

66. Методы робастного управления
Робастное
управление можно трактовать как
управление, которое обеспечивает, как
минимум, робастную устойчивость и
робастное качество. Каким путем можно
найти ПФ регулятора W2(p),
который гарантирует робастное качество
при заданных функциях веса качества и
неопределенности (устойчивости)
и
![]() ,
и известной ПФ номинального объекта
W1(p)?
Существуют несколько методов решения
этой проблемы. Здесь мы ограничимся
обсуждением лишь одного из них, который
связан с пересмотром ранее рассмотренного
метода проектирования системы путем
формирования частотных характеристик
разомкнутой системы. Прежде всего,
запишем критерий робастного качества
в рамках АФХ разомкнутой системы
,
и известной ПФ номинального объекта
W1(p)?
Существуют несколько методов решения
этой проблемы. Здесь мы ограничимся
обсуждением лишь одного из них, который
связан с пересмотром ранее рассмотренного
метода проектирования системы путем
формирования частотных характеристик
разомкнутой системы. Прежде всего,
запишем критерий робастного качества
в рамках АФХ разомкнутой системы
![]() .
(15)
.
(15)
Вспомним,
что на низких частотах АЧХ разомкнутой
системы
![]() принимает
достаточно большие значения, так что
при
принимает
достаточно большие значения, так что
при
![]()
![]() .
.
Тогда из (15) следует
![]()
![]() .
.
Отсюда
![]() ,
.
(16)
,
.
(16)
На
высоких частотах АЧХ разомкнутой системы
принимает
близкие к нулю значения, так что при
![]()
![]() .
.
Тогда из (15) получаем
![]()
![]()
![]() .
.
Таким образом,
![]() ,
.
(17)
,
.
(17)
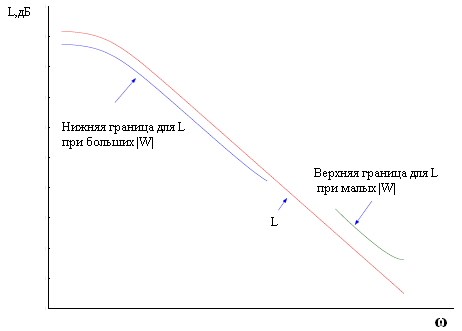
Следовательно, уравнения (16) и (17) обеспечивают явное условие (рис. 15) для использования при формировании желаемого вида ЛАЧХ разомкнутой системы L( )=20lg|W(j )|, которое осуществляется обычно методом проб и ошибок, В результате получаем ПФ спроектированной разомкнутой системы
W(p)= W2(p)W1 (p).
Здесь W1 (p) – ПФ номинального ОУ.
67. Устойчивость по входу.
Два вида устойчивости представляют интерес. Первый вид относится к способности системы возвращаться в прежнее состояние равновесия после устранения причины, вызвавшей это отклонение, а другой вид относится к способности системы вырабатывать ограниченный выходной сигнал как реакцию на ограниченный входной сигнал. Способность предварительно возбужденной системы возвращаться в нулевое состояние равновесия (устойчивость по начальным условиям) связана с ее свободным движением.
При этом независимо от того, как велико
начальное состояние,
![]() при
при
![]() .
Такую систему называют часто асимптотически
устойчивой.
.
Такую систему называют часто асимптотически
устойчивой.
Устойчивость второго вида: устойчивость
«ограниченный вход – ограниченный
выход» определяется при нулевых начальных
условиях посредством интеграла свертки
![]() ,
,
где
![]() является весовой функцией замкнутой
системы,
является весовой функцией замкнутой
системы,
![]() -
вынужденное движение предварительно
невозбужденной системы. В данном случае
мы рассматриваем устойчивость по
задающему воздействию v(t),
полагая, что возмущение и шум измерения
отсутствуют.
-
вынужденное движение предварительно
невозбужденной системы. В данном случае
мы рассматриваем устойчивость по
задающему воздействию v(t),
полагая, что возмущение и шум измерения
отсутствуют.
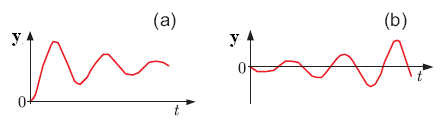
a) система устойчивая по входу, b) система неустойчивая по входу.
Легко показать, что
 .
.
Пусть значения входа v(t)
ограничены, т. е. существует постоянная
величина с такая, что
![]() для всех t. При
этом
для всех t. При
этом
 .
.
