

34. Коррекция с помощью ку с отставанием по фазе
а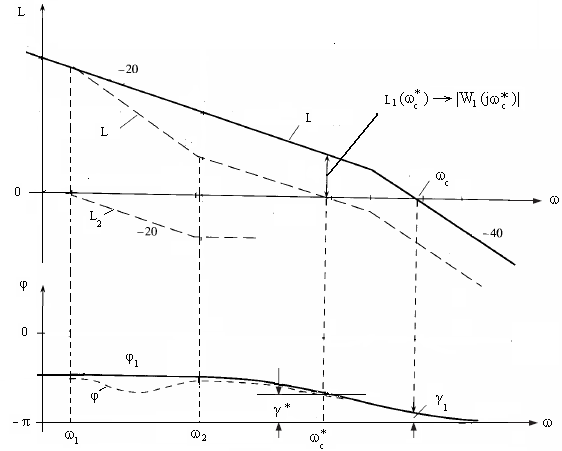 )
КУ с отставанием по фазе
)
КУ с отставанием по фазе
ПФ имеет тот же вид, что и для КУ с опережением по фазе:
,
однако α>1.
Найдем сопрягающие частоты 1=1/αT, 2=1/T, причем 2> 1 .
Параметры КУ:
q1=T, q2=α, q3=k2, α>1,
Положим k2=1.
ЛЧХ КУ с опережением по фазе L2( ), φ2( ) (см. рисунок ниже) представляют собой зеркальное отображение относительно оси частот ЛЧХ КУ с отставанием по фазе.
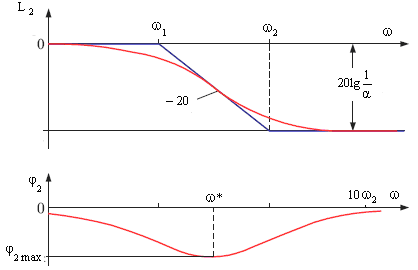
При этом φ2(10 2)=-5о (см. на рис. выше с учетом логарифмического масштаба частот).
Как видим, это устройство добавляет отрицательный сдвиг по фазе.
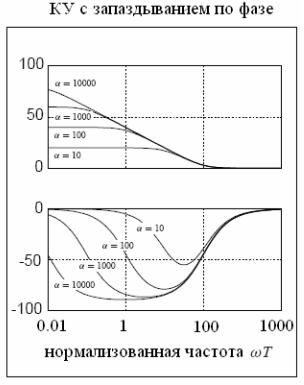
Параметры α и Т надо выбрать таким образом, чтобы система удовлетворяла заданным требованиям k* и γ*. Выберем k1=k* для обеспечения требуемой точности. Точные ЛЧХ КУ с запаздыванием для k2= α изображены на рисунке ниже.
б) Выбор параметров α и Т корректирующего устройства с отставанием по фазе.
1. Построить L1( ) и φ1( ) и проверить, удовлетворяет ли нескорректированная система требованиям, предъявляемым к запасу устойчивости по фазе. Если запас устойчивости γ1=180 о +φ1( c) недостаточен, перейти к п.2.
2. Выбрать частоту среза c* скорректированной системы, исходя из условия φ1( c*)=-π+γ*+5о. При этом учитываем (см. п.3 ниже), что на данной частоте КУ создает дополнительный фазовый сдвиг φ2( c*)=-5о, так что запас устойчивости скорректированной системы
γ=180 о +φ( c*)=π+φ1( c*)+φ2( c*)= γ*
будет равен требуемому значению.
3. Выбираем параметр Т=10/ c* из условия 2=0,1 c*, чтобы гарантировать, что КУ добавит только -5о к результирующей ЛФЧХ скорректированной системы на частоте c*.
4. Выбираем α=|W1(j c*)|, чтобы ЛАЧХ скорректированной системы пересекала ось частот при c*. Действительно, при этом
L( c*) =L1( c*)+L2( c*)=20lg|W1(j c*)|+20lg|W2(j c*)|=
=20lgα+20lg(1/α)=0.
Теперь можно найти 1= 2/α.
5. Используя L=L1+L2, φ=φ1+φ2, построим ЛЧХ скорректированной системы.
Здесь L1, φ1 – ЛЧХ нескорректированной системы
Так как k=k1=k*, то вид L( ) в области низких частот удовлетворяет заданным требованиям к точности системы.
