

1fedorenko_a_a_ivanchura_v_i_praktikum_po_teorii_avtomatiches
.pdf31
Пример №2
Дано: W ( p ) = |
K( T5 p + 1 ) |
-1 |
|
|
-1 |
|
||
|
|
; S=-2; |
ωc=200 c |
; K=2500; T6=0,05 |
c |
|
; |
|
p( T p + 1 )2 |
|
|
||||||
|
( T p + 1 ) |
|
|
|
|
|
||
|
6 |
3 |
|
|
|
|
|
|
T5=0,001 c-1; T3=0,01; g(t)=0,2t; ν=-1; γ=200
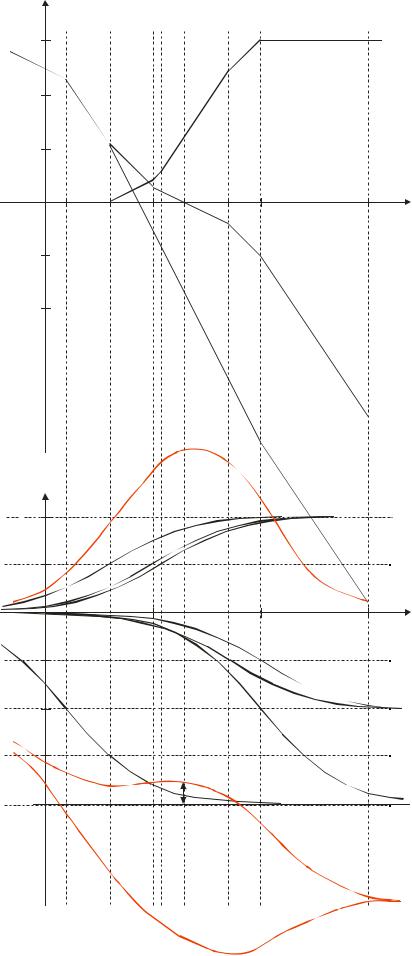
1.Строим ЛАХ нескорректированной системы
W ( p ) = |
2500( 0,001 p + 1 ) |
|
|
|
p( 0,05 p + 1 )2 ( 0,01 p |
+ 1 ) |
|||
|
||||
20 lgK=20 lg2500=67,95 |
ω6=1/T6=20 c –1 ; ω5=1/T5=1000 c-1; |
|||
ω3=1/T3=100 c-1;
Нескорректированная система не имеет запаса устойчивости по фазе и амплитуде.
2. Синтезируем желаемую ЛЧХ согласно исходных данных, используя литературу [2] (См. Пример №1). Для данного типа ЖЛАХ определяем сопрягающие частоты ω4 и ω2.
a = π − |
γ ( ωc ) = |
3,14 |
− 0,35 = 1,22; |
|
|
|
||||||||||
|
|
|
|
|
||||||||||||
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
||||
ω4 |
= |
|
a |
ωc = |
1,22 * 200 |
= 122; |
|
|
|
|||||||
2( S − 1 ) |
|
|
|
|
|
|||||||||||
|
|
|
2 |
|
|
|
|
|||||||||
|
|
1 |
|
= |
2ωc |
= |
2 * 200 |
= 327 ,87; ω2 = |
1 |
|
= 500; |
|||||
T2 + T5 |
|
|
0,003 − 0,001 |
|||||||||||||
|
a |
1,22 |
|
|
|
|
||||||||||
Cтроим ЖЛАХ.
3.Строим ЛЧХ корректирующего устройства:
Lк=Lж-Lн; ψк=ψж-ψн;
ПФ корректирующего устройства:
Wк( p ) = |
( T1 p + 1 )( T3 p + 1 )( T4 p + 1 ) |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
( T p + 1 )( T p |
+ 1 )2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
2 |
|
5 |
|
|
|
|
|
|
|
|
|
|
ПФ ЖЛАХ: |
|
|
|
|
|
|
|
|
|
|
|
|||
Wж( p ) = |
( T1 p + 1 )( T4 p + 1 )K |
|
|
; |
|
|
|
|||||||
p( T p + 1 )2 ( T p |
+ 1 )( T p + 1 ) |
|
|
|
||||||||||
|
|
|
|
|
|
|||||||||
|
|
6 |
|
2 |
|
5 |
|
|
|
|
|
|
|
|
4. |
|
Ошибка от задающего воздействия: |
|
|
|
|||||||||
ξgуст=limp→0pФξg(p)*g(p); |
|
|
|
|
|
|
|
|
||||||
Фξg ( p ) = |
1 |
|
= |
|
|
|
|
1 |
|
|
= |
|||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
K( T4 p + |
|
|
||||||||
|
|
1 + Wж( p ) |
1 + |
|
1 )( T1 p + 1 ) |
|
|
|||||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
p( T p + 1 )2 |
( T p + 1 )( T p + 1 ) |
|||||||
|
|
|
|
|
|
|
6 |
|
|
|
5 |
2 |
|
|
32
= |
|
|
|
|
p( T p + 1 )2 ( T p + 1 )( T p + 1 ) |
|
|
|
|
|
|
|
|
|||||
|
6 |
|
5 |
2 |
|
|
; |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
p( T p + 1 )2 ( T p + 1 )( T p + 1 ) + K( T p + 1 )( T p + 1 ) |
|
|
|
|
|
||||||||||||
6 |
5 |
|
2 |
|
4 |
1 |
|
|
|
|
|
|
|
|
||||
g( p ) = |
0,2 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
p2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
ξ gуст = lim p→0 p |
|
|
p( T p + 1 )2 |
( T p + 1 )( T p + 1 ) |
0,2 |
= |
||||||||||||
|
|
6 |
|
5 |
2 |
|
|
|
* |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
2 |
||||||||
|
|
|
|
|
|
p( T p + 1 )2 ( T p + 1 )( T p + 1 ) + K( T p + 1 )( T p + 1 ) p |
|
|||||||||||
|
|
6 |
5 |
|
2 |
4 |
|
1 |
|
|
|
|
||||||
= lim p→0 |
|
|
0,2( T |
p + 1 )2 ( T |
p + 1 )( T p + 1 ) |
= |
|
|
|
|
||||||||
|
|
|
6 |
5 |
2 |
|
|
|
|
|
|
|
||||||
p( T p + 1 )2 |
( T p + 1 )( T p + 1 ) |
+ K( T p + |
1 )( T p + 1 ) |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
6 |
|
5 |
2 |
|
4 |
1 |
|
|
|
|
|
|
||||
= |
0,2 |
= 0,00008 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
2500 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
33
L, дБ
60 |
|
|
|
|
Lк |
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
ω, c-1 |
10 |
ω1 |
102 |
ωC |
ω2 |
103 |
104 |
ω6 |
ω4 |
ω5 |
|
|||
-20 |
|
|
|
|
|
|
|
|
|
|
|
|
Lж |
-40 |
|
|
Lн |
|
|
|
|
|
|
|
|
|
Ψ, град |
π/2 |
Ψк |
π/4 |
ω, c-1 |
−π/4 |
−π/2 |
−3π/4 |
γ |
−π |
Ψж |
Ψн |

