

2.4.2 Результаты статического анализа.
Программа для расчета фазовых координат при статическом процессе в математическом пакете MathCad 13 приведена в приложении 1. Индексы массивов для простоты начинаются с 1. Для достаточной точности применяется 5 итераций. Результаты вычислений приведены в таблице 5.
Таблица 5 – Результаты статического анализа
|
Фазовая коорд. |
при Рн=0МПа |
при Рн=400МПа |
|
Q1, м3/с |
19.34 |
24.726 |
|
Q2, м3/с |
29 |
37.085 |
|
Q3, м3/с |
2.864 |
3.662 |
|
Q4, м3/с |
109.25 |
62.821 |
|
Q5, м3/с |
58.039 |
2.652 |
|
Pу1, 106 Па |
302.1 |
386.2 |
2.5 Анализ динамической модели гидросистемы
Динамическая модель описывает переходный процесс гидросистемы. В общем случае система дифференциальных уравнений, описывающих гидравлическую систему, получающаяся из выражения (24), имеет вид:
![]()
 (43)
(43)
где А – матрица Якоби,
![]() - вектор
фазовых координат,
- вектор
фазовых координат,
![]() -
вектор-функции внешних воздействий,
-
вектор-функции внешних воздействий,
![]() -
вектор функции внешних воздействий.
-
вектор функции внешних воздействий.
Для динамической модели матрицу Якоби можно сформировать на основе (24) и (28), аналогично статической модели:
 (44)
(44)
Переходный процесс определяется в результате численного интегрирования системы (43), для чего необходимо произвести выбор ряда параметров.
Пусть переходный процесс оценивается как реакция системы, находящейся в состоянии покоя, на ступенчатое воздействие вида:
 (45)
(45)
где u0 и uk – начальное и конечное значение функции воздействия u(t), которая в нашем случае имеет вид:
 (56)
(56)
Начальные и конечные значения всех фазовых координат определены при анализе статического режима (таблица 5).
 (47)
(47)
Если система устойчивая, то через некоторый промежуток времени, система перейдет из состояния V0 в состояние Vk. Для численного интегрирования будем использовать неявный метод Эйлера.
2.5.1 Выбор шага интегрирования. Для устойчивости самого метода проведем выбор шага интегрирования h исходя из условия:
![]() ,
(48)
,
(48)
где
![]() - собственное значение матрицы Якоби.
- собственное значение матрицы Якоби.
Для
комплексного значения
![]() условие имеет вид:
условие имеет вид:
![]() (49)
(49)
Собственными
значениями матрицы Якоби порядка n
называют корни
![]() ,
где
,
где
![]() ,
ее характеристического уравнения,
определяемого по формуле:
,
ее характеристического уравнения,
определяемого по формуле:
![]() (50)
(50)
где А – матрица Якоби динамической модели;
Е – единичная матрица.
Произведем расчет матрицы Якоби по формуле (48), подставляя начальные значения фазовых координат:
(51)
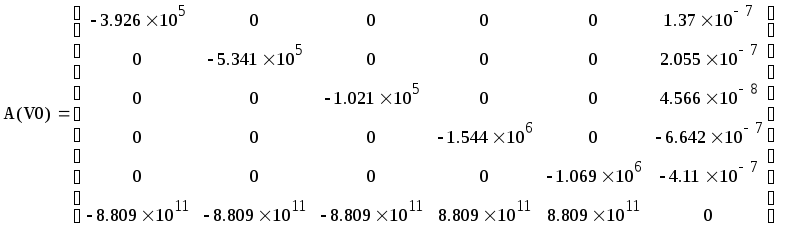
Тогда характеристическое уравнение имеет вид:
![]() (52)
(52)
Вычислим корни характеристического уравнения с помощью программы MathCad 13, тогда собственные значения матрицы Якоби имеют вид:
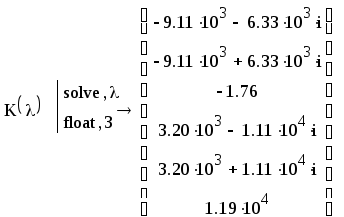
Наличие комплексно-сопряженных корней дает затухающий колебательный процесс ряда фазовых координат. Для гидравлической системы рекомендуемый шаг интегрирования h=0.5 с. Выполним проверку устойчивости численного метода Эйлера при данном шаге.
![]()
![]()
>1
![]()
![]()
>1
![]()
![]()
>1
![]()
![]()
>1
![]()
![]()
>1
![]()
![]()
>1
Проверка условий выполняется, следовательно, шаг h=0.5с обеспечит устойчивость метода и приемлемую точность вычислений.
