

2.4 Расчет статической модели гидросистемы
При постоянном воздействии система находится в установившемся равновесном состоянии. Ее фазовая координата (давление Р и расход Q) при этом постоянна. Такой режим функционирования системы называется статическим и достигается при постоянном внешнем воздействии:
– давления к потребителю (Рb1, Pb2, Pb3),
– подачи или давления насоса QH1 (PH1), QH2 (PH2).
При этом устанавливаются постоянные значения фазовых координат системы:
– расход в гидромагистралях,
– давление в упругом элементе.
Из данного утверждения следует:
![]() (25)
(25)
Из (28) и (29) получаем систему для статического режима:
 (26)
(26)
Учитывая нелинейные свойства диссипативных элементов гидравлической системы, их компонентное уравнение имеет вид:
![]() (27)
(27)
Перенесем в правую часть системы внешние воздействия, тогда статическая модель будет иметь вид:
 (28)
(28)
Для
ее решения используются численный
метод, для которого предварительно
сформируем матрицу Якоби J.
Элементами матрицы Якоби для сформированной
нелинейной системы являются частные
производные от нелинейной вектор-функции
![]() по фазовым координатам системы (Q1,
Q2,
Q3,Q4,Q5,
PУ1).
по фазовым координатам системы (Q1,
Q2,
Q3,Q4,Q5,
PУ1).
 (29)
(29)
Нахождение частной производной по расходу от давления в диссипативном элементе (27) имеет вид:
![]() (30)
(30)
Матрица Якоби исходной гидросистемы имеет вид:
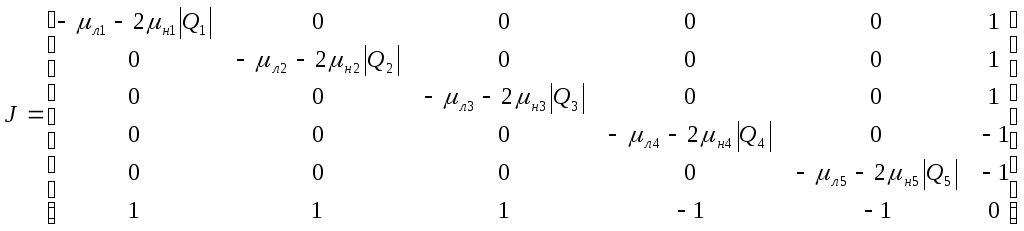 (31)
(31)
Для решения статической модели используем численный метод Ньютона, алгоритм которого включает следующие этапы:
– выбор
начального приближения
![]() ,
где
,
где
![]() - вектор фазовых координат (Q1,
Q2,
Q3,
PУ1),
V0
– нулевой вектор-столбец;
- вектор фазовых координат (Q1,
Q2,
Q3,
PУ1),
V0
– нулевой вектор-столбец;
– вычисление
матрицы Якоби Jk
в точке
![]() K
(k=0,
1, 2 …);
K
(k=0,
1, 2 …);
– вычисление
вектора невязок
![]() .
Вектор невязок получается из системы
уравнений (28) для статического режима:
.
Вектор невязок получается из системы
уравнений (28) для статического режима:
 (32)
(32)
– определение вектора поправок:
![]() (33)
(33)
– определение нового приближения вектора искомых фазовых переменных:
![]() (34)
(34)
– проверка условия окончания итерационного процесса, при выполнении условия, что Vk и Vk+1 соизмеримы (совпадают до десятых), иначе происходит переход на предыдущие этапы и вычисляется следующая итерация.
2.4.1 Вычисление параметров трубопровода гидросистемы. Значения коэффициентов линейных и нелинейных потерь для конкретной магистрали находят по формулам:
![]() ,
(35)
,
(35)
где
![]() -
коэффициент линейных потерь, H·с/м5;
-
коэффициент линейных потерь, H·с/м5;
SТР – площадь сечения трубопровода, м2.
![]() ,
(36)
,
(36)
где
![]() - коэффициент
нелинейных потерь, H·с/м5.
- коэффициент
нелинейных потерь, H·с/м5.
Площадь сечения трубопровода можно найти по формуле:
![]() (37)
(37)
Коэффициент жесткости участка можно найти по формуле:
 ,
(38)
,
(38)
где
![]() -
доля объема трубопровода;
-
доля объема трубопровода;
Vтр – объем трубопровода, м3.
Vтр=Sтр·l (39)
Доля объема трубопровода рассчитывается как отношение объема отдельного участка к сумме объемов всех n соединенных между собой участков:
 (40)
(40)
где
![]() - объема трубопровода
i-ого
участка, м3.
- объема трубопровода
i-ого
участка, м3.
Коэффициент жесткости упругого элемента находится по формуле:
 (41)
(41)
По исходным данным и полученным результатам получаем жесткость упругого элемента c1=8,809·1011 Н/м5.
Коэффициент массы вычисляется по формуле:
![]() (42)
(42)
Полученные результаты для отдельных участков трубопровода приведены в таблице 4.
Таблица 4 – Параметры трубопровода гидросистемы
-
№
магист.
Sтр, ·10-6
м2
 ,
·106
,
·106H·с/м5
 ,
·1010
,
·1010H·с/м5
Vтр,·10-6
м3
cг, ·1012
Н/м5
mг,·106 кг/м4
1
176.715
15.61
7.41
265.07
0.308
2.054
7.3
2
176.715
10.41
4.48
176.715
0.205
4.622
4.87
3
78.54
105.4
39
157.08
0.183
5.875
21.9
4
314.159
1.812
1.06
172.79
0.201
4.814
1.5
5
176.715
5.205
2.24
88.36
0.103
18.489
2.4