34
2.4. Контрольная работа №3
Методика синтеза параллельных КУ (местных обратных связей)
1. Выбрать физически реализуемую охваченную часть:
W2 |
( p) = |
100(0,001p + 1) |
|
p(0,05 p +1) |
|||
|
|
2.ПФ неохваченной части: ( p) = 25
1(0,05 p +1)(0,01p +1)
3.ПФ обратной связи Wпк ( p) находим из выражения:W
Wпк ( p) = W1 Wж
при выполнении условия(*): |Wпк ( jω)W2 ( jω) | >>1 в диапазоне частот до 10ωc
Строим ЛАХ L1 (ω) = 20 lg | W1 ( jω) |, Lж (ω), Lпк (ω) = L1 (ω) - Lж (ω)
По ЛАХ Lпк (ω) |
записываем ПФ звена обратной связи: |
|||||||||||
|
|
Wпк |
( p) = |
|
kпк p(T2 p +1)(T5 p +1)(T6 p +1) |
|
; TД = 2,5 ×10−3 c |
|||||
|
|
(T1 p +1)(T3 p +1)(T4 p +1)(TД p + |
1) |
|||||||||
|
|
|
|
|
|
|
||||||
Если степень числителя больше степени знаменателя, то для физической |
||||||||||||
реализуемости Wпк ( p) вводим дополнительные звенья. |
||||||||||||
4. Проверка: |
|
|
|
|
|
|
|
|
|
|
||
ПФ скорректированной системы: |
|
|
||||||||||
Wпк ( p) = |
|
k1W1W2 |
|
= |
W1 |
× |
|
k1W2Wпк |
|
|
|
|
|
+ k'W2Wпк |
|
|
|
+ k'WжWпк |
|
|
|||||
1 |
|
Wпк 1 |
|
|
||||||||
ПФ разомкнутого внутреннего контура: Wвк = k'W2 ×Wпк . Первоначально k’=1
Строим ЛЧХ 20 lg | Wвк ( jω) | .
Т.к. условие (*) не выполняется, то в прямую цепь контура введем дополнительный коэффициент k’. В результате получаем систему со следующей структурой:
X(p) |
|
Y(p) |
W1 ( p) |
K’ |
W2 ( p) |
|
|
Wпк ( p) |

