

Перелік лабораторних робіт Лабораторна робота № 1
Тема. Дослідження роботи тягових електродвигунів при послідовному та паралельному з’єднаннях.
Мета: дослідження та побудова за експериментальними даними характеристик тягових електродвигунів при послідовному та паралельному з’єднаннях.
Короткі теоретичні відомості
Тягові характеристики двигунів різних систем збудження наведені на рис. 1.1. Як видно з цього рисунка, біля тягової характеристики двигуна послідовного збудження (крива 1) у зоні малих швидкостей сила тяги при збільшенні швидкості різко падає. При деякому подальшому збільшенні швидкості зміна сили тяги незначна.
Тягова характеристика двигуна паралельного збудження (крива 2) жорстка (близька до прямої вертикальної лінії). При деякій швидкості вона перетинає вісь абсцис і продовжується в області негативних (гальмівних) сил.
Крива 3 відображає тягову характеристику двигуна згідно змішаного збудження.
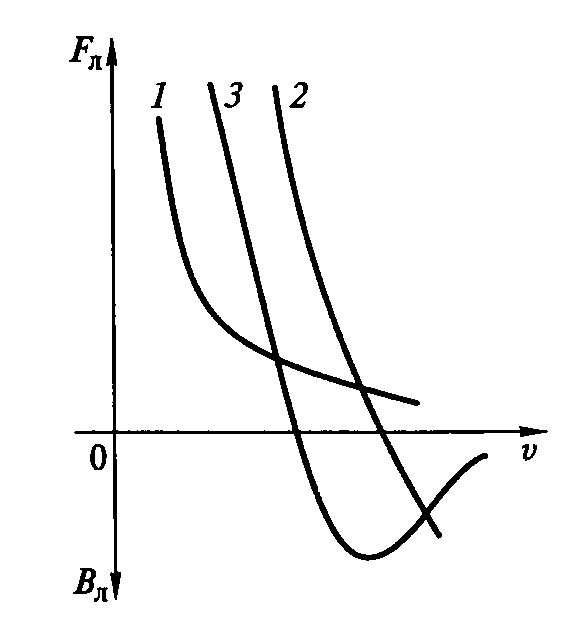
Рисунок 1.1 - Тягові характеристики двигунів системи збудження:
1 - послідовного; 2 - паралельного; 3 - згідно-змішаного; Fл - сила тяги локомотива; Вл - гальмівна сила локомотива; v - швидкість
Основними вимогами, яким повинні задовольняти тягові двигуни, є електрична стійкість, механічна стійкість; рівномірний розподіл навантажень між паралельно працюючими двигунами; максимальне використання зчіпної ваги; стійкість комутації; найменший вплив на енергосистему; можливість плавного регулювання швидкості та застосування рекуперації; простота конструкції.
Аналіз роботи в режимі тяги двигунів різних систем збудження показує, що найбільшу електричну і механічну сталість мають двигуни послідовного і згідно-змішаного збудження; сприятливий розподіл навантажень має місце у двигунів з м'якими характеристиками (ТЕД послідовного збудження); найкраще використання зчіпної ваги - у двигунів з жорсткими характеристиками (ТЕД паралельного і незалежного збудження). Проте в останніх двох випадках суттєве значення має схема з'єднання двигунів.
На рухомому складі, як правило, встановлено декілька двигунів, які можуть бути включені як послідовно, так і паралельно. При послідовному з'єднанні декількох двигунів характеристика двигуна, пов'язана з боксуючою колісною парою, стає м'якою, тому що напруга на боксуючому двигуні підвищується, викликаючи подальше збільшення швидкості його обертання.
Можна показати, що при послідовному
з'єднанні zc
двигунів швидкість ковзання боксуючої
колісної пари зростає в zс разів
у порівнянні зі швидкістю ковзання при
двигуні, безпосередньо включеному на
постійну напругу. Відповідно в zс
разів зменшується жорсткість![]() тягової характеристики
двигуна, пов'язаного з боксуючою
колісною парою.
тягової характеристики
двигуна, пов'язаного з боксуючою
колісною парою.
Таким чином, послідовне включення двигунів, не зважаючи на кращий розподіл сил тяги між двигунами, значимо менш сприятливо з точки зору використання зчіпної ваги, ніж паралельне. Недоліком послідовного включення є і те, що зі збільшенням швидкості ковзання боксующої колісної пари падає струм, а відповідно, і сила тяги всіх двигунів, з'єднаних послідовно з боксующим. З точки зору надійності комутації та впливу на систему енергозабезпечення найкращі властивості мають двигуни з м’якими характеристиками.
Регулювання швидкості і рекуперація краще здійснюються у двигунів паралельного та згідно-змішаного збудження. Перевагою цих двигунів є автоматичний перехід у генераторний режим, що дозволяє легко здійснювати рекуперативне гальмування. Ще кращі регулювальні властивості у двигуна незалежного збудження.
Рух електрорухомого складу, як відомо, починається з пуску, після чого здійснюють регулювання швидкості двигуна. Умови пуску і регулювання швидкості залежать від системи тягового приводу.
Зміна напруги на затискачах тягового двигуна при заданій напрузі контактної мережі можна здійснити різними способами: перемиканням тягових двигунів з послідовного на паралельне з'єднання; установкою перетворювачів напруги на електрорухомий склад.
Послідовно-паралельне перемикання
тягових двигунів – досить
економічний спосіб. На рис. 1.2 в якості
приклада показані дві схеми з'єднання
чотирьох тягових двигунів. При послідовному
з'єднанні (рис. 1.2, а) до
кожного двигуна підводиться напруга
![]() .
При послідовно-паралельному з'єднанні
(рис. 1.2, б) напруга на
двигуні збільшується до
.
При послідовно-паралельному з'єднанні
(рис. 1.2, б) напруга на
двигуні збільшується до
![]() .
.
Рисунок 1.2 - Схеми послідовного (а) і послідовно-паралельного (б) з'єднання двигунів: Uс - напруга в тяговій мережі
Хід роботи
Ознайомитись з лабораторним стендом.
Зняти та побудувати статичні характеристики для декількох точок навантаження від min до max.
Зняти та побудувати динамічні характеристики тягових електродвигунів при послідовному та паралельному з’єднаннях у рушійному режимі:
пуск тягових електродвигунів з максимальним навантаженням;
робота тягових електродвигунів при накиданні і скиданні максимального навантаження;
пуск тягових електродвигунів з мінімальним навантаженням;
робота тягових електродвигунів при накиданні і скиданні мінімального навантаження.
Зміст звіту
Титульний аркуш.
Назва та мета роботи.
Функціональна схема стенду.
Динамічні характеристики тягових електродвигунів при послідовному та паралельному з’єднаннях у рушійному режимі у системах координат
 ,
,
 ,
,
 .
.Статичні характеристики тягових електродвигунів при послідовному та паралельному з’єднаннях
 ,
,
 ,
,
 .
.Висновки щодо роботи.