Отсюда выходной сигнал будет ограниченным для всех t, если выполняется условие
 .
.
Вывод. Для устойчивости системы типа «ограниченный вход – ограниченный выход» необходимо и достаточно, чтобы ее весовая функция была абсолютно интегрируема.
Нетрудно показать, что это условие выполняется, если система с одним входом и одним выходом устойчива по начальным условиям. Действительно, весовая функция k(t) связана с ПФ Ф(p) замкнутой системы соотношением
k(t)
=L-1[Ф(p)]
=
![]() ,
,
где
![]() -
корни характеристического уравнения
замкнутой системы
-
корни характеристического уравнения
замкнутой системы
![]() =0,
другими словами, полюсы ПФ
=0,
другими словами, полюсы ПФ
![]() .
Если имеет место асимптотическая
устойчивость (устойчивость по начальным
условиям), то
.
Если имеет место асимптотическая
устойчивость (устойчивость по начальным
условиям), то
![]() ,
что гарантирует устойчивость по входу.
,
что гарантирует устойчивость по входу.
68 Оценка качества переходного процесса по ЛЧХ разомкнутой системы
Запасы устойчивости по фазе
![]() и амплитуде
и амплитуде
![]() ,
а также частота среза wc
могут быть найдены с помощью ЛЧХ L(w)
и
,
а также частота среза wc
могут быть найдены с помощью ЛЧХ L(w)
и
![]() разомкнутой системы. Поэтому все выводы
предыдущего раздела, касающиеся вопроса
об оценке качества системы с помощью
величин
,
1/h, wc,
справедливы и в данном случае. Так,
приемлемый запас устойчивости по
амплитуде
разомкнутой системы. Поэтому все выводы
предыдущего раздела, касающиеся вопроса
об оценке качества системы с помощью
величин
,
1/h, wc,
справедливы и в данном случае. Так,
приемлемый запас устойчивости по
амплитуде
![]() определяется рекомендуемыми значениями
1/h и лежит в пределах
10-15 дБ.
определяется рекомендуемыми значениями
1/h и лежит в пределах
10-15 дБ.
Замечание. Перерегулирование обычно более чувствительно к запасу устойчивости по фазе, чем к запасу устойчивости по модулю, т.к. в первом случае разомкнутая система имеет больший коэффициент усиления. Поэтому требования к колебательности системы могут быть заданы в виде одного запаса устойчивости по фазе .
С помощью ЛЧХ можно получить более точную оценку качества минимально-фазовых систем.
Как известно, в минимально-фазовых системах существует однозначная связь между логарифмическими амплитудной L(w) и фазовой характеристиками. Поэтому о свойствах таких систем можно судить, лишь зная одну из этих характеристик. В теории автоматического управления применяют обычно характеристику L(w), имея в виду простоту ее построения.
В основу суждения о поведении замкнутой системы положено понятие типовой ЛАЧХ L(w).
Если ЛАЧХ разомкнутой системы удовлетворяет следующим трем условиям:
- значения ЛАЧХ в низкочастотной области относительно велики с целью обеспечения малой величины установившейся ошибки;
- значения ЛАЧХ в высокочастотной области относительно малы с целью уменьшения влияния высокочастотных помех;
- наклон ЛАЧХ в области средних частот [0,4wc;4wc] примерно равен -20дБ/дек, то справедливы следующие соотношения, связывающие показатели качества
![]() .
.
Здесь М – показатель колебательности,
![]() - полоса пропускания, определяемая
диапазоном частот, в котором АЧХ замкнутой
системы больше или равна единице.
- полоса пропускания, определяемая
диапазоном частот, в котором АЧХ замкнутой
системы больше или равна единице.
При этом относительный коэффициент затухания и собственная частота колебания w0, соответствующие паре ближайших к мнимой оси комплексно-сопряженных полюсов замкнутой системы (доминирующих полюсов), определяются как
![]()
Оценка качества системы по этим формулам обеспечивает достаточную для практики точность. Так частота wc косвенно характеризует длительность переходного процесса. Время переходного процесса tp≈3/wc при 5% допустимой ошибке обратно пропорционально частоте среза.
Особо отметим, что для малой колебательности (большого запаса устойчивости) системы необходимо, чтобы частота среза wc приходилась на участок характеристики L(w) с наклоном -20дБ/дек. Причем, чем шире участок с наклоном -20дБ/дек, тем больше запасы устойчивости системы при прочих равных условиях.
69.Оценка качества по функции чувствительности и дополнительной функции чувствительности.