35
L, дБ
60 |
Lж |
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
L1 |
|
|
|
|
|
|
20 |
L2 |
|
|
|
|
|
|
|
|
|
|
|
|
Lпк |
ω, c-1 |
|
|
|
|
|
|
|
|
|
10 |
ω1 |
102 |
ω2 |
103 |
104 |
|
|
ω6 |
ωC |
ω5 |
ωд |
|
||
-20 |
|
|
|
|
|
|
|
-40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20lgK' |
|
Lзвк |
|
|
|
|
Lвк |
ω, c-1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
Lж |
Lск |

36
2.5. Исходные данные для контрольных работ №№4, 5.
1.Задана функциональная схема (рис. 2.1.) системы стабилизации скорости вращения двигателя постоянного тока независимого возбуждения.
На входе полупроводникового усилителя ПУ сравниваются два напряжения: напряжение управления Uу, пропорциональное заданному значению скорости, и напряжение тахогенератора Uтг пропорциональное скорости вращения вала двигателя ω . Разность этих напряжений U усиливается усилителем ПУ и затем напряжение Uпу поступает на вход управляемого тиристорного преобразователя ТП, на выходе которого формируется напряжение якорной цепи Uя двигателя.
Объект управления - двигатель постоянного тока М с обмоткой независимого возбуждения ОВД. Управляющее воздействие - напряжение Uу снимаемое с потенциометра R. Управляемая величина - скорость вращения ω . Возмущающее воздействие - момент сопротивления Мс рабочего механизма. Датчик скорости - тахогенератор ТГ с независимой обмоткой возбуждения ОВТГ.
U |
ПУ |
Uпу |
ТП |
Uя |
М |
|
ОВД |
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uу |
|
|
|
|
|
|
|
|
|
|
|
|
Мс |
|
|
Uтг |
|
|
|
|
ω |
ТГ |
ОВТГ |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Рис. 2.1
Связь между входными и выходными переменными каждого из элементов системы характеризуется следующими уравнениями:
промежуточный усилитель:
UПУ = КПУ × U ,
где U = UУ − UТГ - рассогласование; тиристорный преобразователь:
T |
dUЯ |
+ U |
|
= К |
|
U |
|
; |
|
|
|
|
|||||
ТП |
dt |
Я |
|
ТП |
|
ПУ |
||
двигатель:
37
T |
dМ |
ЭМ |
+ М |
|
= |
КД |
U |
|
− |
1 |
ω; |
|||||
|
|
|
|
|
К |
|
|
К |
|
|||||||
Я |
dt |
ЭМ |
|
ДВ |
|
Я |
|
ДВ |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
ТЭМ |
dω |
= КДВ (МЭМ ± МС ) ; |
|
|
||||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||
тахогенератор: |
|
|
|
|
|
= КТГ × ω. |
|
|
|
|
|
|||||
|
|
|
|
|
UТГ |
|
|
|
|
|
||||||
Здесь КПУ, КТП, КТГ, КД |
и КДВ – |
коэффициенты передачи промежуточного |
||||||||||||||
усилителя, тиристорного преобразователя, тахогенератора, двигателя по управлению и двигателя по возмущению соответственно; ТТП, ТЯ, ТЭМ – постоянная времени тиристорного преобразователя, электромагнитная постоянная времени якорной цепи двигателя и электромеханическая постоянная времени двигателя.
Варианты значений параметров элементов системы приведены в табл. 2.1. 2. Задана функциональная схема следящего электропривода (рис. 2.2). Измеритель рассогласования, который образуется путем включения по
трансформаторной схеме двух вращающихся трансформаторов, ротор одного из которых связан с задающей осью (вращающийся трансформатор ВТ-Д), а ротор другого с исполнительной осью (вращающийся трансформатор ВТ-П), формирует на выходе переменное напряжение UУ. Амплитуда напряжения
пропорциональна разности заданного угла поворота θ3 ротора ВТ-Д и
текущего значения угла поворота θвых ротора ВТ-П, соединенного с валом рабочего органа РО. Напряжение UУ усиливается предварительным усилителем переменного тока У1 и демодулируется (преобразуется) в постоянное напряжение величина которого пропорциональна амплитуде UУ, а знак

