

Системи одиниць
1 кГ| = 9,8 Н 36 км/год = 10 м/сек 1 Т.е.м. = 9,8 кг
Диференціальні рівняння руху точки|точки|
Основне
рівняння динаміки
![]()
можна
записати так
![]() або так
або так
![]()
Проектуючи
рівняння
![]() на осі координат отримуємо|одержуємо|
на осі координат отримуємо|одержуємо|
![]()
![]()
![]()
оскільки|тому
що| ![]() ,
, ![]() ,
, ![]() ,
то
,
то
![]()
![]()
![]()
Окремі випадки:
а)
Точка|точка|
рухається|суне|
в площині|плоскості|.
Вибираємо в площині|плоскості|
координати xOy|,
отримуємо|одержуємо|
![]()
б)
Точка|точка|
рухається|суне|
по прямій. Вибираємо на прямій координату
Ox,|
отримуємо|одержуємо|
![]()
Основне
рівняння динаміки
![]() можна спроектувати на природні
рухомі|жваві,рухливі|
осі.
можна спроектувати на природні
рухомі|жваві,рухливі|
осі.
![]()
![]()
![]()
![]()
![]()
![]()
Ця форма рівнянь зручна для дослідження деяких випадків польоту снарядів і ракет.
Основні завдання|задачі| динаміки
Перше або пряме завдання|задача|:
Відома маса (m) точки|точки| і закон її руху, необхідно знайти силу, що діє на точку|точку|.
![]()
![]()
![]()
Обчислюємо|обчисляємо,вичисляємо| другі похідні за часом від координат точки, множимо|множимо| їх на масу і отримуємо|одержуємо| проекції сили на осі координат
![]()
![]()
![]()
Знаючи проекції сили на осі координат, визначуваний модуль сили і її направляючі|спрямовувати,скеровувати| косинуси:
![]()
![]()
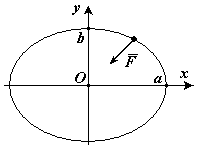
Приклад|зразок|: Рух точки|точки| в площині|плоскості| xOy| визначається рівняннями:
![]()
 ;
; ![]() ;
; ![]() ;
; ![]() час.
час.
Рішення|розв'язання,вирішення,розв'язування|:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Рисунок 1-3
![]() - рівняння
траєкторії в координатній формі (еліпс).
- рівняння
траєкторії в координатній формі (еліпс).
![]()
![]() ;
; ![]()
Друге або зворотне завдання|задача|:
Відома маса точки|точки| і сила, що діє на точку|точку|, необхідно визначити закон руху цієї точки|точки|.
Розглянемо|розглядуватимемо| рішення цієї задачі в декартовій системі координат. Сила залежить від часу, координат точки, її швидкості та інших причин.
![]() ,
, ![]() ,
,
![]()
З|із|
теорії звичайних диференціальних
рівнянь відомо, що вирішення одного
диференціального рівняння другого
порядку|ладу|
містить|утримує|
дві довільні постійні. Для випадку
системи трьох звичайних диференціальних
рівнянь другого порядку|ладу|
є|наявний|
шість довільних постійних:
![]()
Кожна
з координат
![]() рухомої точки після|потім|
інтеграції системи рівнянь залежить
від часу і всіх шести довільних
постійних, тобто
рухомої точки після|потім|
інтеграції системи рівнянь залежить
від часу і всіх шести довільних
постійних, тобто
![]()
![]()
![]()
До цих рівнянь необхідно додати|добавляти| початкові умови:
![]() ,
, ![]()
![]()
![]() ,
, ![]()
![]()
Використовуючи ці початкові умови можна отримати|одержувати| шість алгебраїчних рівнянь для визначення шести довільних постійних .
Основні види прямолінійного руху точки|точки|
Диференціальне рівняння прямолінійного руху точки|точки| уздовж|вздовж,уподовж| осі Ох має вигляд|вид|:
![]() .
Початкові умови
.
.
Початкові умови
.
Найбільш важливі|поважні| випадки
1 Сила
постійна ![]()
![]()
![]()
Маємо рух який рівномірно змінюється (рух з|із| постійним прискоренням)
2 Сила
залежить від часу ![]()
![]()
![]()
![]()
3 Сила залежить від координати або швидкості
Сила,
залежна від координати -![]() ,
створює пружні тіла при їх деформації
(наприклад, стисла або розтягнута
пружина) -
,
створює пружні тіла при їх деформації
(наприклад, стисла або розтягнута
пружина) -
Сила,
залежна від швидкості руху -![]() це сила опору (повітря, води і так далі).
це сила опору (повітря, води і так далі).
У цих випадках рішення задачі спрощується.