

2 Выбор датчиков информации
AT86RF401 (приемник SB1) - представляет собой интеллектуальный миниатюрный передатчик с высокой степенью интеграции на базе микроконтроллера AVR 8 бит RISC. Для организации законченной радиосистемы с манипуляцией включение/выключение (OOK) необходим только кварцевый резонатор, литиевый элемент, три конденсатора, дроссель и петлевая антенна.
U3741BM (передатчик SB2) - предназначен для работы на частотах 300-450МГц, в технической документации Atmel приводятся параметры микросхемы и ее "обвязка" только для двух частот: 315МГц и 433.92МГц Переход с одной частоты на другую осуществляется с помощью смены нескольких внешних компонентов (резонатора и конденсаторов).
3 Разработка алгоритма контроля и управления
Алгоритм управления состоит из следующих шагов (этапов):
-
Включение системы с кнопки.
-
Ввод с клавиатуры, чтобы измерить расстояния.
-
Отображение на дисплее результат измерения.
4 Выбор семейства и типа микроконтроллера
Для разработки бегущей строки на базе микропроцессора выбран микроконтроллер ATtiny2313.
Этот выбор обусловлен рядом преимуществ:
- низкая стоимость;
- высокая надежность;
- широкая функциональность;
- высокая степень миниатюризации;
- малое энергопотребление;
- достаточная производительность для выполнения всех требуемых функций.
Микроконтроллер имеет следующие аппаратные особенности:
- 8- ми разрядный микроконтроллер;
- 118 мощных инструкций;
- 128 байта EEPROM;
- рабочие регистры общего назначения 32 х 8;
- полнодуплексный UART;
- 15 программируемых линий ввода/вывода;
- один 16-ти разрядный таймер/ счетчик с отдельным предварительным делителем частоты с режимами сравнения и захвата;
- один 8-ми разрядный таймер/ счетчик с отдельным предварительным делителем частоты
5 Разработка структурной схемы устройства
Структурная схема микропроцессорная система контроля расстояния
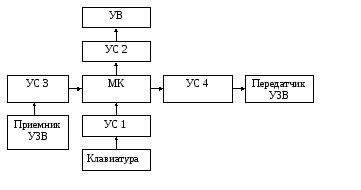
Рисунок 1 - структурная схема, состоящая из следующих функциональных частей:
- УВ – ультразвуковые волны;
- МК – микроконтроллер;
- УС 1 ,УС 2, УС 3,УС 4 устройства сопряжения;
- Клавиатура – устройства управления;
- Приемник УЗВ – приемник ультразвуковых волн;
6 Разработка принципиальной схемы устройства
Схема электрическая принципиальная разрабатывалась в PCAD 2006 Schematic устройство представлено на рисунке
Схема состоит из следующих элементов:
- Микроконтроллер (ЦПУ) – позиционное обозначение DD1;
- Транзисторы (VT);
- Резисторы (R);
- Кнопки (SB1,SB2);
- Разъем питания (X2);
- Приемник УЗВ (BA2);
- Передатчик УЗВ (BA1);
Принцип работы устройства:
Данные поступают через устроство ввода данных и устройство сопряжения в память микроконтроллера. Микроконтроллер поступившие данные пересылает на устройство вывода информации для дальнейшего их отображения. Режим вывода данных определяется программой микроконтроллера.