

Содержание.
Задание………………………………………………………………………………………………….2
Введение………………………………………………………………………………………………...4
-
Построение структурной схемы нескорректированной системы и определение передаточных функций её звеньев…………………………………………………………………………………5
-
Оценка точности и анализ качества исходной системы....……………………………………….7
-
Построение желаемой ЛАЧХ и определение желаемых передаточных функций разомкнутой и замкнутой системы. Оценка показателей качества желаемой системы …...…………………...10
-
Синтез последовательного корректирующего устройства…………………..………………….15
-
Реализация корректирующего устройства в виде аналогового и цифрового регуляторов……17
-
Оценка точности и качества скорректированной системы с учётом ограничений выходного сигнала регулятора путём моделирования………………………………………………………..21
-
Построение и описание функциональной схемы скорректированной системы……………….24
Заключение……………………………………………………………………………………………...26
Библиографический список использованной литературы…………………………………………...27
Приложение……………………………………………………………………………………………..28
Задание. Задание 5. Вариант 3.
На электрических станциях при производстве электроэнергии предъявляют определённые требования к стабильности частоты f генерируемой ЭДС. Частота f однозначно определяется угловой скоростью w рабочего колеса гидротурбины. В связи с этим гидротурбины на электростанциях оснащают САР угловой скорости. На рисунке 1 показана схема одного из вариантов такой САР.
В данной системе объектом регулирования является гидротурбина 1, регулируемой величиной – угловая скорость w. Она при постоянном расходе воды изменяется в зависимости от нагрузки на валу турбины, т. е. от мощности Р, которая потребляется от генератора 2 (с увеличением мощности угловая скорость снижается, с уменьшением возрастает). Таким образом, мощность Р является внешним возмущающим воздействием на объекте регулирования. Для регулирования угловой скорости предусмотрена заслонка 3, с помощью которой изменяется расход воды через турбину. Он однозначно зависит от вертикального перемещения Х заслонки. Следовательно, перемещение заслонки Х можно рассматривать как регулирующее воздействие объекта регулирования. Угловая скорость w контролируется посредством тахогенератора 4, ЭДС Е которого сравнивается с задающим напряжением U0. Сигнал рассогласования ΔU через усилитель 5 управляет посредством электродвигателя 6 и редуктора 7 заслонкой 3.
Динамические свойства элементов САР описываются следующей системой уравнений:
![]() - гидротурбина; (1)
- гидротурбина; (1)
E=kTw – тахогенератор; (2)
ΔU=U0-E – сравнивающий орган; (3)
U=kyΔU – электронный усилитель; (4)
![]() - электродвигатель совместно с редуктором
и заслонкой. (5)
- электродвигатель совместно с редуктором
и заслонкой. (5)
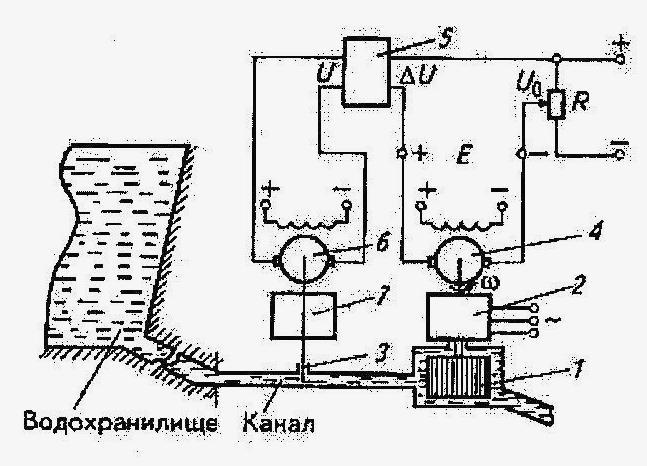
Рис 1. Схема САР угловой скорости рабочего колеса гидротурбины.
Таблица1.
|
Вариант |
Т0 |
k0 |
k1 |
kт |
kу |
Р |
ТМ |
ТЯ |
kэ |
v |
δ |
|
c |
|
|
|
|
кВт |
с |
с |
|
% |
% |
|
|
3 |
0,11 |
6 |
0,016 |
1,0 |
90 |
-70 |
0,018 |
0,003 |
0,02 |
1,0 |
15 |
Физический смысл переменных, входящих в уравнения, отражён в описании схемы САР. Параметры Т0, Тм, Тд, и k0, k1, kT, kУ, kЭ – соответственно постоянные времени и передаточные коэффициенты. Их размерности и значения приведены в табл. 1. Выходной сигнал электронного усилителя ограничен уровнем 110 В. Заданное значение скорости w=30 рад/с.
Результатом курсового проектирования должна быть скорректированная система, параметры которой соответствуют параметрам, приведённым в задании.