Если
![]() ,
то процедура выбора параметров
заканчивается.
,
то процедура выбора параметров
заканчивается.
Достоинства:
1. Удалось обеспечить требуемое значение коэффициента усиления k=k* в области низких частот, уменьшает статическую ошибку.
2. Повышает запасы устойчивости.
3. c* < c – введение этого устройства повышает помехоустойчивость.
Недостатки:
1. Уменьшается полоса пропускания, следовательно, снижается быстродействие за счет того, что c*< c, затягивается переходный процесс.
2. Возникает проблема пи реализации КУ с отставанием по фазе с помощью RC-схемы, изображенной на рисунке ниже и описываемой ПФ
![]() ,
,
где
![]()
![]()

Дело в том, что при больших значениях Т, резистор R1 должен иметь номинал, превышающий десятки Мом. Это большая величина, поэтому проектировщику не рекомендуется выбирать частоту 2 КУ далее, чем на одну декаду левее частоты c*.
35. Уравнение звена в символической форме.
Уравнение звена, полученное в результате линеаризации
![]() (*),
(*),
где
![]() и
и
![]() - отклонения выхода и входа относительно
состояния равновесия (рабочей точки),
записывают в различном формате.
- отклонения выхода и входа относительно
состояния равновесия (рабочей точки),
записывают в различном формате.
Введем в рассмотрение
оператор дифференцирования
![]() ,
обладающий тем свойством, что его
умножение на любую функцию x(t)
= дифференцированию этой функции по
времени:
,
обладающий тем свойством, что его
умножение на любую функцию x(t)
= дифференцированию этой функции по
времени: ![]() .
.
Для любого целого
![]()
![]() .
.
Обозначая ради простоты записи , представим уравнение (*) так:
![]() (1),
(1),
тогда вводя операторные обозначения для производных входа и выхода, и затем вынося y и v за скобку, получаем операторную форму уравнения линейного звена в компактном виде
![]()
или еще короче (2), где
входной оператор
и выходной оператор
п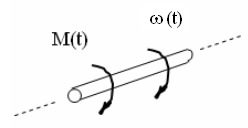 редставляют
собой операторные многочлены.
редставляют
собой операторные многочлены.
Пример. Рассмотрим вращающийся вал.
Введем следующие обозначения:
![]() - скорость вращения
вала, M(t)
– суммарный момент, приложенный к валу.
Пусть v(t)
~ M(t)
- вход, а
~ y(t)
– выход элемента.
- скорость вращения
вала, M(t)
– суммарный момент, приложенный к валу.
Пусть v(t)
~ M(t)
- вход, а
~ y(t)
– выход элемента.
Уравнение вала на
основании второго закона механики
(закона Ньютона) имеет вид:
![]() ,
где J
– момент инерции вала. Заменяя
,
где J
– момент инерции вала. Заменяя
![]() на D
,
получаем уравнение вала в операторной
форме
на D
,
получаем уравнение вала в операторной
форме
![]() .
.
Последнее уравнение представляет частный случай уравнения (2) для m=0, n=1.
Как видим, выходной оператор Д(D)=JD, а входной K(D)=1.
Очевидно, что
уравнение элемента зависит от того,
какие сигналы принимаются в качестве
выхода и входа. Так, если момент вращения
![]() - входной сигнал, то, полагая, что
- входной сигнал, то, полагая, что
![]() ,
,
где
![]() - момент вязкого трения, h
- коэффициент вязкого трения, то уравнение
вала принимает другой вид
- момент вязкого трения, h
- коэффициент вязкого трения, то уравнение
вала принимает другой вид
![]() или
или
![]() .
.
Отсюда Д(D)=JD+h, K(D)=1.
Наряду с операторной записью ДУ (1) в виде (2) будем использовать еще более компактную форму:
![]() или y(t)=W(D)v(t)
(3), где W(D)
называется операторной
передаточной функцией
(ОПФ) или оператором
звена.
или y(t)=W(D)v(t)
(3), где W(D)
называется операторной
передаточной функцией
(ОПФ) или оператором
звена.
Формально W(D) можно рассматривать как отношение двух многочленов от D: W(D)=K(D)/Д(D) (4) ,
которое условимся записывать, не производя никаких возможных сокращений. Запись (4) является символической и не дает решения ДУ (2), т.к. не определено, какой смысл имеет деление на операторный многочлен Д(D).