В последнее время для суждения о свойствах САУ используют совместно модуль функции чувствительности |S( )| и модуль дополнительной функции чувствительности |T( )|, другими словами АЧХ |Ф( )| замкнутой системы.
1. Критерии максимальных значений (оценка колебательности и робастности)
При этом качество системы оценивают по максимальным значениям функции чувствительности и дополнительной функции чувствительности:
; .
Заметим,
что постоянному значению |S|
=const
на плоскости АФХ разомкнутой системы
![]() cоответствует
окружность радиусом a=1/|S|
c
центром в точке с координатами (-1, j0)
(рис. ниже). Действительно
cоответствует
окружность радиусом a=1/|S|
c
центром в точке с координатами (-1, j0)
(рис. ниже). Действительно
![]() .
Отсюда
.
Отсюда
![]() .
.
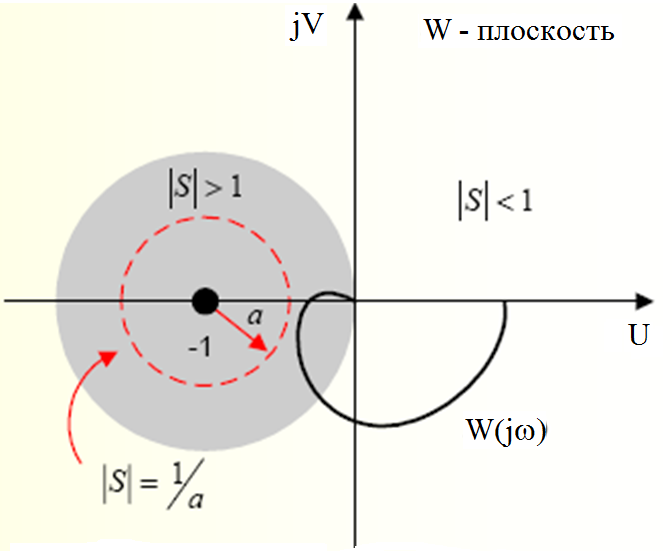
Следовательно, величина (см. рис. ниже) определяет наименьшее расстояние от АФХ разомкнутой системы до критической точки (-1,j0), тем самым определяет запасы устойчивости (робастность) замкнутой системы, а также – величину перерегулирования и колебательность системы.
Рекомендуемые значения:
, .
Если максимумы удовлетворяют этим рекомендациям, то показано, что запасы устойчивости определяются неравенствами
 ,
Например,
для
,
Например,
для
![]() =2
мы гарантируем
=2
мы гарантируем
![]() и
и
![]() .
.
2. Полоса пропускания и частота среза (оценка быстродействия)
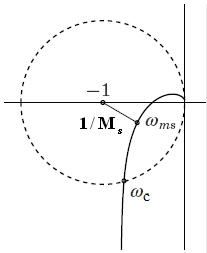
Определим полосу пропускания замкнутой системы с помощью частоты , которая соответствует частоте, при которой первый раз пересекает прямую снизу.
Как известно, полосу пропускания замкнутой системы в рамках T определяют с помощью частоты , т.е. самой большой частоты, при которой пересекает прямую сверху (см. рисунок ниже).
Для
систем с запасом устойчивости по фазе
![]() мы имеем
мы имеем
< < ,
где - частота среза, при которой АЧХ разомкнутой системы пересекает 1 (0 дБ) сверху.
70. ПИД-регуляторы. Основные характеристики и настройка.
ПИД-регулятор или
пропорционально-интегро-дифференциальный
регулятор представляет собой комбинацию
пропорционального П,
интегрального И
и дифференциального Д
управлений:
![]() ,
где коэффициенты KP,
KI
и
KD
являются параметрами, подлежащими
настройке для конкретного приложения.
Во временной области ПИД-регулятор
описывается уравнением
,
где коэффициенты KP,
KI
и
KD
являются параметрами, подлежащими
настройке для конкретного приложения.
Во временной области ПИД-регулятор
описывается уравнением
![]() .
.
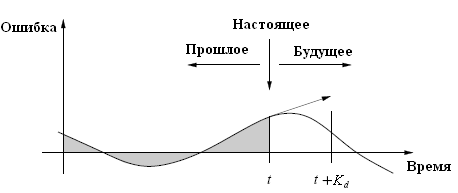 На рисунке показано действие
ПИД-регулятора. В настоящий момент
времени t
пропорциональное управление зависит
от мгновенного значения ошибки
На рисунке показано действие
ПИД-регулятора. В настоящий момент
времени t
пропорциональное управление зависит
от мгновенного значения ошибки
![]() и обеспечивает
высокое быстродействие и уменьшает
установивш. ош.. Интегральное управл.
