

13) 13. Параллельная работа гпт.
Для
параллельной работы генераторов
постоянного тока необходимо выполнить
следующие условия:
1. Напряжение
включаемого генератора должно быть
равно напряжению сети или напряжению
уже работающего генератора.
2.
Полярность соединяемых зажимов
включаемого генератора и сети должна
быть одинаковой (плюс генератора должен
быть соединен с плюсом сети и минус
генератора — с минусом сети).
Первое условие параллельной работы генераторов — равенство напряжений — выполняется следующим образом. Пускается в ход первичный двигатель, приводящий во вращение включаемый генератор, и его скорость вращения доводится до номинальной. Изменяя сопротивление регулировочного реостата генератора, устанавливают напряжение генератора равным напряжению сети или напряжению уже работающего генератора. Равенство напряжений проверяется по вольтметрам, подключенным к сети и генератору, или одним вольтметром с вольтметровым переключателем. Второе условие параллельной работы — совпадение полярностей— проверяется только для генератора, впервые включаемого на параллельную работу. Зажимы генератора располагают так, чтобы при повторных включениях это условие было заранее выполнено. Проверку полярности можно производить или при помощи магнитоэлектрического вольтметра или при помощи ламп накаливания. Любая пара зажимов сети и генератора при выключенном рубильнике машины замыкается перемычкой. К зажимам другой пары подключается вольтметр, рассчитанный на двойное напряжение сети. Если плюс сети совпадает с плюсом генератора, а минус сети с минусом генератора, то вольтметр покажет нуль.
При
неправильном включении вольтметр
покажет двойное напряжение.
Генератор,
включенный параллельно в сеть или
включенный с другим работающим
генератором, тока не дает, так как э. д.
с. генератора равна и противоположна
напряжению сети. Чтобы генератор стал
давать ток в сеть, нужно увеличить его
э. д. с. при помощи регулировочного
реостата.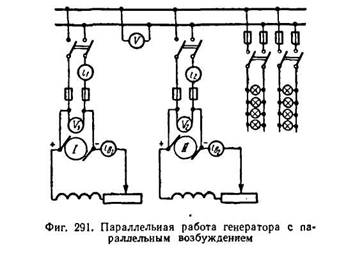
Ток, отдаваемый генератором в сеть, проходя по обмотке якоря генератора и взаимодействуя с магнитным потоком полюсов, создает момент сопротивления, противоположный моменту вращения первичного двигателя генератора. Поэтому с увеличением тока нагрузки механическая мощность первичного двигателя также должна увеличиваться. Для перевода нагрузки с одного генератора на другой необходимо одновременно менять сопротивление регулировочных реостатов, увеличивая ток возбуждения генератора, который нужно нагрузить, и уменьшая ток возбуждения генератора, который нужно разгрузить. Может случиться, что во время работы генератора э. д. с. его понизится (например, при уменьшении скорости первичного двигателя или при обрыве приводного ремня, приводящего генератор во вращение от первичного двигателя). В этом случае ток из сети пойдет в генератор и последний будет работать электрическим двигателем. Для предотвращения этого в цепи генератора устанавливают особые автоматы, которые выключают генератор, как только ток его изменит свое направление.
18) Двигатель с параллельным возбуждением. В этом двигателе (рис. 10.51, а) обмотка возбуждения подключена параллельно с обмоткой якоря к сети. В цепь обмотки возбуждения включен регулировочный реостат RpB, а в цепь якоря—пусковой реостат Rn. Характерная особенность двигателя— его ток возбуждения Iв не зависит от тока якоря
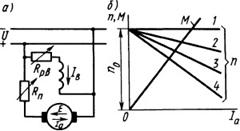 Рис.
10.51. Схема
двигателя с параллельным возбуждением
(а) и его мо-
Рис.
