

НИРС Андреев / 140600.68_СДМ.В.2.1_Инжиниринг электроприводов и систем автоматизации.ч3
.pdfповреждения грузов на конвейере, т.е. S-образное изменение частоты при переходе от текущего значения f1, к заданному f2, определяет максимальную плавность хода.
Преобразователи частоты могут также реализовывать функцию компенсации люфта (см. рис. 12.2, а). Данная характеристика обеспечивает временную остановку изменения скорости при разгоне/торможении, что смягчает удар, возникающий при выборе люфта.
Вприводах существует возможность формирования характеристики вида U/f с требуемыми стартовым и номинальным напряжениями (рис. 12.2, б) и в зависимости от типа нагрузки (рис. 12.2, г).
Внекоторых случаях при управлении двигателем на отдельных частотах могуг возникать резонансные колебания механической системы исполнительного механизма. Для избежания этих явлений в преобразователе существует функция позволяющая вырезать из рабочего диапазона
резонансные частоты fp1 fp2, fp3 (рис. 12.2. в).
Таким образом, формирование различных законов управления
(требуемых входных воздействий) позволяет реализовывать различные режимы работы ЭП. При компьютерном моделировании с использованием MATLAB Simulink для этого можно применять как стандартные S-функции из разделов Sources (источники), Functions & Tables, Nonlinear, так и S-
функиии, разработанные пользователем. Стандартные S-функции из раздела Sources предназначены для описания рабочей нагрузки моделируемой системы, а также для формирования сигналов, обеспечивающих управление работой S-модели в целом или отдельных ее частей. Все блоки — источники сигналов имеют по одному выходу и не имеют входов (рис. 12.3).
В качестве источников сигналов (входных величин) могут использоваться следующие блоки:
Band-Limited White Noise (белый шум с ограниченной полосой) — генератор белого шума с ограниченной полосой;
Chirp Signal (гармонический сигнал) — источник гармонических колебаний переменной частоты;
Clock (часы) — генератор непрерывною временного сигнала;
Constant (константа) — источник постоянной величины (скаляра, вектора или матрицы);
Digital clock (цифровые часы) — источник дискретного временного сигнала:
Discrete Pulse Generator (дискретный импульсный генератор) — генератор дискретных импульсных сигналов;
Pulse Generator (импульсный генератор) — генератор импульсных сигналов;
Ramp (возбудитель) — генератор линейно возрастающего (убывающего) сигнала;
Random Number (случайное число) — источник дискретного сигнала,

амплитуда которого является случайной величиной, распределенной но нормальному закону;
Repeating Sequence (периодический сигнал) — генератор периодического дискретного сигнала произвольной формы;
Signal Generator (генератор сигнала) — генератор непрерывного сигнала произвольной формы;
Рис. 12.3. Раздел Sources MATLAB Simulink
Step (такт) — источник единичного дискретного сигнала с заданными параметрами;
Sine Wave (генератор гармонических колебаний);
Uniform Random Number (равномерное случайное число) — источник дискретного сигнала, амплитуда которого является равномерно распределенной случайной величиной.
Два блока из раздела Sources отличаются от перечисленных блоков тем, что обеспечивают использование в модели различных числовых данных, полученных ранее как с помощью Simulink, так и другими средствами
MATLAB:
блок From File (ввод из файла) обеспечивает ввод в S-модель данных, хранящихся в МАТ-файле;
блок From Workspace (ввод из рабочей области) обеспечивает ввод в модель данных непосредственно из рабочей области MATLAB.