2.5.2 Решение систем дифференциальных уравнений методом Эйлера. Формула численного интегрирования неявного метода Эйлера имеет вид:
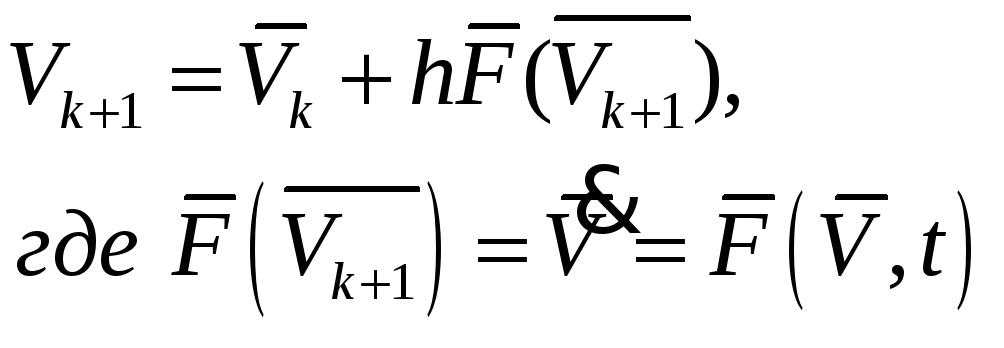 (53)
(53)
Совместное преобразование двух последних выражений приводит к записи:
![]() (54)
(54)
где
![]() - модифицированная матрица Якоби на k+1
шаге, которая формируется по следующему
правилу:
- модифицированная матрица Якоби на k+1
шаге, которая формируется по следующему
правилу:
Диагональные элементы матрицы Якоби на k-ом шаге пересчитываются по формуле:
![]() (55)
(55)
Остальные элементы не изменяются. Для матрицы размерности 6х6 получаем:
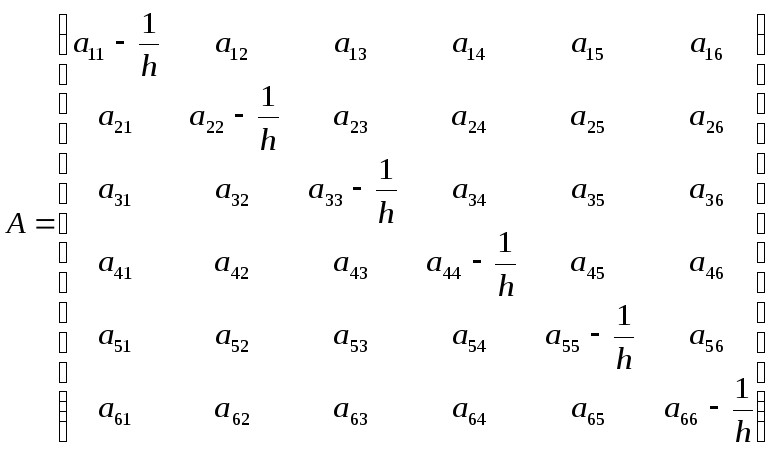 (56)
(56)
![]() -
модифицированный вектор входных
воздействий на k+1
шаге, определяемый по формуле:
-
модифицированный вектор входных
воздействий на k+1
шаге, определяемый по формуле:
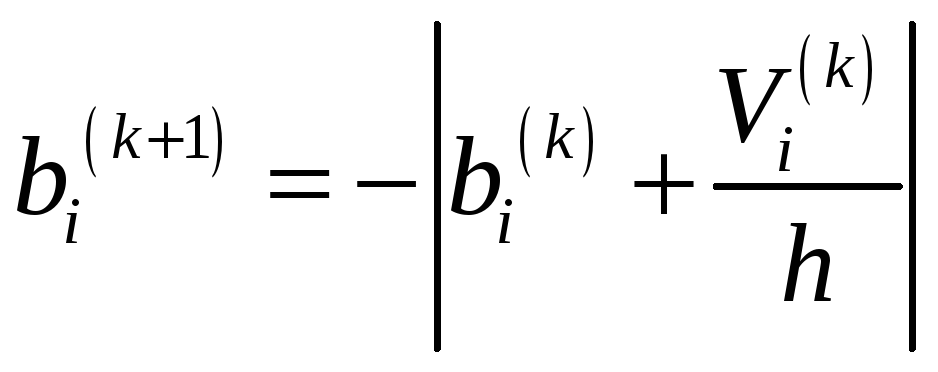 (57)
(57)
Решение системы уравнений (54) дает значение фазовых координат на k+1 шаге, то есть в момент времени tk+1.
Алгоритм неявного метода Эйлера с постоянным шагом интегрирования h:
-
задание шага интегрирования h;
-
задание начальных значений фазовых переменных
 при t0=0;
при t0=0; -
вычисление времени tk+1=tk+h, где k=0,1,2… ;
-
вычисление модифицированных матриц
 и
и
 на k+1
шаге;
на k+1
шаге; -
решение системы уравнений (54) с целью определения
 в момент времени
tk+1;
в момент времени
tk+1; -
переход к этапу (3) до тех пор, пока в случае устойчивой системы фазовые координаты не достигнут состояния конечного значения
 .
.
Начальные
значения вектора
![]() определяются на основании входных
воздействий системы (24). В качестве
начальных значений фазовых переменных
берем вектор начальных значений
определяются на основании входных
воздействий системы (24). В качестве
начальных значений фазовых переменных
берем вектор начальных значений
![]() .
Листинг программы, написанной в
математическом пакете MathCad
13, для определения показателей качества
переходного процесса приведена в
приложении 2.
.
Листинг программы, написанной в
математическом пакете MathCad
13, для определения показателей качества
переходного процесса приведена в
приложении 2.
 (58)
(58)