10.51. Схема
двигателя с параллельным возбуждением
(а) и его мо-
ментная и скоростная характеристики (б)
1а (тока нагрузки), так как питание обмотки возбуждения по существу независимое. Следовательно, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя не зависит от нагрузки. При этом условии, согласно (10.45) и (10.46), получаем, что зависимости M=f(Ia) и n = f(la) (моментная и скоростная характеристики)линейные (рис. 10.51,б). Следовательно, линейная и механическая характеристика двигателя n = f(M) (рис. 10.52, а).
Если в цепь якоря включен добавочный резистор или реостат Rn,то
п = [U-Iа(ΣRа + RП)]/(сеФ) = п0-Δп, (10.47)
где по=U/(сеФ) — частота вращения при холостом ходе; Δп = (ΣRа +Rп)1а/(сеФ) — снижение частоты, обусловленное суммарным падением напряжения во всех сопротивлениях, включенных в цепь якоря двигателя.
В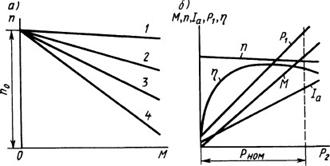 еличина Δn, зависящая
от суммы сопротивлений ΣRа + + RП,
определяет наклон скоростной n = f(Iа)и
механической n = f(M) характеристик
к оси абсцисс. При отсутствии в цепи
якоря добавочного сопротивления Rnуказанные
характеристики жесткие (естественные
характеристики 1 на
рис. 10.51,б и 10.52, а), так
как падение напряжения 1аΣRа в
обмотках машины,
включенных в цепь
якоря, при
еличина Δn, зависящая
от суммы сопротивлений ΣRа + + RП,
определяет наклон скоростной n = f(Iа)и
механической n = f(M) характеристик
к оси абсцисс. При отсутствии в цепи
якоря добавочного сопротивления Rnуказанные
характеристики жесткие (естественные
характеристики 1 на
рис. 10.51,б и 10.52, а), так
как падение напряжения 1аΣRа в
обмотках машины,
включенных в цепь
якоря, при
Рис. 10.52. Механические (а) и рабочие (б) характеристики
двигателя с параллельным возбуждением
номинальной нагрузке составляет лишь 3...5% от UHOM. При включении добавочного реостата угол наклона этих характеристик возрастает, вследствие чего образуется семейство реостатных характеристик 2, 3, 4,соответствующих различным сопротивлениям реостата Rnl, Rn2 и Rn3. Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Реакция якоря, уменьшая несколько поток машины Φ при нагрузке, стремится придать естественной механической характеристике отрицательный угол наклона, при котором частота вращения η возрастает с увеличением момента М. Однако двигатель с такой характеристикой в большинстве электроприводов устойчиво работать не может. Поэтому современные двигатели большой и средней мощностей с параллельным возбуждением часто имеют небольшую последовательную обмотку возбуждения, которая придает механической характеристике необходимый наклон. МДС этой обмотки при токе Iном составляет около 10% от МДС параллельной обмотки.
Регулировочный реостат Rp.B позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. Как следует из (10.46), при этом изменяется и частота вращения п. В цепь обмотки возбуждения выключатели и предохранители не устанавливают, так как при разрыве этой цепи и небольшой нагрузке на валу частота вращения двигателя резко возрастает (двигатель идет в «разнос»). При этом сильно увеличивается ток якоря и может возникнуть круговой огонь.
Рабочие
характеристики рассматриваемого
двигателя (рис. 10.52,6) представляют собой
зависимости потребляемой
мощности Ρ1, тока Ια![]() Iн,
частоты вращения n,
момента Μ и
КПД η от
отдаваемой мощности Р2 на
валу двигателя при U=const и IB = const.
Характеристики n = f(Р2)
и М = f(Р2)
являются линейными, а
зависимости Ρι = f(Ρ2), Ia = f(P2) и η = f(P2) имеют
характер общий для всех электрических
машин. Иногда рабочие характеристики
строят в зависимости от тока
якоря 1а.
Iн,
частоты вращения n,
момента Μ и
КПД η от
отдаваемой мощности Р2 на
валу двигателя при U=const и IB = const.