Структура данных в МАТ-файле представляет собой многомерный массив с переменным числом строк, которое определяется числом регистрируемых переменных. Элементы первой строки содержат последовательные значения модельного времени, элементы других строк — соответствующие значения переменных. Например, с помощью блока Signal Generator формируется сигнал, представленный на рис. 12.4.
В состав Functions & Tables входят три мощных и универсальных блока
(рис. 12.5): Fcn (функция), MATLAB Fcn (функция MATLAB) и S-function (S-
функция).
Рис. 12.4. Блок Signal Generator MATLAB Simulink:
a — сформированная диаграмма изменения скорости привода: б — модель изменения скорости привода

Рис. 12.5. Состав S-Functions MATLAB Simulink
В качестве параметра настройки блока Fcn можно ввести любое вычисляемое выражение, аргументом которого является значение входного сигнала. В качестве операндов вычисляемого выражения блока Fcn могут также использоваться переменные, находящиеся в рабочей области MATLAB.
Блок MATLAB Fcn позволяет применить к входному сигналу любую процедуру обработки, реализованную в виде М-файла. Это может быть как библиотечная функция пакета MATLAB, так и подпрограмма, созданная разработчиком S-модели.
Блок S-function обеспечивает использование в блок-диаграмме так называемых S-функиий. Такая функция является самостоятельной программой, написанной на языке MATLAB или C/C++, которая имеет определенную структуру и хранится в М-файле или в МЕХ-файле.
Стандартными аргументами S-функции являются: Т — вектор значений модельного времени;
X — множество состояний моделируемой системы (непрерывное или дискретное);
U — вектор входных воздействий;
FLAG — признак, определяющий формат представления результата [61]. S-функиия может также иметь произвольное число дополнительных
аргументов, назначение которых определяется разработчиком. Примеры S- функций, реализованных в виде М-файлов и хранящихся в папке matlab\toolbox\ simulink\blocks, могут быть использованы в качестве шаблонов для создания собственных S-функций.

3. Примеры моделирования и исследования технологических процессов
3.1Пример 1 Движение кабины лифта
Вкачестве примера рассмотрим S-функцию, реализующую график движения кабины лифта [8]. Исходными данными для рассчета являются: vуст— установившеесяскорость движения лифта; а — ускорение; р — рывок.

Для моделирования ограничений на выходные сигналы регуляторов и технологические параметры можно применить раздел MATLAB Simulink Nonlinear (рис.12.6).
Сочетания приведенных ранее разделов MATLAB Simulink позволяют реализовывать различные режимы работы ЭП.
РИС . 12.6. Раздел MATLAB Simulink Nonlinear, библиотека Discontinuities
3.2 Пример 2 Исследования системы управления ножницаци и катящимся резом.
В качестве примера рассмотрим компьютерное исследование системы управления ножницами с катящимся резом. Описание автоматизированных электроприводов и системы управления см. в [8].
Выбором параметров кинематической схемы ножниц и профиля ножа обеспечиваются требуемые условия реза листа при качении ножа относительно проката при минимальном угле реза. Исключение скольжения ножа относительно металла обеспечивает минимизацию затрат энергии при резе. Система управления в соответствии с заданием реализует циклические движения ножниц при резе в прямом и обратном направлениях. Временные диаграммы изменений скорости ω, угла а и момента М кривошипа при прямом и обратном резе показаны на рис. 12.7. На участках 0…t1 , t4…t5, t6…t7, t10…t11 изменение угла происходит по параболе.
Для обеспечения плавности разгона и торможения целесообразно использовать S-образную характеристику изменения скорости (рис. 12.8), входящую в меню параметрических настроек приводов Simovert. График изменения ускорения в режимах разгона и торможения в этом случае имеет вид треугольника (в отличие от прямоугольного графика изменение линейной скорости).
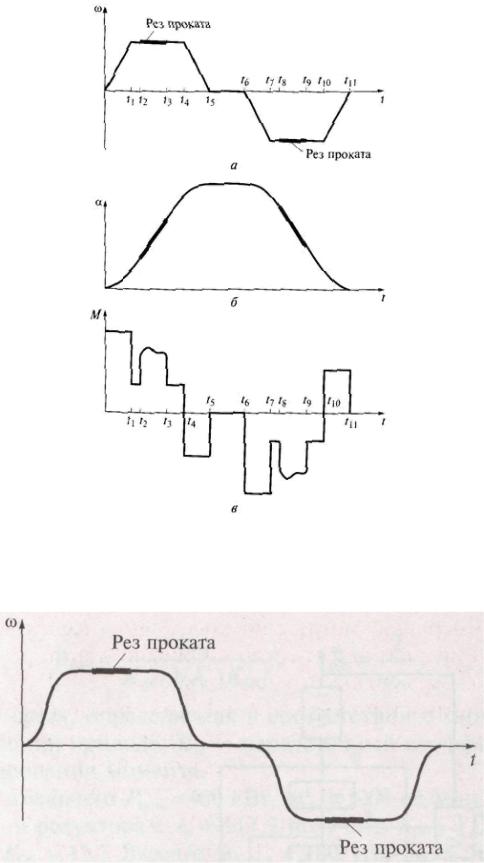
Рис. 12.7. Временные диаграммы изменений скорости (а), угла (б) и момента (в) кривошипа
Рис. 12.8. Временная диаграмма изменения скорости с S-образными характеристиками разгона и торможения

