

Вопрос № 4 Сформулируйте и докажите условия равновесия системы сходящихся сил
Пусть на свободное твердое тело действует система сходящихся сил {F1 F2,...Fn). Сложив по правилу силового многоугольника N—1 этих сил, приведем данную систему сходящихся сил к системе двух сил (R1 Fn). Но, по первой аксиоме, две силы R1 и FN, приложенные к твердому телу, эквивалентны нулю, т.е. находятся в равновесии только в том случае, когда они имеют равные модули и направлены по одной прямой в противоположные стороны, т.е. если их равнодействующая R =R1+Fn равна нулю. Следовательно, для равновесия системы сходящихся сил необходимо и достаточно, чтобы равнодействующая этой системы сил равнялась нулю, т.е. Это векторное условие равновесия системы сходящихся сил.
Т ак
как равнодействующая R*
изображается
вектором, замыкающим
силовой многоугольник, то геометрически
условие равновесия системы сходящихся
сил означает, что силовой многоугольник,
построенный на векторах слагаемых
сил данной системы, замкнут.
ак
как равнодействующая R*
изображается
вектором, замыкающим
силовой многоугольник, то геометрически
условие равновесия системы сходящихся
сил означает, что силовой многоугольник,
построенный на векторах слагаемых
сил данной системы, замкнут.
Выразим теперь это условие аналитически. Из предыдущего параграфа известно, что модуль равнодействующей системы сходящих сил определяется по формуле системы

каждое из этих слагаемых равно нулю в отдельности, т.е.
Т![]() аким
образом, для
равновесия пространственной системы
сходящихся сил необходимо и достаточно,
чтобы алгебраические суммы проекций
всех сил на каждую из трех выбранных
любым образом координатных
осей равнялись нулю.
аким
образом, для
равновесия пространственной системы
сходящихся сил необходимо и достаточно,
чтобы алгебраические суммы проекций
всех сил на каждую из трех выбранных
любым образом координатных
осей равнялись нулю.
Имея плоскую систему сходящихся сил, всегда можно плоскость, в которой расположены силы, принять за координатную плоскость хОу. Тогда третье условие в формулах (3) выполняется тождественно, и условия равновесия, в рассматриваемом случае, сведутся к двум следующим условиям:
Т .е.
для
равновесия плоской системы сходящихся
сил необходимо
и достаточно, чтобы алгебраические
суммы проекций всех сил на каждую
из двух выбранных любым образом
координатных осей, лежащих в плоскости
действия сил данной системы, равнялись
нулю.
.е.
для
равновесия плоской системы сходящихся
сил необходимо
и достаточно, чтобы алгебраические
суммы проекций всех сил на каждую
из двух выбранных любым образом
координатных осей, лежащих в плоскости
действия сил данной системы, равнялись
нулю.
Вопрос № 5 дайте обоснование векторной формулы момента силы относительно точки
П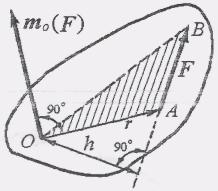 усть
даны сила F, приложенная в точке А тела,
и некоторый центр О. Вращательный эффект
силы F относительно точки О зависит от
модуля силы F и кратчайшего расстояния
h от точки О до линии действия силы.
Это кратчайшее расстояние h называется
плечом силы относительно данной
точки (рис. 1.13). Кроме того, вращательный
эффект силы зависит от положения в
пространстве плоскости поворота
треугольника ОАВ, проходящей через
моментную точку О и линию
усть
даны сила F, приложенная в точке А тела,
и некоторый центр О. Вращательный эффект
силы F относительно точки О зависит от
модуля силы F и кратчайшего расстояния
h от точки О до линии действия силы.
Это кратчайшее расстояние h называется
плечом силы относительно данной
точки (рис. 1.13). Кроме того, вращательный
эффект силы зависит от положения в
пространстве плоскости поворота
треугольника ОАВ, проходящей через
моментную точку О и линию
действия силы F, и от направления поворота в этой плоскости. Для количественно го измерения вращательного эффекта силы F, относительно заданной точки, введем понятие момента силы. Моментом силы относительно точки называется алгебраическая величина, равная произведению модуля силы на кратчайшее расстояние от точки до линии действия силы.Численное значение момента силы F относительно точки О будем обозначать mo(F). Тогда mo(F) = ±Fh. (1)
У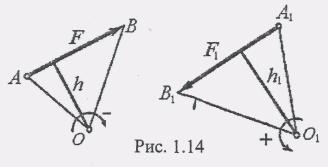 словились
считать момент силы относительно точки
положительным, если сила стремится
вращать тело вокруг заданного центра
против хода часовой стрелки, и
отрицательным — по часовой стрелке
(рис. 1.14). Из определения величины
момента силы относительно точки следует,
что он не зависит от переноса силы вдоль
линии ее действия и равен нулю, если
линия действия силы проходит через
моментную точку.
словились
считать момент силы относительно точки
положительным, если сила стремится
вращать тело вокруг заданного центра
против хода часовой стрелки, и
отрицательным — по часовой стрелке
(рис. 1.14). Из определения величины
момента силы относительно точки следует,
что он не зависит от переноса силы вдоль
линии ее действия и равен нулю, если
линия действия силы проходит через
моментную точку.
Геометрически численное значение момента силы F относительно точки О выражается удвоенной площадью треугольника ОАB, вершиной которого является данная точка О, а основанием - сила F:
![]()
Момент
силы относительно точки О можно принимать
за алгебраическую величину лишь в
случае плоской системы сил. О![]() бозначим
вектор-момент силы F относительно точки
О символом mo(F).