базируется на интеграле от ошибки
(затененная область)
и обеспечивает
высокое быстродействие и уменьшает
установивш. ош.. Интегральное управл.
базируется на интеграле от ошибки
(затененная область)
![]() ,
т.е. учитывает прошлое поведение ош., и
повышает порядок астатизма системы по
задающему воздействию и по возмущающему
воздейств., приложенному как на вход,
так и на выход ОУ. Часто даже при ОУ,
включающем интеграторы, использ. с целью
обеспечить нулевую установивш. ошибку
при постоянных возмущениях
,
т.е. учитывает прошлое поведение ош., и
повышает порядок астатизма системы по
задающему воздействию и по возмущающему
воздейств., приложенному как на вход,
так и на выход ОУ. Часто даже при ОУ,
включающем интеграторы, использ. с целью
обеспечить нулевую установивш. ошибку
при постоянных возмущениях
Интуитивное
обоснование для применения дифференциального
управл. (управл. по производной от ош.
![]() )
состоит в том, что если видно, что управл.
величина системы y(t)
изменяется с высокой скоростью, то можно
значительно ускорить реакцию регулятора
(управление) путем предсказания возможного
отклонения этой управл. величины, и
оказать противодействие незамедлительно
(если v(t)=const,
то
)
состоит в том, что если видно, что управл.
величина системы y(t)
изменяется с высокой скоростью, то можно
значительно ускорить реакцию регулятора
(управление) путем предсказания возможного
отклонения этой управл. величины, и
оказать противодействие незамедлительно
(если v(t)=const,
то
![]() ).
Коэфф. Kd
приближенно
равен промежутку времени, на к.
прогнозируется ош., т.к. на основании
формулы для ряда Тейлора
).
Коэфф. Kd
приближенно
равен промежутку времени, на к.
прогнозируется ош., т.к. на основании
формулы для ряда Тейлора
![]() .
.
Управление по
производной зашумляет систему (делает
систему чувствительной к помехам), но
управление по производной обладает
рядом достоинств и в силу того, что
ложной реакции на шум можно избежать
за счет принятия некоторых мер,
отказываться от его использов. (управления
по производной), по меньшей мере,
неправильно. Для того, чтобы лучше понять
особенности Д-
управления, мы напомним, что для
дифференциальной составляющей с ПФ
![]() (идеального дифференцирующего звена)
АЧХ имеет вид
(идеального дифференцирующего звена)
АЧХ имеет вид
![]() .
Линейная зависимость от
означает, что реакция регулятора
возрастает с увеличением частоты
входного сигнала. Это объясняет, почему
высокочастотный шум датчика может
создать большое управл.. Очевидное
решение - ограничить составляющую,
обусловленную Д-управлением,
добавив в закон управления низкочастотный
фильтр с сопрягающей частотой
.
Линейная зависимость от
означает, что реакция регулятора
возрастает с увеличением частоты
входного сигнала. Это объясняет, почему
высокочастотный шум датчика может
создать большое управл.. Очевидное
решение - ограничить составляющую,
обусловленную Д-управлением,
добавив в закон управления низкочастотный
фильтр с сопрягающей частотой
![]() ,
чтобы получить ПФ
,
чтобы получить ПФ
![]()
Практически ни одно исполнительное устройство не может реагировать на сигналы большой величины на произвольно высоких частотах, добавляем мы фильтр или нет. Однако, если выше, чем полоса пропускания системы, фильтр оказывает малое влияние на динамические свойства системы, в то же время ограничивает влияние шума датчика.
Выбор параметров ПИД-регулятора:
Настраиваем Kp так, чтобы получить требуемую частоту среза или установившуюся ошибку воспроизведения.
Если необходимо, используем Д-управление, чтобы повысить ФЧХ в окрестности частоты среза с целью увеличить запас устойчивости по фазе.
Если необходимо, используем И-управление, чтобы поднять АЧХ на низких частотах с целью добиться требуемой точности в установившемся режиме.
Однако примененение ПИД-регуляторов в общем случае ограничивается объектами второго порядка. Если объект управления имеет более высокий порядок, ПИД-регуляторы не всегда могут обеспечить удовлетворительное управление. Общий подход - выбор регулятора произвольной формы.