемого материала. Это позволит повысить быстродействие в получении выходной координаты, характеризующей исполнительный орган, а следовательно, уменьшить объем информации о перемещении. Но упрощение математического описания потеряет всякий смысл, если частоты процессора компьютера приближаются к значению, при котором все расчеты будут выполняться в реальном времени. Поэтому основной задачей в этом случае является формирование графических примитивов и их динамическое отображение в зависимости от результатов математического моделирования.
Для решения поставленных задач применим математический пакет MATLAB. дописав недостающие функции (программные единицы).
Существует несколько способов взаимодействия системы MATLAB с внешними программами:
• запись расширения MATLAB на обычных языках программирования, таких как C/C++, Fortran и т.п.;