Тогда, рассматривая его величину,
определяемую формулами (1)-(2), и
принимая во внимание направление
вектор-момента, приходим к заключению,
что вектор-момент m0(F) можно определить
с помощью следующего векторного
произведения:
бозначим
вектор-момент силы F относительно точки
О символом mo(F).
Тогда, рассматривая его величину,
определяемую формулами (1)-(2), и
принимая во внимание направление
вектор-момента, приходим к заключению,
что вектор-момент m0(F) можно определить
с помощью следующего векторного
произведения:
Итак, момент силы относительно некоторого центра равен векторному произведению радиус-вектора точки приложения силы на вектор силы.
Вопрос № 6
Дайте обоснование определения момента силы относительно оси
Р ассмотрим
тело, которое может вращаться вокруг
неподвижной оси z (рис. 1.16). Пусть на
это тело действует сила F, приложенная
к точке А тела. Проведем через точку
приложения силы перпендикулярно оси
z плоскость, котораяпересекается с осью
z в точке О.
ассмотрим
тело, которое может вращаться вокруг
неподвижной оси z (рис. 1.16). Пусть на
это тело действует сила F, приложенная
к точке А тела. Проведем через точку
приложения силы перпендикулярно оси
z плоскость, котораяпересекается с осью
z в точке О.
Разложим данную силу на две составляющие: составляющую Fz, параллельную оси z, и составляющую Fxy, лежащую в плоскости хОу и являющуюся проекцией силы F на эту плоскость. Очевидно, что составляющая Fz, параллельная оси z, не может повернуть тело вокруг оси z; эта сила стремится только сдвинуть тело вдоль оси z. Это значит, что вращательный эффект силы F относительно оси z одинаков с вращательным эффектом, создаваемым ее составляющей Fxy (т.е. проекцией силы F на плоскость перпендикулярную оси z), относительно точки О.
Отсюда следует определение момента силы относительно оси, который будем обозначать символом mz(F).
Моментом силы относительно оси называется алгебраическая величина момента проекции этой силы на плоскость, перпендикулярную к данной оси, относительно точки пересечения этой плоскости с осью. Момент силы F относительно оси считается положительным, если наблюдатель, смотрящий с положительного направления оси, видит поворот, совершаемый составляющей Fxy силы F, происходящим против хода часовой стрелки.
Из определения момента силы относительно оси следует
![]()
Момент силы относительно оси равен нулю, если сила параллельна оси или пересекает ее. В обоих случаях сила и ось лежат в одной плоскости.
Вопрос № 7
Зависимость между моментом силы относительно оси и моментом силы относительно любой точки, лежащей на этой оси
Пусть на тело действует приложенная в точке А сила F (рис. 1.17). Момент этой силы относительно произвольной точки О, лежащей на оси z, перпендикулярен плоскости треугольника ОАВ и по величине равен удвоенной его площади
![]()
Проведя через точку О плоскость хОу перпендикулярно оси z и проецируя силу F на эту плоскость найдём
![]()
Т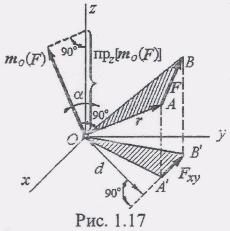 реугольник
О А'В' представляет собой проекцию
треугольника ОАВ на плос кость хОу.
Известно, что площадь проекции равна
площади проецируемой фигуры,
умноженной на косинус угла между
плоскостью этой фигуры и плоскостью
проекции. Угол между плоскостями
треугольников ОАВ и О А'В' равен углу
между перпендикулярами к этим плоскостям,
т.е. углу а между осью z и вектором mо(F)
(см. рис. 1.17).
реугольник
О А'В' представляет собой проекцию
треугольника ОАВ на плос кость хОу.
Известно, что площадь проекции равна
площади проецируемой фигуры,
умноженной на косинус угла между
плоскостью этой фигуры и плоскостью
проекции. Угол между плоскостями
треугольников ОАВ и О А'В' равен углу
между перпендикулярами к этим плоскостям,
т.е. углу а между осью z и вектором mо(F)
(см. рис. 1.17).
Поэтому![]()
(3) Умножая равенстве (3) на 2 и учитывая формулы (1) и (2), находим
![]()
Таким образом, доказана следующая теорема.
Момент силы относительно оси равен проекции на эту ось вектор-момента силы относительно произвольной точки, лежащей на этой оси.
Вопрос № 8 Докажите аналитические выражения моментов силы относительно координатных осей
Е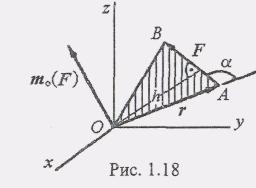 сли
сила F задана своими проекциями Fx, Fy, Fz
и координатами х, у, z точки приложения,
то момент силы относительно начала
координат может быть представлен в
виде определителя третьего порядка*
сли
сила F задана своими проекциями Fx, Fy, Fz
и координатами х, у, z точки приложения,
то момент силы относительно начала
координат может быть представлен в
виде определителя третьего порядка*
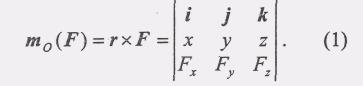
Разлагая этот определитель по элементам первой строки, найдем разложение вектора mo(F) по ортам декартовой системы координат
![]()
Коэффициенты при единичных ортах в формуле (2) равны проекциям вектор-момента силы на оси координат.
С другой стороны, согласно теореме с связи между моментом силы относительно оси и моментом силы относительно любой точки, лежащей на этой оси проекции вектор-момента силы на оси координат, равны моментам силы относительно этих осей. Таким образом,
![]()
С помощью этих формул момент силы относительно оси можно вычислить, зная проекции силы и координаты точки ее приложения.