

7.2. Динамика кшм
Анализ всех сил, действующих в кривошипно-шатунном механизме, необходим для расчета деталей двигателей на прочность, определения крутящего момента и нагрузок на подшипники. В курсовом проекте он проводится для режима номинальной мощности.
Силы, действующие в кривошипно-шатунном механизме двигателя, делятся на силу давления газов в цилиндре (индекс г), силы инерции движущихся масс механизма и силы трения.
Силы инерции движущихся масс кривошипно-шатунного механизма, в свою очередь, делятся на силы инерции масс, движущихся возвратно-поступательно (индекс j), и силы инерции вращательно движущихся масс (индекс R).
В течение каждого рабочего цикла (720º для четырехтактного двигателя) силы, действующие в КШМ, непрерывно меняются по величине и направлению. Поэтому для определения характера изменения этих сил по углу поворота коленчатого вала их величины определяют для отдельных последовательных положений вала с шагом равным 30º.
Результаты расчетов рекомендуется сводить в таблицы.
Сила давления газов. Сила давления газов возникает в результате осуществления в цилиндре двигателя рабочего цикла. Эта сила действует на поршень, и ее значение определяется как произведение перепада давления на поршне на его площадь: Pг=(рг-рo)Fп, (Н). Здесь рг — давление в цилиндре двигателя над поршнем, Па; рo — давление в картере, Па; Fп — площадь поршня, м2.
Для оценки динамической нагруженности элементов КШМ важное значение имеет зависимость силы Pг от времени (угла поворота кривошипа). Ее получают перестроением индикаторной диаграммы из координат р - V в координаты р - φ. При графическом перестроении на оси абсцисс диаграммы р - V откладывают перемещения xφ поршня от ВМТ или изменение объема цилиндра Vφ = xφFп (рис. 14)соответствующие определенному углу поворота коленчатого вала (практически через 30°) и восстанавливается перпендикуляр до пересечения с кривой рассматриваемого такта индикаторной диаграммы. Полученное значение ординаты переносится на диаграмму р — φ для рассматриваемого угла поворота кривошипа.
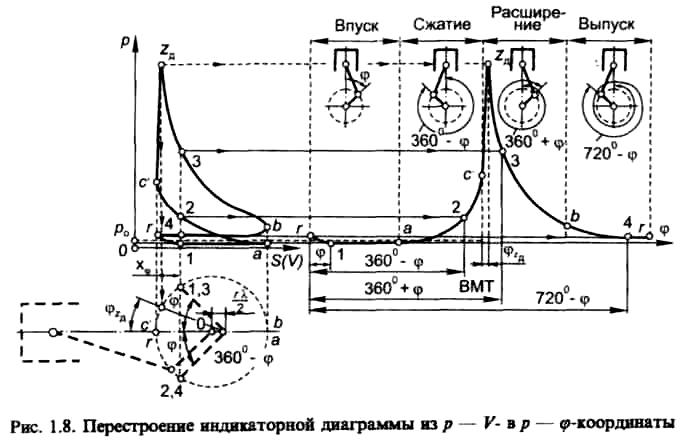
Рис. 14. Перестроение
индикаторной диаграммы из p
– V
в р
– φ координаты
Сила давления газов, действующая на поршень, нагружает подвижные элементы КШМ, передается на коренные опоры коленчатого вала и уравновешивается внутри двигателя за счет упругой деформации элементов, формирующих внутрицилиндровое пространство, силами Рг и Рг', действующими на головку цилиндра и на поршень, как это показано на рис. 15. Эти силы не передаются на опоры двигателя и не вызывают его неуравновешенности.
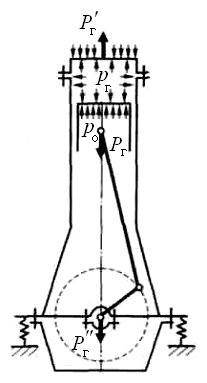
Рис. 15. Воздействие газовых сил на элементы конструкции КШМ
Силы инерции. Реальный КШМ представляет собой систему с распределенными параметрами, элементы которой движутся неравномерно, что вызывает появление инерционных сил.
Детальный анализ динамики такой системы принципиально возможен, однако сопряжен с большим объемом вычислений.
