

1.2.1.1.2Преобразование трёхфазной в двухфазную систему
При построении реальных систем электропривода переменного тока, как асинхронных, так и синхронных, практически всегда в систему управления включают преобразователи фаз 3/2 и 2/3 [2].
Первый (3/2) преобразовывает фазные напряжения трёхфазной системы в напряжения двухфазной системы в координатах α, β. Отметим, что как трёхосная координатная система А, В, С, так и двухосная α, β являются неподвижными системами. Пространственный вектор изображает результат совместного действия трёхфазной системы токов любой эквивалентной m – фазной и, в частности, двухфазной системы. Переход к двухфазной системе в математическом отношении эквивалентен рассмотрению пространственного вектора в новой прямоугольной системе координат α, β. Физический смысл такого преобразования координат состоит в замене реальной трёхфазной машины эквивалентной двухфазной моделью, характеризующейся тем же значением пространственного вектора. Такая замена переменных широко используется при математическом исследовании электрических машин с целью упрощения систем дифференциальных уравнений электрического равновесия статорных и роторных цепей.
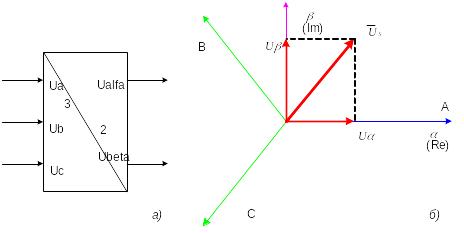
Рисунок 1.39 – Преобразование координат: а) условное графическое обозначение преобразователя; б) координаты
Преобразователь (3/2) осуществляет преобразование трёхфазных напряжений UA, UB, UC (1.10) в двухфазные напряжения Uα, Uβ в соответствии с выражениями (1.11) и (1.12):
 .
(1.0)
.
(1.0)
После преобразования (1.18) получим
![]() .
(1.0)
.
(1.0)
При этом следует иметь в виду, что фазная ось α прямоугольной (двухфазной) системы совмещена с фазной осью А трёхфазной системы (рисунок 1.39,б).
На рисунке 1.40 показана модель преобразователя (3/2) в Simulink (Matlab) [2].
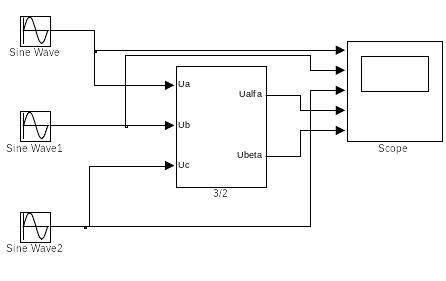
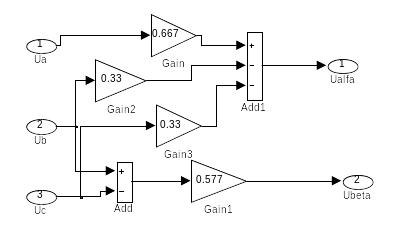
Рисунок 1.40 – Модель преобразователя (3/2) (Fig1_40)
На рисунке 1.41 показан результат преобразования трёхфазного напряжения в двухфазное.
На рисунке 1.41 показан результат
преобразования трёхфазного напряжения
в двухфазное. Амплитуда напряжения
принята Um=1В,
частота ω=314рад/сек (f=50Гц).
Не трудно отметить, что пространственный
вектор напряжения в координатах α, β
описывается выражением (1.15), полученным
для трёхфазной системы напряжений
![]() .
Из (1.15) следует, что в двухфазной системе
напряжения вычисляются, как
.
Из (1.15) следует, что в двухфазной системе
напряжения вычисляются, как
![]() и
и
![]() .
Результаты расчета напряжений Uα
и Uβ на модели
позволяют сделать вывод, что пространственный
вектор для трёхфазной и эквивалентной
двухфазной систем одинаков и имеет
выражение
.
Результаты расчета напряжений Uα
и Uβ на модели
позволяют сделать вывод, что пространственный
вектор для трёхфазной и эквивалентной
двухфазной систем одинаков и имеет
выражение
![]() .
.
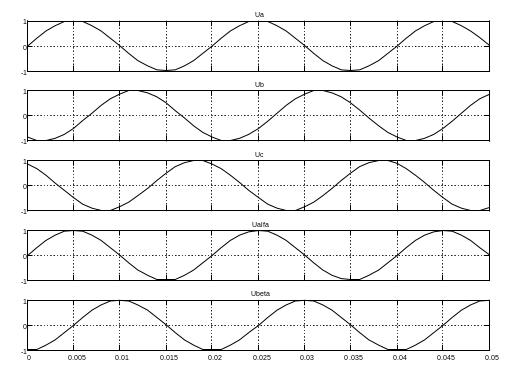
Рисунок 1.41 – Результаты преобразования 3-хфазной системы напряжений (Um=1В, f=50Гц) на модели, показанной на рисунке 1.40
1.2.1.1.3Преобразователь двухфазной системы в трёхфазную
При разработке преобразователя (2/3)
следует иметь в виду, что фазный вектор
трехфазной системы
![]() представляет проекцию пространственного
вектора
представляет проекцию пространственного
вектора
![]() на оси А, В, С. Выражения для фазных
напряжений
представляют действительную часть
проекции пространственного вектора
на фазные оси А, В, С.
на оси А, В, С. Выражения для фазных
напряжений
представляют действительную часть
проекции пространственного вектора
на фазные оси А, В, С.
В соответствии с этим, имеем [2]:
 (1.0)
(1.0)

Рисунок 1.42 – Графическая интерпретация работы преобразователя (2/3): а) условное графическое изображение преобразователя (2/3), б) преобразование координат
На рисунке 1.42 показан процесс графического
формирования мгновенного состояния
векторов фазных напряжений
![]() для произвольного положения
пространственного вектора
.
для произвольного положения
пространственного вектора
.
Полученные выражения (1.20) использованы при разработке модели преобразователя фаз (2/3) в Matlab [2], показанной на рисунке 1.43.
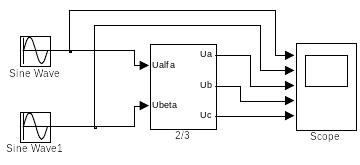

Рисунок 1.43 – Модель преобразователя фаз с раскрытой подсистемой 2/3 (Fig1_43)
На рисунке 1.44 показаны результаты моделирования эквивалентного обратного преобразования двухфазной системы в трёхфазную. Так же амплитудное напряжение Um=1В и частота 50Гц. На выходе получена трёхфазная система напряжений с прямым чередованием фаз.
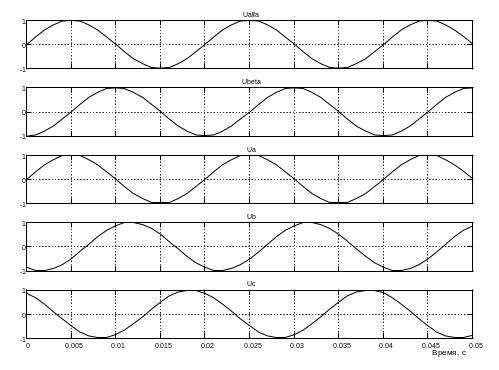
Рисунок 1.44 – Результаты моделирования работы преобразователя фаз (2/3)