

1.2.3Исследование модернизированной модели асинхронного двигателя в Simulink
1.2.3.1Модернизация виртуальной модели асинхронного двигателя
Раскроем модель асинхронной машины. Для этого вызовем файл Fig1_60 (рисунок 1.60) и щелчком правой кнопки мыши вызовем динамическое меню.
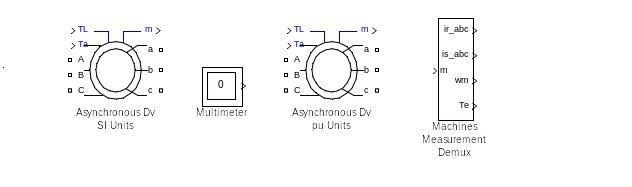
Рисунок 1.60 – Модернизированные модели асинхронного двигателя для ввода параметров в абсолютных (Si Units) и относительных (pu Units) единицах
Выбираем команду Look Under Mask и раскрываем двигатель (рисунок 1.61).
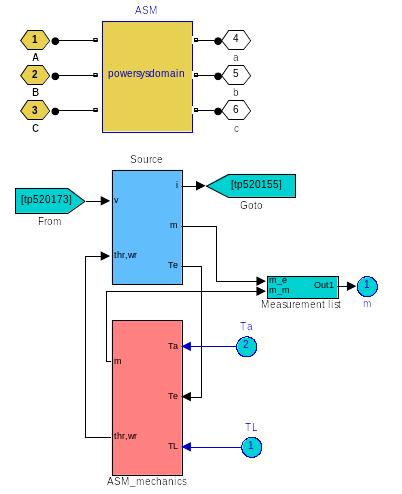
Рисунок 1.61 – Структура модели асинхронного двигателя
В отличие от существующей модели, приведённой в SimPowerSystems, заменено обозначение активного момента с Tm на Ta и введен дополнительный вход для реактивного момента TL. Раскрываем двойным щелчком левой кнопки мыши блок ASM_mechanics и вносим изменения, связанные с моделированием реактивного момента нагрузки (рисунок 1.62).

Рисунок 1.62 – Модернизированная схема блока ASM_mechanics
Для модернизации используем модель реактивной нагрузки, приведённой в файле Fig1_23. Введённые дополнительные блоки выделены синим цветом. Блок Reactiv mom введён без изменения, что для двигателя постоянного тока. Так как моделирование электромагнитного момента Te в модели в SimPowerSystems для асинхронного двигателя производится в некотором масштабе, то абсолютные значения активного и реактивного моментов нагрузки приводятся к масштабу Te через масштабные блоки 1_Tb2 и 1_Tb1. Масштабный коэффициент на частоту вращения вводить не надо, так как блок реактивного момента выделяет только знак частоты вращения.
Модернизация модели в относительных единицах не отличается от приведённой для абсолютных единиц, так как блоки ASM_mechanics выполнены одинаковыми.

Рисунок 1.63 – Диалоговое окно для ввода параметров АКЗ двигателя в относительных единицах
Ввод исходной информации в диалоговое
окно по двигателю в относительных
единицах не вызывает особых затруднений,
кроме параметра H(s)
(см. рисунок 1.63). В технической литературе
[3] известно выражение
 ,
где Н – эквивалент момента инерции
в относительных единицах. Однако
выражение для Н приведено для
относительного времени. С учетом
действительного времени это выражение
для Н принимает вид:
,
где Н – эквивалент момента инерции
в относительных единицах. Однако
выражение для Н приведено для
относительного времени. С учетом
действительного времени это выражение
для Н принимает вид:
 .
.
В Helpе приводится уравнение движения привода (1.39), в котором параметр Н записан с коэффициентом 2.
![]() (
1.0)
(
1.0)
С учетом принятой в Simulink условностью выражение для H(s) принимает вид:
 .
( 1.0)
.
( 1.0)
В диалоговое окно (см. рисунок 1.63) введено значение H(s), вычисленное по формуле (1.40).
1.2.3.2Моделирование пуска – реверса с применением модернизированной модели асинхронного двигателя
Рассмотрим два файла моделей с вводом параметров в абсолютных и безразмерных (относительных) единицах (рисунки 1.64 и 1.65).

