

4.5Оптимизация и имитационное исследование в Simulink контура скорости
4.5.1Расчёт параметров регулятора скорости при идеальном источнике тока
Структурная схема контура скорости показана на рисунке 4.33.
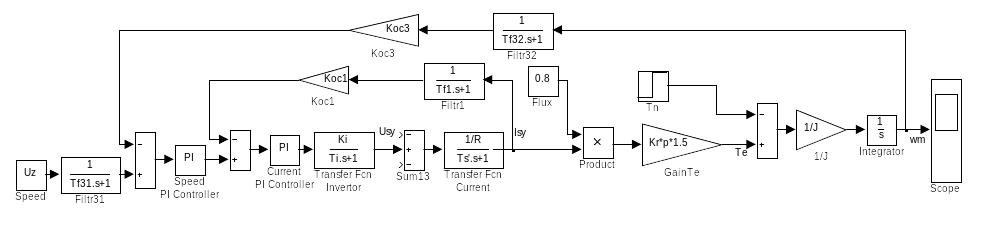
Рисунок 4.251 – Структурная схема контура скорости
Схема включает:
контур тока с регулятором тока Current PI Controller, передаточной функцией инвертора Transfer Fcn Invertor, узлом ввода возмущений Sum13, цепью тока Transfer Fcn Current и цепью обратной связи по току;
контур скорости с регулятором скорости Speed PI Controller, схемой формирования момента Te (блок Flux, блок умножения Product, усилитель Gain Te), двигателем (Integrator и усилителем 1/J).
Контур тока был оптимизирован в подразделе 4.3, с учётом этого расчётная схема контура скорости приняла вид, показанный на рисунке 4.34.
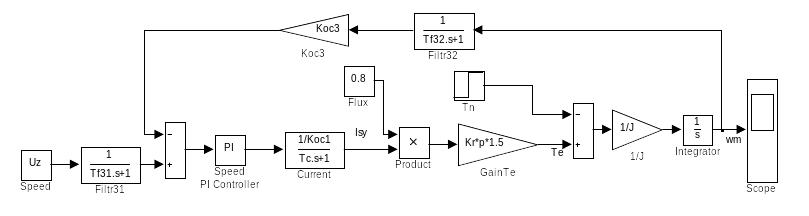
Рисунок 4.252 – Расчётная схема контура скорости
Контур содержит эквивалентный подчинённый контур тока с передаточной функцией:
, (4.0)
где - эквивалентная постоянная контура тока.
Магнитный поток представлен номинальным значением 0,8Вб.
Коэффициент усиления блока момента:
![]() .
(4.0)
.
(4.0)
Максимальный момент двигателя:
![]()
Передаточная функция фильтра Filtr32:
![]() ,
(4.0)
,
(4.0)
где
![]() - постоянная времени фильтра, которая
соответствует периоду опроса данных о
частоте вращения 400мкс.
- постоянная времени фильтра, которая
соответствует периоду опроса данных о
частоте вращения 400мкс.
Двигатель представлен интегрирующим
звеном с постоянной времени
![]() и коэффициентом усиления
и коэффициентом усиления
![]() .
(4.0)
.
(4.0)
Коэффициент обратной связи по скорости был вычислен ранее и равен:
![]() .
(4.0)
.
(4.0)
Расчёт параметров регулятора скорости произведём по симметричному оптимуму [8]. Все необходимые условия выполнены.
Рекомендуется применение пропорционально-интегрального регулятора с передаточной функцией вида:
![]() ,
(4.0)
,
(4.0)
где
![]() ;
;
![]() – малая постоянная времени контура
скорости;
– малая постоянная времени контура
скорости;
![]() – эквивалентная постоянная времени
оптимизированного контура скорости,
время изодрома регулятора;
– эквивалентная постоянная времени
оптимизированного контура скорости,
время изодрома регулятора;
![]() – коэффициенты оптимизации.
– коэффициенты оптимизации.
Переходные процессы в оптимизированном по симметричному оптимуму контуре характеризуются большим перерегулированием и колебательностью, причиной которых является форсирующее звено в числителе передаточной функции регулятора. Компенсация форсирующего эффекта достигается установкой в канале задания инерционного звена (фильтра) Filtr31 с передаточной функцией
![]() .
(4.0)
.
