

15. Реакция линейной замкнутой системы на внешние воздействия. Ду замкнутой системы. Пример
Дано: Передаточные функции предварительно невозбужденной замкнутой системы Ф(р); Фf(p); Фs(p) и математические модели внешних воздействий v(t); f(t); s(t).
 Требуется
найти
реакцию замкнутой системы y(t).
Требуется
найти
реакцию замкнутой системы y(t).
Используя принцип суперпозиции (принцип наложения), согласно которому реакция линейной системы на несколько внешних воздействий, приложенных в разные точки структурной схемы, равна сумме реакций на каждое из внешних воздействий, взятых в отдельности, искомую реакцию можем записать как
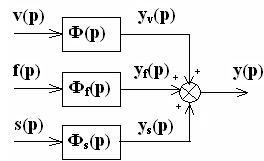
y(t)=yv(t)+yf(t)+ys(t), где yv(t), yf(t), ys(t) – соответственно реакции замкнутой системы на отдельно взятые задающее воздействие v(t), возмущающее воздействие f(t) и шум измерения s(t). Отсюда преобразование Лапласа у(р) реакции y(t) равняется сумме преобразований Лапласа yv(р), yf(р), ys(р) реакций yv(t), yf(t), ys(t), т.е. y(р)=yv(р)+yf(р)+ys(р).
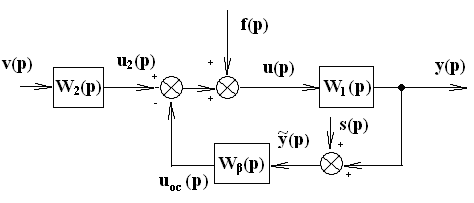
В соответствии с Ф(р)= , Фf(р)= и Фs(р)= преобразование реакции у(р)=Ф(р)v(p)+Фf(р)f(p)+Фs(p)s(p) (7) , где ПФ замкнутой системы можно определить с помощью структурных схем, представленных на рис.1 и рис. 2. Структурная схема системы, соответствующая уравнению (7) приведена на рисунке справа.
Определяя обратное преобразование Лапласа от (7), находим y(t)=L-1[y(p)]. В частности, используя теорему об изображении интеграла свертки, получаем реакции
![]()
 ,
,
где k(t)=L-1[Ф(p)] – весовая функция замкнутой системы.
![]() ,
,
где
kf(t)=
L-1[![]() ]
– весовая функция по возмущающему
воздействию.
]
– весовая функция по возмущающему
воздействию.
![]() ,
где ks(t)
=L-1[
,
где ks(t)
=L-1[![]() ]
– весовая функция по шуму измерения.
]
– весовая функция по шуму измерения.
Дифференциальное уравнение замкнутой системы.
ДУ системы – это уравнение, связывающее между собой y(t) c v(t), f(t), s(t). ДУ можно определить с помощью структурной схемы (рис. 1) по известным ПФ ее звеньев. Предположим, что найдены в виде отношения многочленов
ПФ ОУ
![]() ,
ПФ прямой связи
,
ПФ прямой связи
![]() , ПФ ОС
, ПФ ОС
![]() .
.
При этом 1+W(p)=1+![]() ,
где
,
где
Д(р) =
![]() +
+![]() (8).
(8).
В соответствии с (2), ПФ по задающему воздействию
![]() .
(9)
.
(9)
В соответствии с (4) ПФ по возмущающему воздействию
![]() .
(10)
.
(10)
В соответствии с (6) ПФ по шуму измерения
 .
(11)
.
(11)
Если числители этих ПФ не содержат общих делителей со знаменателем Д(р), то Д(р) – характеристический многочлен замкнутой системы.
Пример.
![]() ;
Д(р)=
;
Д(р)=
![]() ,
а р+1≠Д(р).
,
а р+1≠Д(р).
Из (7) с учетом (9-11) после умножения на Д(р) получаем уравнение замкнутой системы в изображениях
Д(р)y(р)=K1(р)K2(р)v(р)+K1(р)D2(р)f(p) - K1(р)Kβ(р)s(p). (12)
Если правая часть равна нулю, то Д(р)y(р)=0 – уравнение замкнутой автономной системы в изображениях. Заменяя в (12) изображения сигналов оригиналами и многочлены от р операторными многочленами, получаем дифференциальное уравнение замкнутой системы, записанное в операторной (символической) форме Д(D)y(t)=K1(D)K2(D)v(t)+K1(D)D2(D)f(t) - K1(D)Kβ(D)s(t) (13), где
D – оператор дифференцирования.
Пример.
Пусть ПФ ![]() ,
,
![]() ,
,
![]() .
.
Пусть S=0. В этом случае
K1(p)=
![]() ;
K2(p)=k2(T2p+1);
;
K2(p)=k2(T2p+1);
![]() =k3(T3p+1);
D1(p)=T1p+1;
D2(p)=p.
=k3(T3p+1);
D1(p)=T1p+1;
D2(p)=p.
Согласно
(8) Д(р)=
+![]() =(
T1p+1)р+
k1k3(T3p+1)=T1p2+(1+k1k3T3)p+k1k3.
=(
T1p+1)р+
k1k3(T3p+1)=T1p2+(1+k1k3T3)p+k1k3.
В соответствии с (12) и (13) находим уравнение замкнутой системы в изображениях
[T1p2+(1+k1k3T3)p+k1k3]y(p)=k1k2(T2p+1)v(p)+k1pf(p),
в операторной форме
[T1D2+(1+k1k3T3)D+k1k3]y(t)=k1k2(T2D+1)v(t)+k1Df(t)
и в оригиналах
![]()