

Содержание
Введение
1 Принципиальная электрическая схема и описание ее работы
1.1 Основные блоки схемы
2 Функциональная схема САУ и ее особенности
3 Структурная схема САУ
4 Передаточная и комплексно-частотная функцияСАУ
4.1 Магнитный усилитель и его передаточная и частотная характеристики
4.2 Станция управления инверторами и его передаточная и комплексно –
частотная функция
4.3 Задающий блок
4.4 Тахогенератор и его передаточная и комплексно – частотная функции
4.5 Асинхронный двигатель и его передаточная и комплексно –
частотная функции
4. 6 Режущая и подающая части угледобывающего комбайна
4.7 Передаточная и комплексно – частотная функции исполнительного органа
4.8 Передаточная и комплексно – частотная функция механизма
перемещения с редуктором
4.9 Передаточная и комплексно – частотная функция системы
5 Анализ устойчивости и определение граничного коэффициента усиления
5.1 Исследование САУпо критерий Гурвица
5.2 Исследование САУ по критерию Михайлова
5.3 Исследование устойчивости с помощью критерия D-разбиения
5.4 Определение статической номинальной и максимальной ошибок системы
6 Построение переходного процесса САУ
7 Синтез последовательного корректирующего устройства
Заключение
Перечень ссылок Приложение а
ВВЕДЕНИЕ
Увеличение объема промышленного производства, повышение производительности и улучшение условий труда при постоянном росте уровня техники безопасности являются одними из важнейших задач, решение которых без широкой автоматизации производства невозможно. В основе расчета и функционирования автоматических систем лежит теория автоматического управления.
Управление охватывает большой круг задач. Под автоматическим управлением понимается автоматическое осуществление совокупности воздействий, выбранных из ряда возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с заданным алгоритмом без непосредственного участия человека.
Объектами управления могут быть машины, механизмы, комплексы, добычные и подготовительные участки, передвижные и стационарные установки, конвейерные линии, коллективы людей, производственные предприятия.
В зависимости от объектов и задач управления системы управления могут быть различными от самых простых систем автоматического регулирования (САР), поддерживающие неизменной какую-либо величину, до сложных, содержащих десятки вычислительных машин и решающих задачи оптимального управления множеством объектов.
Одним из направлений технического процесса в угольной промышленности является широкое внедрение систем и средств автоматизации очистного оборудования и в первую очередь, очистных комбайнов.
Автоматизация режимов работы очистных комбайнов обеспечивает повышение их производительности благодаря более полному использованию энергетических возможностей электропривода и уменьшенную вероятности «опрокидывания» электродвигателей, повышение долговечности из-за снижения перегрузок электродвигателя и механической части и их аварийности; улучшает условия и повышает безопасность труда, так как позволяет обслуживающему персоналу выполнять основные операции, находясь в закрепленном пространстве на свежей струе, что входит в задачи и цель данной курсовой работы.
1 Принципиальная электрическая схема и описание её работы
Принципиальная электрическая схема представлена на рисунке 1.1 и является системой регулирования угловой скорости асинхронного двигателя с короткозамкнутым ротором со статическим тиристорным преобразователем частоты в цепи статора.
Схема регулирования включает: магнитный усилитель с глубокой отрицательной обратной связью и обмоткой смещения системы управления инвертором, блока питания, АД с короткозамкнутым ротором, подающей части с редуктором, цепями обратной связью с трансформаторами тока и тахогенератора с выпрямительными мостами, задающим потенциометром.
1. 1 Основные блоки схемы
Магнитный усилитель (МУ) предназначен для поддержания постоянства соотношения между нагрузкой двигателя и скоростью подачи комбайна и усиления сигнала на входе станции управления инвертора (СУИ).
Станция управления инверторами предназначена для преобразования постоянного тока в трехфазное напряжение регулируемой частоты.
Блок питания предназначен для преобразования переменного тока с частотой 50 Гц в постоянный ток и регулирования выпрямленного напряжения. Он состоит из управляемого вентиля и станции управления вентилями (СУВ).
