

Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Санкт-Петербургский государственный горный институт им Г.В. Плеханова
(технический университет)

Кафедра кгм и тм Расчетно-графическая работа
По дисциплине: Теория машин и механизмов
___________________________________________________________________________________________________________________
Пояснительная записка
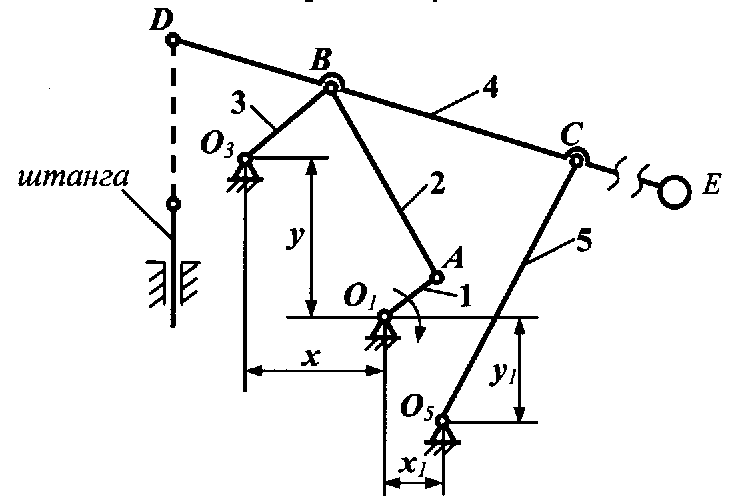
Тема: Кинематическое исследование механизма станка-качалки
Задание №18, вариант 1
Выполнил: студент гр. ТНГ-06-1 / / /Шергин А.Н./
(подпись) (Ф.И.О.)
Оценка: _____________
Дата: __________________
Проверил: / ст.Преподаватель / /_____________/ /Соколова г.В./
(должность) (подпись) (Ф.И.О.)
Санкт-Петербург
2008
Содержание
Содержание 2
Исходные данные 2
1.1. Состав механизма 4
1.2. Степень подвижности механизма 4
3 Построение масштабных кинематических диаграмм зависимостей 13
3.1 Построение кинематической диаграммы 13
3.2 Построение кинематической диаграммы 14
3.3 Построение кинематической диаграммы 14
Список использованной литературы 16
Исходные данные
Задание №18, вариант№1
Таблица №1
Параметр |
Размерность |
Значение |
|
м |
0,625 |
AB |
м |
2,50 |
|
м |
1,12 |
BC |
м |
2,14 |
BD |
м |
1,54 |
|
м |
2,56 |
CE |
м |
3,68 |
x |
м |
1,50 |
y |
м |
2,18 |
|
м |
0,94 |
|
м |
0,94 |
|
|
2,8 |
|
|
100 |
|
m |
4,5 |
|
m |
5,0 |
|
|
2,0 |
|
|
0,18 |
|
кН |
60 |
|
кН |
40 |
|
- |
0,07 |

1 Структурный анализ механизма
1.1. Состав механизма
Механизм состоит из: 1 – кривошипа, 2,4 – шатуна, 3,5 – коромысла.
Траектории подвижных звеньев механизма представлены в таблице №2.
Таблица  №2
№2
звено |
1 |
2 |
3 |
4 |
5 |
характер движения |
вращательное |
сложное плоское |
возвратное вращательное |
сложное плоское |
возвратное вращательное |
Кинематические пары механизма представлены в таблице №3.
Таблица №3
кинематическая пара |
А |
B |
C |
О1 |
O3 |
О5 |
звенья кинематической пары |
1;2 |
2;3 |
4;5 |
0;1 |
0;3 |
0;5 |
вид кинематической пары |
В |
В |
В |
В |
В |
В |
Подвижные шарниры механизма представлены в таблице №4.
Таблица №4
Шарнир |
A |
B |
C |
траектория движения |
окружность |
дуга окружности |
дуга окружности |