Характеристики n = f(Р2)
и М = f(Р2)
являются линейными, а
зависимости Ρι = f(Ρ2), Ia = f(P2) и η = f(P2) имеют
характер общий для всех электрических
машин. Иногда рабочие характеристики
строят в зависимости от тока
якоря 1а.
Если в двигателе обмотка якоря и обмотка возбуждения подключены к источникам питания с различными напряжениями, то его называют двигателем с независимым возбуждением. Такие двигатели применяют в электрических приводах, у которых питание обмотки якоря осуществляется от генератора или полупроводникового преобразователя. Механические и рабочие характеристики двигателя с независимым возбуждением аналогичны характеристикам двигателя с параллельным возбуждением, так как у них ток возбуждения Iв также не зависит от тока якоря 1а.
1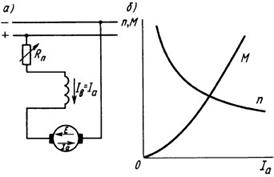 9)
Двигатель
с последовательным возбуждением.
В этом двигателе (рис. 10.53,а) ток
возбуждения Iв = Iа,
поэтому
9)
Двигатель
с последовательным возбуждением.
В этом двигателе (рис. 10.53,а) ток
возбуждения Iв = Iа,
поэтому
Рис. 10.53. Схема двигателя с последовательным возбуждением (а) и его моментная и
скоростная характеристики (б)
магнитный
поток Ф является некоторой функцией
тока якоря 1а. Характер
этой функции изменяется в зависимости
от нагрузки двигателя. ПриIа<(0,8...0,9)Iном,
когда магнитная система машины не
насыщена, Ф = kфIа,
причем коэффициент пропорциональности kф в
значительном диапазоне нагрузок остается
практически постоянным. При дальнейшем
возрастании тока якоря поток Ф возрастает
медленнее, чем Iа,
при больших нагрузках(Iа>IНОМ)
можно считать, что Ф![]() const.
В соответствии с этим
изменяются зависимости
n = f(Ia) и M = f(Ia).
const.
В соответствии с этим
изменяются зависимости
n = f(Ia) и M = f(Ia).
При /а<(0,8...0,9)/ном скоростная характеристика двигателя n = f(la) (рис. 10.53,6) имеет форму гиперболы, так как частота вращения
![]() (10.48)
(10.48)
где С1 и С2 — постоянные.
При 1а > Iном скоростная характеристика становится линейной, так как частота вращения
![]() (10.49)
(10.49)
где С'1 и С'2 — постоянные.
Аналогично можно получить зависимость электромагнитного момента от тока якоря M=f(la). При Iа<(0,8...0,9)Iн* *Iном моментная характеристикаM=f(Ia) имеет форму параболы (рис. 10.53,б), так как электромагнитный момент
М=смФIа = смкф12а = С312а, (10.50)
где С3 — постоянная.
При Ia>IHOM моментная характеристика линейная, так как
 Рис.
10.54. Механические
(а) и рабочие (б)
характеристики двигателя
Рис.
10.54. Механические
(а) и рабочие (б)
характеристики двигателя
с последовательным возбуждением
М=смФ1а = С'31а, (10.51)
где С'з — постоянная.
Механические характеристики n = f(M) (рис. 10.54, а) можно построить на основании зависимостей n = f(la) и М= f(la). При Iа<(0,8...0,9)Iном частота вращения изменяется по закону
![]() (10.52)
(10.52)
где С4 — постоянная.
При Ia>Iном зависимость n = f(M) становится линейной.
Включая в цепь якоря пусковые реостаты с сопротивлениями Rnl9 Rn2и Rn3 кроме естественной характеристики 1 можно получить семейство реостатных характеристик 2, 3 и 4, причем, чем больше Rn, тем ниже располагается характеристика.
Рабочие характеристики двигателя с последовательным возбуждением приведены на рис. 10.54,б. Зависимости n = f(P2), M=f(P2) являются нелинейными; зависимости P1 = f(P2)' Ia = f(P2) и η = f(P2) имеют примерно такой же характер, как и у двигателя с параллельным возбуждением.