

1.2. Степень подвижности механизма
Определим число степеней свободы
механизма по формуле П.Л. Чебышева:
![]() ,
где
,
где
![]() -
число подвижных звеньев;
-
число подвижных звеньев;
![]() -
число кинематических пар пятого класса;
-
число кинематических пар пятого класса;
![]() -
число кинематических пар четвёртого
класса.
-
число кинематических пар четвёртого
класса.
В данном случае,
![]() ,
,
![]() ,
,
![]() .
.
Получаем
![]() .
.
Так как
![]() ,
то представленная кинематическая цепь
действительно является механизмом.
,
то представленная кинематическая цепь
действительно является механизмом.
1.3. Разложение механизма на группы л.В. Ассура
1) Отсоединим от механизма 4 и 5 структурные
звенья
![]() :
:
Проверяем четыре признака группы Л.В. Ассура:
1) Число звеньев n = 2 – четное;
2) р5 = 1,5 · n, р5 = 1,5 · 2 = 3;
3) Подвижность группы W = 0, Wгр = 3 · 2 – 2 · 3 = 0;
4) Подвижность оставшейся части W
= 1,
![]() ;
;
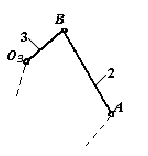
2) Отсоединим от механизма 2 и 3 структурные звенья :
Проверяем четыре признака группы Л.В. Ассура:
1) Число звеньев n = 2 – четное;
2) р5 = 1,5 · n, р5 = 1,5 · 2 = 3;
3) Подвижность группы W = 0, Wгр = 3 · 2 – 2 · 3 = 0;
4) Подвижность оставшейся части W
= 1,
![]() ;
;
3) Остался механизм первого класса:

1.4. Структурная формула механизма
Структурная формула механизма имеет вид: I - II21 – II21. Класс механизма равен наивысшему классу структурной группы, входящей в его состав. В данном случае, представленный механизм – механизм второго класса.
2 Кинематический анализ механизма
2.1. Построение плана положений
Для исследования движения механизма
применяем метод планов положений. Для
этого сначала определим масштаб плана
положений
![]() по формуле:
по формуле:
![]() ,
где
,
где
![]() - истинная длина кривошипа, м;
- истинная длина кривошипа, м;
![]() - чёртёжное изображение длины кривошипа,
мм.
- чёртёжное изображение длины кривошипа,
мм.
Крайние положения механизма характеризуют границы рабочего и холостого хода. Первое крайнее положение механизма характеризует конец рабочего хода – начало холостого, и займёт свое положение, когда кривошип О1А будет лежать на одной прямой с шатуном АВ; второе крайнее положение характеризует конец холостого хода – начало рабочего. В этих положениях все скорости, кроме скорости точки А, будут равны нулю.
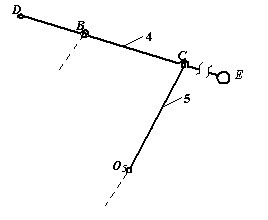
Начиная с конца рабочего хода разбиваем траекторию движения точки А (окружность) на 12 равных частей. Из точки О3 циркулем радиусом О3В ставим засечку на окружности траектории движения точки В. Из точки О5 циркулем радиусом О5С ставим засечку на окружности траектории движения точки С. Из полученной точки В ставим засечку радиусом ВС на окружности траектории движения точки С. По пропорциям строим точки D и E.
2.2 Построение плана скоростей
Рассмотрим план скоростей для второго положения.
Определяем линейную скорость точки А.
![]() ;
;
Находим масштабный коэффициент:
Определяем скорости точек, принадлежащих
группе Л.В. Ассура, состоящей из звеньев
2 и 3. Известными являются скорости
![]() .
Определяем скорость
.
Определяем скорость
![]() Для нахождения точки В составим систему
векторных уравнений:
Для нахождения точки В составим систему
векторных уравнений:
![]()
В этих уравнениях известны скорости
по
величине и направлению, скорости![]() известны только по направлению.
Графическим решением векторных уравнений
определяем скорость точки В. На плане
сил скорость точки В получилась 46,9 мм,
известны только по направлению.
Графическим решением векторных уравнений
определяем скорость точки В. На плане
сил скорость точки В получилась 46,9 мм,
![]() ,
истинная скорость точки В,
,
истинная скорость точки В,
![]() .
.
Определяем угловую скорость второго и третьего звена:
![]()
![]()
Рассматриваем вторую группу Л.В. Ассура, состоящую из звеньев 4 и 5.
Находим скорость точки С. Известными
являются скорости
![]() .
Определяем скорость
.
