

Ідентифікація ланки
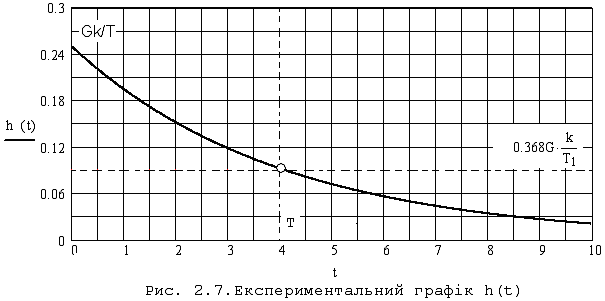
Знявши експериментально, за допомогою осцилографа, графік перехідної функції даної ланки, знайдемо коефіцієнт передачі та постійну часу .
Особливості перехідного процесу:
1)
![]() ;
;
2)
![]() .
.
Отже, постійну
часу знайдемо, провівши пряму, паралельну
осі часу, на рівні 0,368 від початкового
значення (на графіку це приблизно 0,25),
тобто:
![]() .
Отримали
с.
.
Отримали
с.
Потім знаходимо значення коефіцієнту передачі з такого співвідношення:
![]() ,
оскільки
,
оскільки
![]() В, то звідси маємо:
В, то звідси маємо:
![]() .
.
Моделювання інерційно - диференцюючої ланки за допомогою
Matlab 6.5.
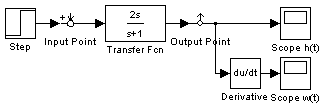
Рис. 2.8. Блок-схема реальної диференцюючої ланки.
Рис. 2.9. Вигляд перехідної та імпульсної характеристик на екрані осцилографу Simulink.

Рис. 2.10. Графіки АЧХ та АФХ реальної диференцюючої ланки.
Рис. 2.11. ЛАЧХ та ЛФЧХ реальної диференцюючої ланки.
Приклади технологічних об’єктів
Ізодром (демпфер) (рис. 2.12).
 Коефіцієнт:
Коефіцієнт:
Постійна часу:
![]() ,
,
де
![]() – коефіцієнт в’язкого тертя, Н·с/м2.
– коефіцієнт в’язкого тертя, Н·с/м2.
Приклади електромеханічних пристроїв
Т ахогенератор
(рис. 2.13).
ахогенератор
(рис. 2.13).
Представляє собою реальну диференцюючу ланку у випадку, коли вхідна і вихідна величини відповідно такі:
![]() – кутова швидкість
валу генератора, рад/с;
– кутова швидкість
валу генератора, рад/с;
– напруга на виході, В.
Коефіцієнт:
![]()
Постійна часу генератора:
![]() ,
,
де Lя, Lн – індуктивності якоря та навантаження, Гн; Rя, Rн – опори якоря та навантаження, Ом.
Диференцюючий ланцюг з динамічною ємністю (рис. 2.14).
П редставляє
собою реальну диференцюючу ланку у
випадку, коли вхідна і вихідна величини
відповідно такі:
редставляє
собою реальну диференцюючу ланку у
випадку, коли вхідна і вихідна величини
відповідно такі:
![]() – вхідна напруга,
В;
– вхідна напруга,
В;
![]() – напруга на
виході, В.
– напруга на
виході, В.
Коефіцієнт:
![]()
Постійна часу генератора:
![]() ,
,
де СD
– динамічна ємність, Ф;
 ;
j
– момент
інерції якоря, кг·м2;
ω0
– кутова швидкість ідеального холостого
ходу, рад/с;
Uя.ном
– номінальна напруга на якорі, В.
;
j
– момент
інерції якоря, кг·м2;
ω0
– кутова швидкість ідеального холостого
ходу, рад/с;
Uя.ном
– номінальна напруга на якорі, В.
Диференціальний трансформатор (рис. 2.15).
В хідна
і вихідна величини відповідно такі:
хідна
і вихідна величини відповідно такі:
![]() – напруга на вході,
В;
– напруга на вході,
В;
![]() – напруга на
виході, В.
– напруга на
виході, В.
Передаточна функція має вигляд:
Коефіцієнт:
![]()
Постійна часу:
![]() ,
,
де
![]() – індуктивність первинної обмотки
трансформатора, Гн;
– індуктивність первинної обмотки
трансформатора, Гн;
![]() – індуктивність вторинної обмотки, Гн;
– індуктивність вторинної обмотки, Гн;
![]() – індуктивний опір, Ом.
– індуктивний опір, Ом.
Приклади чотирьохполюсників
Схема |
K |
T |
|
RC |
RC |
|
R2C |
(R1+R2)C |
|
|
|
|
|
|



Чотирьохполюсники на активних елементах
Схема |
K |
T |
|
|
|

Реальна інтегруюча ланка
Мета: зняти часові характеристики, виконати математичний аналіз та провести ідентифікацію реальної інтегруючої ланки.