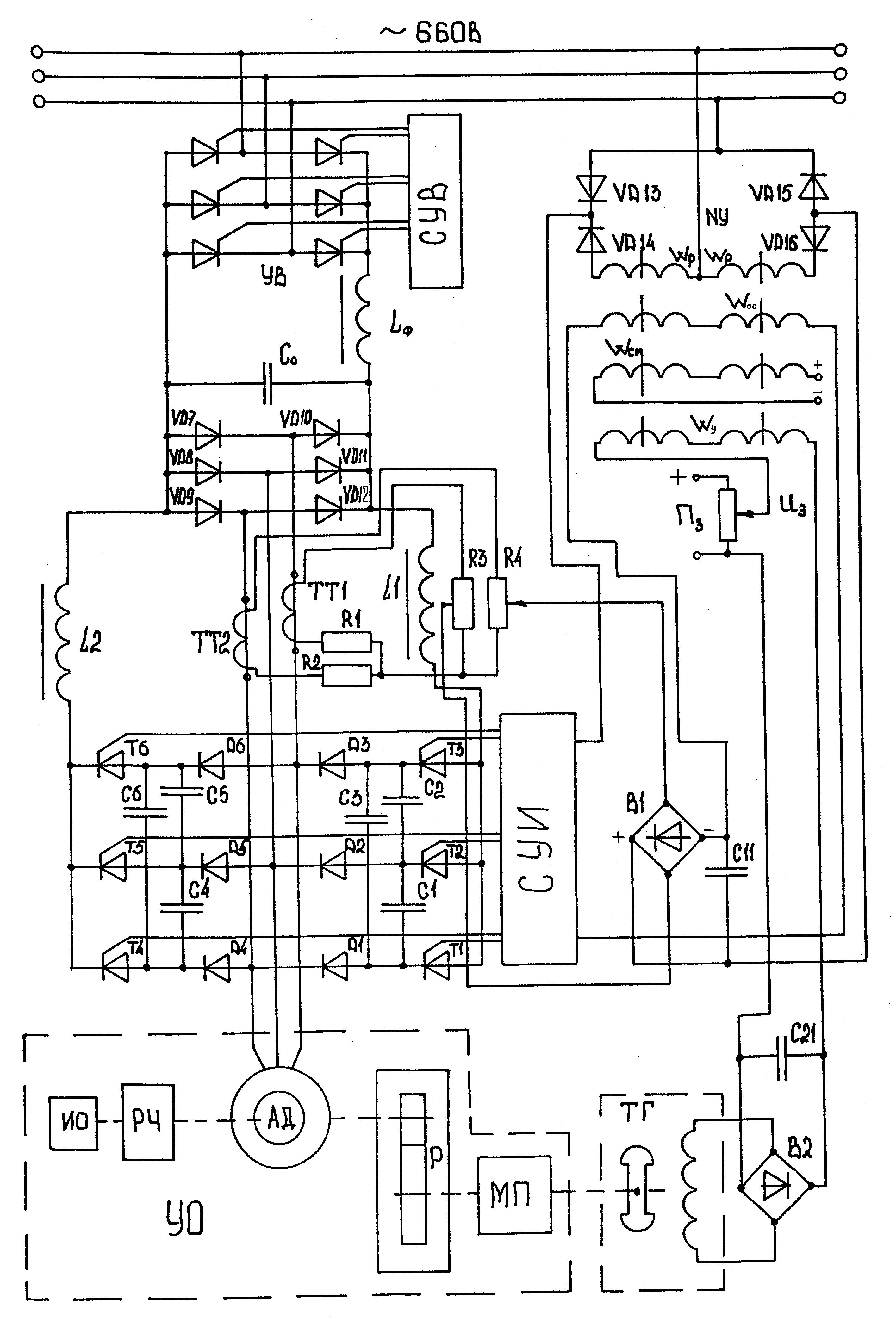
Рисунок 1.1- Схема электрическая принципиальная
Двигатель (Д) предназначен для воздействия на исполнительный орган и механизм подачи. В свою очередь, механизм подачи (МП) с редуктором (Р) предназначены для передачи угловой скорости ротора асинхронного двигателя к приводной звездочке комбайна. Исполнительный орган (ИО) предназначен для разрушения угольного массива. Режущая часть (РЧ) предназначена для передачи электродвижущего момента от двигателя к исполнительному органу для преодоления сил резания.