(4.0)
Таким образом, рассчитав все параметры контура скорости (4.25…4.31), разработаем модель в Simulink, представленную на рисунке 4.5.
Модель реализована на элементах библиотеки Simulink, за исключением регулятора скорости Speed PI Controller, схема модели которого открывается по команде Look Under Mask и была показана на рисунке 4.8.
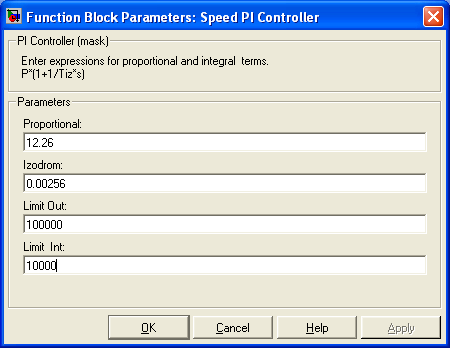
Рисунок 4.253 – Окно ввода параметров ПИ-регулятора скорости
Параметры регулятора вносятся через диалоговое окно, открывающееся при двойном щелчке по изображению регулятора (рисунок 4.35).
Блок Speed задаёт частоту вращения ротора. Частота вращения задаётся в виде напряжения. Для установленных параметров задающему напряжению в 10В соответствует частота вращения ротора 100 1/с.
На рисунке 4.36 представлена модель контура, повторенного дважды.

Рисунок 4.254 – Схема модели оптимизированного контура скорости с идеальным источником тока (Fig4_36)
Это сделано для построения кривых переходного режима для двух разных значений задающего напряжения. Напомним, что на регулятор скорости не наложены ограничения, источник тока (инвертор) идеальный, поэтому должен формироваться оптимальный режим управления (см. рисунок 4.37).
Исследование проведено для двух задающих напряжения: 10 и 1В. Показатели переходных процессов близки к оптимальному, соответствующие расчёты можно выполнить. Обратим внимание на реакцию источника тока (инвертора) при осуществлении оптимального управления. Напомним, что при расчёте параметров регулятора скорости было принято допущение о идеальности источника тока. Что это значит?
При управлении в «большом» (подача на вход 10В) двигатель запускается с оптимальными параметрами на частоту вращения 100 1/с. Для этого должен источник тока создать во времени максимальное напряжение 4689В и ток в нагрузке 86,48А. В действительности максимальное выходное напряжение инвертора 311,1В и предельный ток статора 15,13А. Следовательно, реально при управлении в «большом» оптимального быстродействия не достичь.
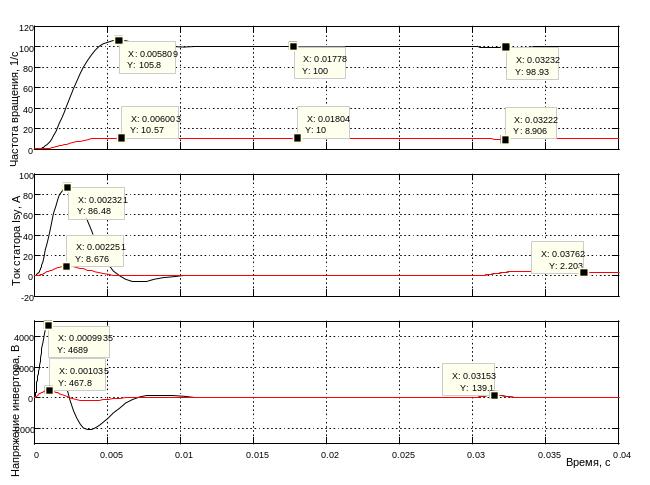
Рисунок 4.255 – Оптимизированный переходный процесс в контуре скорости при управлении по входу10 и 1В
При подаче на вход задающего напряжения 1В ситуация с выходными параметрами источника тока ближе к реальной (см. кривые переходного режима красного цвета на рисунке 4.37) и действительно параметры переходного режима приближаются к оптимальным.
В модели на рисунке 4.36 пуск выполняется без нагрузки, в момент времени 0,03с к валу двигателя прикладывается момент сопротивления номинального значения. Провал скорости на 1,1 1/с полностью устраняется за время, менее 0,005с. Пропорционально-интегральный регулятор скорости выполнил своё назначение.