38
Табл. 2.1.
Параметры |
|
|
Варианты значений параметров |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
КПУ |
2 |
2 |
2 |
2 |
2 |
1 |
1 |
1 |
1 |
1 |
|
КТП |
30 |
30 |
30 |
35 |
35 |
35 |
35 |
40 |
40 |
40 |
|
КТГ, B ×с |
0,1 |
0,1 |
0,1 |
0,1 |
|
0,1 |
0,2 |
0,2 |
0,2 |
0,2 |
0,2 |
|
|
|
|
|
|
|
|
|
|
|
|
КД , (В× с)−1 |
1,25 |
1,4 |
1,2 |
1,35 |
|
1,5 |
1,45 |
1,1 |
1,15 |
1,3 |
1,6 |
|
|
|
|
|
|
|
|
|
|
|
|
КДВ, |
0,3 |
0,3 |
0,3 |
0,3 |
|
0,3 |
0,4 |
0,4 |
0,4 |
0,4 |
0,4 |
(Н × м × с)−1 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ТТП , с×10−3 |
8 |
8 |
8 |
7 |
|
7 |
6 |
6 |
5 |
5 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
ТЯ , с×10−3 |
12 |
12 |
24 |
24 |
|
36 |
36 |
48 |
48 |
36 |
24 |
ТЭМ , с×10−3 |
56 |
48 |
48 |
36 |
|
36 |
38 |
36 |
48 |
56 |
36 |
|
|
|
|
|
|
|
|
|
|
|
|
~UC
|
θВЫХ |
|
|
|
|
ОВД |
|
|
|
|
|
|
|
|
|
|
|
UУ |
|
|
|
θ Д |
θ ВЫХ |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
θ3 |
|
У1 |
U |
1 |
У2 |
UД |
РО |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МС |
Ред |
ВТ-Д |
ВТ-П |
~UC |
|
|
|
|
|
|
|
Рис. 2.2. |
|
|
|
|
|
определяется знаком рассогласования. Усилитель мощности У2 из выходного сигнала демодулятора формирует напряжение UД питающее якорную цепь исполнительного двигателя постоянного тока независимого возбуждения М. Вал исполнительного двигателя через редуктор соединен с валом рабочего органа.

39
Управляющее воздействие - угол поворота θ3 ротора вращающегося
трансформатора ВТ-Д. Управляемая величина - угол поворота θ вых оси
рабочего органа РО. Возмущающее воздействие - момент статических сопротивлений МС, приведенный к валу двигателя.
Связь между входными и выходными переменными каждого из элементов системы характеризуется следующими уравнениями:
Измеритель рассогласования:
U у = K uΔθ,
где КИ - крутизна характеристики (коэффициент передачи) измерителя рассогласования в линейной зоне; Δθ = θЗ − θВЫХ - ошибка слежения
(рассогласования), усилитель У1 совместно с демодулятором:
dU
T1 dt1 + U1 = K1UУ ,
где К1 и Т1 – коэффициент усиления и постоянная времени усилителя У1; усилитель мощности У2:
UД = К2U1,
где К2 – коэффициент передачи усилителя мощности, исполнительный двигатель:
TЭМ d2θД + dθД = KДUД ± КДВМС ,
dt dt
где ТЭМ – электромеханическая постоянная времени двигателя; КД, КДВ – коэффициент передачи двигателя по управлению и возмущению соответственно;
редуктор:
θ |
|
= |
1 |
θ |
|
, |
вых |
|
Д |
||||
|
|
iΡ |
|
|||
|
|
|
|
|
||
где iΡ - передаточное число редуктора.
Варианты значений параметров элементов системы приведены в табл. 2.2. 3. Задана функциональная схема автоматической системы стабилизации
напряжения генератора (рис. 2.3.).

|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.2. |
||
Параметры |
|
|
Варианты значений параметров |
|
|
|||||||||
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
Кu, в |
рад |
|
|
10 |
15 |
20 |
25 |
30 |
35 |
40 |
35 |
30 |
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К1 |
|
|
|
80 |
70 |
60 |
50 |
40 |
30 |
60 |
50 |
40 |
30 |
|
К2 |
|
|
|
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
iР |
|
|
|
40 |
40 |
50 |
50 |
50 |
50 |
40 |
40 |
40 |
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
КД , (В× с)−1 |
0,5 |
0,5 |
0,2 |
0,2 |
0,2 |
0,2 |
0,4 |
0,4 |
0,6 |
0,6 |
||||
КДВ , (Н× м× с) |
0,3 |
0,3 |
0,3 |
0,3 |
0,3 |
0,3 |
0,3 |
0,3 |
0,3 |
0,3 |
||||
Т1, с×10−2 |
|
2 |
2,5 |
3 |
3,5 |
4 |
2 |
2,5 |
3 |
3,5 |
4 |
|||
Т |
ЭМ |
, с Т |
эм |
, с |
0,2 |
0,25 |
0,3 |
0,35 |
0,4 |
0,45 |
0,45 |
0,5 |
0,5 |
0,55 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
ОВ |
|
|
RH |
U |
У |
Uу |
ТП |
Uов |
Г |
Uг |
|
|
|
||||||
R |
|
|
|
|
|
|
RH |
U3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uос |
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
Рис. 2.3 |
|
|
|
|
Напряжение обратной связи UОС, снимаемое с потенциометра R1, |
|||||||
сравнивается с управляющим напряжением U3, которое определяет заданное |
|||||||
напряжение генератора. Разность этих напряжений |
U поступает |
на вход |
|||||
промежуточного усилителя У, а затем, на тиристорный преобразователь ТП. |
|||||||