9.6.2 Алгебраический критерий устойчивости Гурвица
![]() .
.
Для применения критерия
Гурвица трансформируем корни, лежащие
внутри круга единичного радиуса плоскости
в левую полуплоскость комплексной
переменной
![]() .
.
Убедится, что такое преобразование
действительно трансформирует корни
единичного радиуса в левую полуплоскость,
для этого представим
![]() ,
тогда
,
тогда
 .
.
Составим табличное соответствие
и
![]() плоскости в
плоскости в
![]()
|
|
|
|
|
|
|
|
Сделав замену
![]() ,
получим характеристический полином
для новой комплексной переменной
,
получим характеристический полином
для новой комплексной переменной
![]() .
.
Для такого полинома применим критерий устойчивости. Составим матрицу Гурвица
Для устойчивости системы по
Гурвицу необходимо и достаточно, чтобы
при положительном коэффициенте
![]() все определители матрицы Гурвица были
положительны.
все определители матрицы Гурвица были
положительны.
Пример №1. Исследовать
устойчивость системы, характеристический
полином которой имеет вид
![]() .
.
Сделав замену переменных , получим
![]() ,
,
согласно с критерием Гурвица
 .
.
Отсюда видно, что положительность коэффициентов и недостаточно для обеспечения устойчивости.
Пример №2. Исследовать
устойчивость системы, характеристический
полином которой имеет вид
![]() .
.
Сделав замену переменных , получим следующее условие устойчивости
 .
.
9.6.3 Методика исследования устойчивости системы прерывистого регулирования по корням характеристического полинома
1. Определить передаточную
функцию разомкнутой системы
![]() .
.
2. Определить передаточную функцию замкнутой системы
 .
.
3. Зная характеристический полином замкнутой системы, найдём характеристический полином разомкнутой системы
![]() .
.
Зная полином разомкнутой
системы, найдём корни
![]() .
.
4. Убедится, что для устойчивости системы все корни . Если хотя бы один корень меньше 1, то система неустойчива.
9.6.4 Методика определения устойчивости систем прерывистого регулирования по критерию Гурвица
1. Определить передаточную функцию разомкнутой системы .
2. Определить передаточную функцию замкнутой системы
.
3. Путём замены переменных , получим характеристический полином для новой комплексной переменной
.
4. Составим матрицу Гурвица
и вычислим
её определителей
![]() .
.
5. Убедится, что для устойчивости при положительности коэффициентов все определители матрицы Гурвица . Если хоты бы один равен нулю, то система будет нейтральная.
9.7 Анализ устойчивости систем прерывистого регулирования частотной плоскости
Введём понятие комплексного
коэффициента передачи прерывистой
системы
![]() ,
,
где
![]() - нормированная круговая частота,
изменяющаяся от 0 до
.
- нормированная круговая частота,
изменяющаяся от 0 до
.
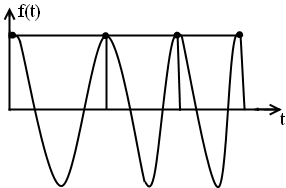
Особенностью систем прерывистого регулирования является периодичность АЧХ.

АЧХ непрерывной системы
АЧХ после дискретизации
![]()
![]()
Периодичность АЧХ можно объяснить двояко:
1. формальное (математическое объяснение)
так как
![]() ,
в силу периодичности
,
в силу периодичности
![]() и
и
![]() АЧХ будет так же периодичное;
АЧХ будет так же периодичное;
2. физическое объяснение, так
как отсчёты берутся с частотой
![]() ,
то выходной сигнал кратный
будет иметь одно и то же значение
,
то выходной сигнал кратный
будет иметь одно и то же значение