Математическая модель системы управления движением однокривошипных ножниц показана на рис. 12.9. Модель отражает динамические процессы в системе управления с учетом упругих деформаций в механической части электропривода и выравнивания нагрузки электродвигателей. Так как кроме исследования динамических характеристик системы необходимо выполнить оценку энергозатрат на цикле реза, структурная схема дополнена элементами оценки энергии А в интервале времени цикла Тц . Все параметры и переменные системы управления приведены к валу кривошипа.
На схеме обозначены:
W`M , W"M, Wpc - передаточные функции соответственно замкнутых контуров регулирования моментов M1, М2 и регулятора скорости;
Кв - коэффициент выравнивания нагрузки двигателей (при Кв = 1 двигатели имеют по половине номинальной нагрузки кривошипа);
Kос - коэффициент обратной связи по скорости (KОС = KДС iр (где КДС - коэффициент датчика скорости, iр - передаточное число редуктора);
f зад (.) - функция задания управляющего воздействия ωзад;
f5(.), f5'(.) - функции, определяющие электрические потери в приводе; M13, М23 - сигналы задания моментов электродвигателей;
Mc1, М'с1, Мс2, Мс3 - моменты сопротивлений в элементах привода, обусловленные силами трения;
Pм1, Pэ1, Pэ2, PΣ1, PΣ2, PΣ - мгновенные мощности соответственно механические, электрические и суммарные;
А - энергия на цикле реза.
Регулятор скорости и замкнутые контуры регулирования моментов являются частью комплектных электроприводов Simovert VC. Следует параметрировать регулятор скорости как ПИ-регулятор.
Для моделирования используется ПИ-регулятор скорости с следующими параметрами передаточной функции:

Рис. 12.9. Математическая модель системы управления движением однокривошипных ножниц
где  - частота среза, определяемая в соответствии с минимальной частотой упругих колебаний привода: Км - передаточный коэффициент замкнутого контура регулирования момента.
- частота среза, определяемая в соответствии с минимальной частотой упругих колебаний привода: Км - передаточный коэффициент замкнутого контура регулирования момента.
Для двигателя, имеющего Рном = 400 кВт, nном = 1000 об/мин, Мном = 3826 |
|||
Н.м, Мmax |
= 8800 Н.м, и редуктора с iр = 117,2 получим: Км = 1.03х 105 |
||
Нм/В; |
|
Jэ = |
313. 103 кг.м2 ; Кос = 11,7 В/рад/с; ωуmin= 160 1/с; ωср = 20 |
1/с; |
= 0.1 |
с; |
= 5,19. |
Компьютерная модель системы управления, реализованная в Simulink MATLAB в соответствии с математическим описанием, приведенным на рис. 12.9. показана на рис. 12.10.