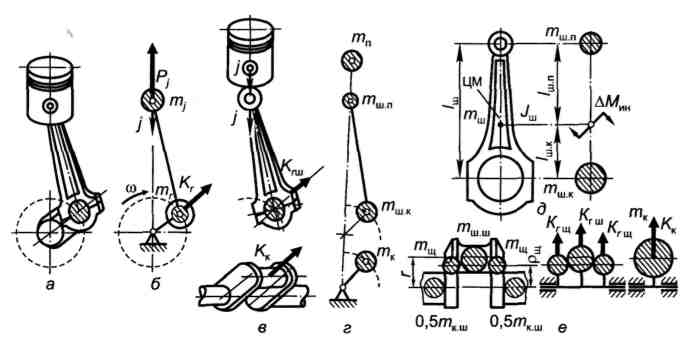
В связи с этим в инженерной практике для анализа динамики КШМ широко используют динамически эквивалентные ему системы с сосредоточенными параметрами, синтезируемые на основе метода замещающих масс. Критерием эквивалентности является равенство в любой фазе рабочего цикла совокупных кинетических энергий эквивалентной модели и замещаемого ею механизма. Методика синтеза модели, эквивалентной КШМ, базируется на замене его элементов системой масс, связанных между собой невесомыми абсолютно жесткими связями (рис. 16).
 Детали
кривошипно-шатунного механизма имеют
разных характер движения, что обуславливает
появление инерционных сил различного
вида.
Детали
кривошипно-шатунного механизма имеют
разных характер движения, что обуславливает
появление инерционных сил различного
вида.
Рис. 16. Формирование эквивалентной динамической модели КШМ:
а — КШМ; б — эквивалентная модель КШМ; в — силы в КШМ; г — массы КШМ;
д — массы шатуна; е — массы кривошипа
Детали поршневой группы совершают прямолинейное возвратно-поступательное движение вдоль оси цилиндра и при анализе ее инерционных свойств могут быть замещены равной им массой тп, сосредоточенной в центре масс, положение которого практически совпадает с осью поршневого пальца. Кинематика этой точки описывается законами движения поршня, вследствие чего сила инерции поршня Pjп = –mпj, где j— ускорение центра масс, равное ускорению поршня.
Кривошип коленчатого вала совершает равномерное вращательное движение. Конструктивно он состоит из совокупности двух половин коренных шеек, двух щек и шатунной шейки. Инерционные свойства кривошипа описываются суммой центробежных сил элементов, центры масс которых не лежат на оси его вращения (щеки и шатунная шейка):
![]() ,
,
где Кrш.ш, Кrщ и r, ρщ — центробежные силы и расстояния от оси вращения до центров масс соответственно шатунной шейки и щеки, тш.ш и mщ — массы соответственно шатунной шейки и щеки. При синтезе эквивалентной модели кривошип заменяют массой mк, находящейся на расстоянии r от оси вращения кривошипа. Величину mк определяют из условия равенства создаваемой ею центробежной силы сумме центробежных сил масс элементов кривошипа, откуда после преобразований получим mк = тш.ш + mщ ρщ /r.
Элементы шатунной группы совершают сложное плоскопараллельное движение, которое может быть представлено как совокупность поступательного движения с кинематическими параметрами центра масс и вращательного движения вокруг оси, проходящей через центр масс перпендикулярно плоскости качания шатуна. В связи с этим ее инерционные свойства описываются двумя параметрами — инерционными силой и моментом. Любая система масс по своим инерционным параметрам будет эквивалентна шатунной группе в случае равенства их инерционных сил и инерционных моментов. Простейшая из них (рис. 16, г) состоит из двух масс, одна из которых mш.п=mшlш.к/lш сосредоточена на оси поршневого пальца, а другая mш.к=mшlш.п/lш — в центре шатунной шейки коленчатого вала. Здесь lш.п и lш.к — расстояния от точек размещения масс до центра масс.
Для большинства существующих конструкций автомобильных и тракторных двигателей:
mш.п= (0,2÷0,3)mш и mш.к= (0,7÷0,8)mш
Таким образом, система сосредоточенных масс, динамически эквивалентная кривошипно-шатунному механизму, состоит из массы mj=mп+mш.п, сосредоточенной на оси пальца и имеющей возвратно-поступательное движение, и массы тr=mк+тш.к, сосредоточенной на оси шатунной шейки (см. рис. 16).
Для приближенного определения значений тп, mк, mш используют конструктивные массы т'= т/Fп (кг/м2), приведенные в табл.3
Таблица 3
Конструктивные массы деталей кривошипно-шатунного механизма в кг/м2
Тип двигателя |
Масса поршня из алюминиевого сплава т'п |
Масса шатуна т'ш |
Бензиновые двигатели (D=60...100 мм) |
100-150 |
120-200 |
Дизели (D=80...120 мм) |
200-300 |
250-350 |
Силы инерции, действующие в КШМ, в соответствии с характером движения масс разделяют на силы инерции поступательно движущихся масс Pj и центробежные силы инерции вращающихся масс Kr.
Сила инерции от возвратно-поступательно движущихся масс
![]() (7.9)
(7.9)
где C = - mjrω2
Знак минус показывает, что сила направлена в сторону противоположную ускорению.
Кривая ускорения поршня j = j(φ) в соответствующем масштабе и с обратным знаком является кривой сил инерции.
Центробежная сила инерции вращающихся масс
Kr=mrrω2 (7.10)
Она действует по радиусу кривошипа и направлена от оси коленчатого вала