Датчик нагрузки ( ДН ) предназначен для преобразования тока нагрузки двигателя в пропорциональное напряжение постоянного тока. Датчик скорости ( ДС ) предназначен для преобразования скорости перемещения комбайна в напряжение постоянного тока. Взаимодействие блоков схемы и принцип действия системы состоит в следующем: регулирование угловой скорости асинхронного двигателя с короткозамкнутым ротором осуществлено на базе схемы со статическим преобразователем частоты в цепи статора, выполненном на базе полупроводниковых элементов (тиристорных). Применение такой схемы позволяет повысить КПД установки, уменьшить ее габариты, а также увеличить быстродействие. При изменении частоты изменяется не только синхронная угловая скорость двигателя, но и его критический момент и критическое скольжение. Если пренебречь активным сопротивлением статора двигателя, формулы:

примут
вид :
где f1 – частота тока питающей сети;
m – число фаз;
ω0 – угловая скорость магнитного поля статора:
ω 0=2πf1/P;
где Р – число пар полюсов двигателя;
Uф – вектор фазного напряжения сети;
R1, R2,
![]() ,
Х1,
,
Х1,
![]() – активные и индуктивные сопротивления
однофазной схемы замещения асинхронного
двигателя.
– активные и индуктивные сопротивления
однофазной схемы замещения асинхронного
двигателя.
Таким образом, с изменением частоты тока сети f1 можно изменить перегрузочную способность двигателя. Cохранение постоянной перегрузочной способности двигателя осуществлено одновременным изменением величины подводимого напряжения и частоты тока по закону:
U/f1=const . (1.1)
Вспомогательным звеном в поддержании постоянства соотношения (1.1) является магнитный усилитель, выход которого подан на вход станции управления инвертором. Величина тока нагрузки МУ определяется соотношением мощности, потребляемой асинхронным двигателем Р, и скорости подачи комбайна Vп. Изменение мощности отрабатывается цепью обратной связью МУ, а скорость подачи – цепью сравнения с управляющей обмотки wу магнитного усилителя. Это соотношение предписывается по закону Р/Vп = min – минимальных затрат электроэнергии путем регулирования потенциометра П и резисторов Rз, R4 в цепи обмотки управления и обратной связи МУ.
Измерителями нагрузки и скорости подачи являются соответственно трансформаторы тока ТТ1 и ТТ2 и тахогенераторный датчик ТГ.
Работа схемы (рис.1.1) состоит в следующем. При изменении нагрузки на исполнительном органе меняется момент статический на валу режущей части и асинхронного двигателя, а следовательно, напряжение на резисторах Rз и R4; пропорциональное току нагрузки двигателя, измеряемое ТТ1 и ТТ2 . Это значение напряжения, прикладываемое к обмотке обратной связи МУ, подмагничивая сердечники и индуктивное сопротивление рабочих обмоток Wр1 уменьшается. Сигнал на входе СУИ изменяется, что приводит к изменению частоты тока, питающей двигатель сети. Преобразование питающего двигатель напряжения обеспечивает управляемый выпрямитель УВ.
Система СУИ производит преобразование постоянного тока в трехфазное напряжение регулируемой частоты, осуществляется переключением тиристоров в плечах моста с заданной частотой и в определенной последовательности. Неотъемлемой частью тиристорных инверторов являются устройства принудительной коммутации, предназначенные для запирания тиристоров. Роль последних выполняют коммутирующие конденсаторы С1 - С6. Диоды Д1 - Д6 защищают коммутирующие конденсаторы от нагрева, что позволяет уменьшить их емкость и устранить их влияние на напряжение нагрузки. Диоды Д7 – Д12 пропускают реактивно отстающий ток нагрузки в те моменты времени, когда знаки тока и момента не совпадают. При этом за счет самоиндукции или ЭДС обмотки статора соответствующий диод этого моста открывается и спадающим током нагрузки производит перезаряд конденсатора С0. Дроссели L1 и L2 ограничивают ток разряда конденсаторов С1 - С 6. С изменением частоты f1 и напряжения Uф изменяется угловая скорость ротора двигателя ωд. Напряжение на выходе тахогенератора, преобразованное в напряжение постоянного тока ( мост В1 и емкость С2 ), пропорционально ωд, включено встречно с задаваемым UЗ. Разность рассогласования :
Е = UТГ - UЗ
воздействует на обмотку управления Wy магнитного усилителя. В результате изменяется индуктивное сопротивление рабочих обмоток и происходит корректировка по скорости подачи. Последняя устанавливается в соответствии с моментом сопротивления Мс и соблюдением соотношения
Р / Vп = min
и заданных значений на потенциометре П и резисторах R3, R4.
Таким образом, частотное регулирование электропривода комбайна позволяет повысить его эксплуатационную производительность, обеспечить плавность и оптимальные зоны управления.