Определяем скорость
![]() Для нахождения точки С составим систему
векторных уравнений:
Для нахождения точки С составим систему
векторных уравнений:
![]()
В этих уравнениях известны скорости
по
величине и направлению, скорости![]() известны только по направлению.
Графическим решением векторных уравнений
определяем скорость точки С. На плане
сил скорость точки С получилась 45 мм,
известны только по направлению.
Графическим решением векторных уравнений
определяем скорость точки С. На плане
сил скорость точки С получилась 45 мм,
![]() ,
истинная скорость точки С,
,
истинная скорость точки С,
![]() .
.
Определяем угловую скорость четвертого и пятого звена:
![]()
![]() .
.
Находим скорость точки D.
Известной является скорость
![]() .
Определяем скорость
.
Определяем скорость
![]() Для нахождения точки D
составим пропорцию
Для нахождения точки D
составим пропорцию![]() ,
следовательно
,
следовательно
![]() ;
;
В этом уравнении известны скорость
![]() DB и CB по
величине и направлению, скорость
DB и CB по
величине и направлению, скорость
![]() известна только по направлению.
Графическим решением уравнения определяем
скорость точки D. На плане
сил скорость точки D
получилась 66,7 мм,
,
истинная скорость точки D,
известна только по направлению.
Графическим решением уравнения определяем
скорость точки D. На плане
сил скорость точки D
получилась 66,7 мм,
,
истинная скорость точки D,
![]()
Находим скорость точки E.
Известной является скорость
![]() .
Определяем скорость
.
Определяем скорость
![]() Для нахождения точки E
составим пропорцию отношением
Для нахождения точки E
составим пропорцию отношением
![]() ,
следовательно
,
следовательно
![]()
В этом уравнении известны скорость
![]() CE и BC по
величине и направлению, скорость
CE и BC по
величине и направлению, скорость
![]() известна только по направлению.
Графическим решением уравнения определяем
скорость точки E. На плане
сил скорость точки E
получилась 99 мм,
,
истинная скорость точки E,
известна только по направлению.
Графическим решением уравнения определяем
скорость точки E. На плане
сил скорость точки E
получилась 99 мм,
,
истинная скорость точки E,
![]()
Все линейные и угловые скорости точек в других положениях представлены в таблице №5.
Пол. |
Va, м/с |
Vb, м/с |
Vc, м/с |
Vd, м/с |
Ve, м/с |
Vba, м/с |
Vcb, м/с |
ω1, с-1 |
ω2,
с-1 |
ω3,
с-1 |
ω4,
с-1 |
ω5,
с-1 |
1 |
1,75 |
1,106 |
1,376 |
1,418 |
2,797 |
0,998 |
1,012 |
2,8 |
0,395 |
0,988 |
0,473 |
0,534 |
2 |
1,75 |
1,642 |
1,577 |
2,335 |
3,465 |
0,466 |
1,453 |
2,8 |
0,184 |
1,466 |
0,679 |
0,616 |
3 |
1,75 |
1,761 |
1,071 |
2,785 |
3,171 |
0,06 |
1,621 |
2,8 |
0,024 |
1,572 |
0,757 |
0,418 |
4 |
1,75 |
1,523 |
0,333 |
2,58 |
2,58 |
0,41 |
1,488 |
2,8 |
0,164 |
1,36 |
0,695 |
0,13 |
5 |
1,75 |
0,872 |
0,081 |
1,502 |
1,523 |
1,089 |
0,879 |
2,8 |
0,436 |
0,779 |
0,411 |
0,032 |
6 |
1,75 |
0 |
0 |
0 |
0 |
1,75 |
0 |
2,8 |
0,7 |
0 |
0 |
0 |
7 |
1,75 |
0,707 |
2,2 |
1,218 |
1,232 |
1,89 |
0,711 |
2,8 |
0,756 |
0,631 |
0,332 |
0,859 |
8 |
1,75 |
1,239 |
0,175 |
2,111 |
2,104 |
1,365 |
1,222 |
2,8 |
0,546 |
1,106 |
0,571 |
0,068 |
9 |
1,75 |
1,694 |
0,837 |
2,744 |
2,954 |
0,214 |
1,586 |
2,8 |
0,086 |
1,513 |
0,741 |
0,327 |
10 |
1,75 |
1,915 |
1,691 |
2,8 |
3,854 |
1,285 |
1,701 |
2,8 |
0,514 |
1,71 |
0,795 |
0,661 |
11 |
1,75 |
1,351 |
1,652 |
1,747 |
3,367 |
2,16 |
1,229 |
2,8 |
0,086 |
1,206 |
0,574 |
0,645 |
12(0) |
1,75 |
0 |
0 |
0 |
0 |
1,75 |
0 |
2,8 |
0,7 |
0 |
0 |
0 |