Рисунок 1.64 –Электропривод с модернизированной моделью двигателя (Fig1_64)
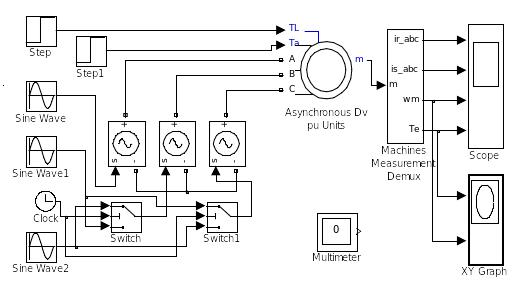
Рисунок 1.65 – Привод с вводом параметров в безразмерной форме (Fig1_65)
Для примера возьмём двигатель RA112M4 (см. таблицу 1.2), введём справочные данные двигателя в программу Fig1_51 и определим параметры схемы замещения, требуемые для моделирования двигателя в Simulink (рисунок 1.66).
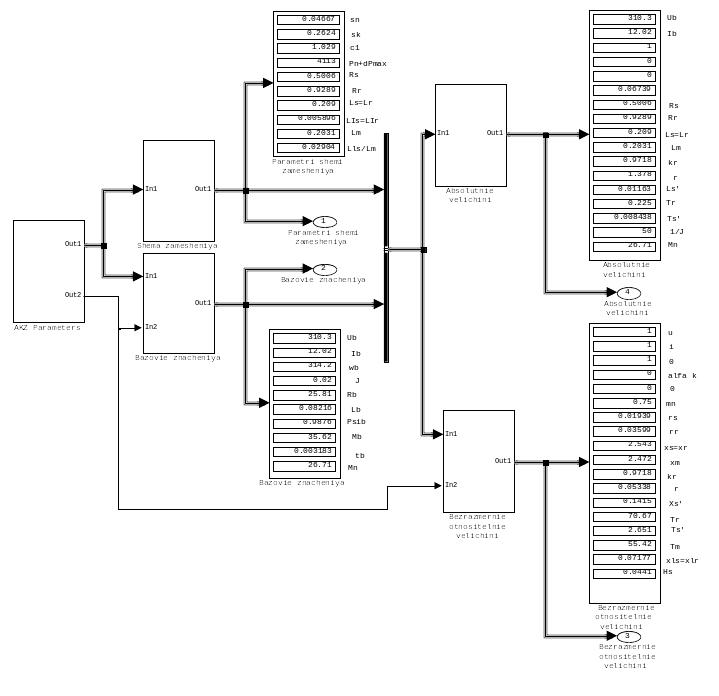
Рисунок 1.66 – Результаты расчета параметров схемы замещения двигателя RA112M4 по программе, приведённой в файле Fig1_51
В абсолютных единицах для файлов Fig1_64, Fig1_65 введённая информация в диалоговое окно представлена на рисунке 1.67.
Результаты моделирования процесса пуска – реверса для обеих схем электропривода представлены на рисунках 1.68…1.71. Нагрузка подаётся по реактивному входу TL и выбрана номинального значения.
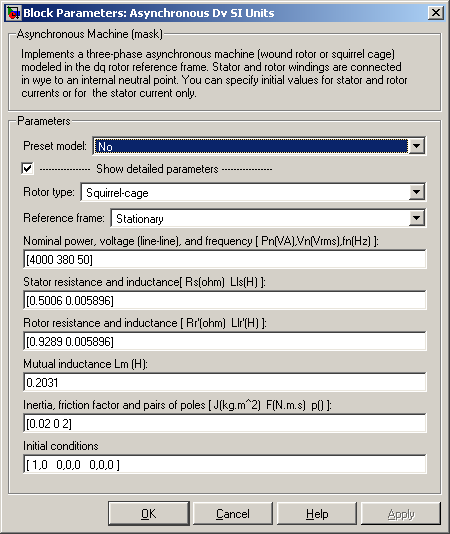
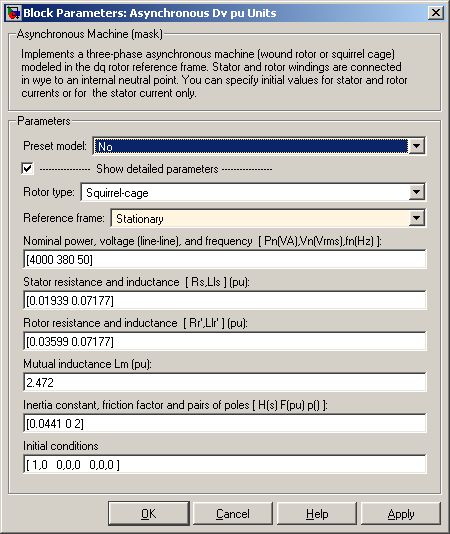
Рисунок 1.67 – Введённые параметры схемы замещения двигателя RA112M4

Рисунок 1.68 – Результаты моделирования асинхронного электропривода в абсолютных единицах

Рисунок 1.69 – Динамическая механическая характеристика двигателя RA112M4 в абсолютных единицах

Рисунок 1.70 – Результаты моделирования пуска – реверса двигателя RA112M4 в относительных (безразмерных) единицах

Рисунок 1.71 – Динамическая механическая характеристика двигателя RA112M4 в относительных единицах
В приведённых примерах решались две задачи: показать, что модернизированная модель асинхронного двигателя способна работать с реактивным моментом нагрузки и что две разновидности моделей (в абсолютных и относительных единицах) идентичны. Анализ полученных результатов доказывает, что модернизированные модели двигателя работают с реактивным моментом нагрузки и результаты моделирования одной и той же задачи в абсолютных и относительных единицах совпадают. Кроме того, доказана справедливость выражения (1.40) для вычисления параметра H(s).