

Билет № 9
1.
Взаимодействие тел
Взаимодействие тел. Опыт показывает, что при сближении тел (или систем тел) характер их поведения меняется. Поскольку эти изменения носят взаимный характер, говорят, что тела взаимодействуют друг с другом. При разведении тел на очень большие расстояния (на бесконечность) все известные на сегодняшний день взаимодействия исчезают. Галилей первым дал правильный ответ на вопрос, какое движение характерно для свободных (т.е. не взаимодействующих тел). Вопреки существующему тогда мнению, что свободные тела стремятся к состоянию покоя (), он утверждал, что при отсутствии взаимодействия тела находятся в состоянии равномерного движения (), включающего покой как частный случай. Инерциальные системы отсчета. В рамках формального математического подхода, реализуемого в кинематике, утверждение Галилея выглядит бессмысленным, поскольку равномерное в одной системе отсчета движение может оказаться ускоренным в другой, которая ничем не хуже исходной. Наличие взаимодействия позволяет выделить особый класс систем отсчета, в которых свободные тела движутся без ускорения (в этих системах большинство законов природы имеют наиболее простую форму). Такие системы называются инерциальными. Все инерциальные системы эквивалентны друг другу, в любой из них законы механики проявляются одинаково. Это свойство было также отмечено Галилеем в сформулированном им принципе относительности: никаким механическим опытом в замкнутой (т.е. не сообщающейся с внешним миром) системе отсчета невозможно установить покоится ли она или равномерно движется. Любая система отсчета, равномерно движущаяся относительно инерциальной тоже является инерциальной. Между инерциальными и неинерциальными системами отсчета существует принципиальное отличие: находящийся в замкнутой системе наблюдатель способен установить факт движения с ускорением последних, не выглядывая наружу
Ускорение при взаимодействии тел
В опыте должны участвовать два тела: то, которое влияет, и то, которое подвергается этому влиянию.
Но в действительности оба тела, так сказать, «равноправны». Каждое из них и влияет на другое тело, и само подвергается влиянию. Когда, например, футболист в стремительном беге сталкивается с другим футболистом, то оба они изменяют свою скорость.
Вообще каждый раз, когда какое-нибудь тело А получает ускорение из-за того, что на него действует тело В, тело В также получает ускорение. Происходит, как говорят, взаимодействие тел, и оба они получают ускорения. Мы теперь должны выяснить, каковы эти ускорения.
Множество опытов, проведенных с различными телами, показали, что при взаимодействии двух тет их ускорения направлены всегда противоположно друг другу. Кроме того, для двух данных взаимодействующих тел отношение абсолютных значений их ускорений всегда одно и то же. Это отношение совершенно не зависит от того, как происходит взаимодействие этих тел. Это может быть столкновение двух тел; это может быть взаимодействие тех же тел, связанных между собой пружиной, нитью, проволокой; тела, наконец, могут взаимодействовать, не соприкасаясь друг с другом, как, например, взаимодействуют планеты с Солнцем или Луна с Землей, магнит с куском железа. Сами же абсолютные значения ускорений каждого из тел могут быть совершенно различными при различных взаимодействиях. Одинаково лишь отношение ускорений.
Инертность и масса
Инертность (инерция), в механике - свойство тела сохранять состояние равномерного прямолинейного движения или покоя, когда действующие на него силы отсутствуют или взаимно уравновешены. При действии неуравновешенной системы сил инерция проявляется в том, что тело изменяет свое движение постепенно и тем медленнее, чем больше его масса, являющаяся мерой инерции тела.
Тело, которое в результате взаимодействия с другим телом приобрело большее ускорение, считают менее инертным.
Масса – это свойство тела, характеризующее его инертность. При одинаковом воздействии со стороны окружающих тел одно тело может быстро изменять свою скорость, а другое в тех же условиях – значительно медленнее. Принято говорить, что второе из этих двух тел обладает большей инертностью, или, другими словами, второе тело обладает большей массой.
В международной системе единиц – СИ за единицу массы принят один килограмм 1 кг.
Килограмм определяется как масса международного прототипа килограмма, хранящегося в Париже платино-иридиевого цилиндра высотой 39 мм и диаметром 39 мм.
Таким
образом, на основании экспериментов
можно утверждать, что отношение модулей
ускорений двух взаимодействующих тел
равно обратному отношению их масс: 
Зная массу эталона mэт, измерив ускорение тела а тела и ускорение а эталона, взаимодействовавшего с ним эталона, определим массу тела:
|
На практике массу тел измеряют с помощью рычажных весов.
Первый закон Ньютона
Существуют такие системы отсчёта, называемые инерциальными, относительно которых материальная точка при отсутствии внешних воздействий сохраняет величину и направление своей скорости неограниченно долго.
Первый закон Ньютона (или закон инерции) из всего многообразия систем отсчета выделяет класс так называемых инерциальных систем.
Существуют такие системы отсчета, относительно которых изолированные поступательно движущиеся тела сохраняют свою скорость неизменной по модулю и направлению.
Свойство тел сохранять свою скорость при отсутствии действия на него других тел называется инерцией. Поэтому первый закон Ньютона называют законом инерции.
Если два тела взаимодействуют друг с другом, то в результате изменяется скорость обоих тел, т. е. в процессе взаимодействия оба тела приобретают ускорения. Отношение ускорений двух данных тел оказывается постоянным при любых воздействиях. В физике принято, что массы взаимодействующих тел обратно пропорциональны ускорениям, приобретаемым телами в результате их взаимодействия.
|

В этом
соотношении величины ![]() и
и ![]() следует
рассматривать как проекции векторов
следует
рассматривать как проекции векторов ![]() и
и ![]() на
ось OX (рис. 1.7.2).
Знак «минус» в правой части формулы
означает, что ускорения взаимодействующих
тел направлены в противоположные
стороны.
на
ось OX (рис. 1.7.2).
Знак «минус» в правой части формулы
означает, что ускорения взаимодействующих
тел направлены в противоположные
стороны.
2. 1) Равновесие
тел, имеющих ось вращения. В
повседневной жизни и технике часто
встречаются тела, которые не могут
двигаться поступательно, но могут
вращаться вокруг оси. Примерами таких
тел могут служить двери и окна, колеса
автомобиля, качели и т. д. Если вектор
силы ![]() лежит
на прямой, пересекающей ось вращения,
то эта сила уравновешивается силой
упругости
лежит
на прямой, пересекающей ось вращения,
то эта сила уравновешивается силой
упругости ![]() со
стороны оси вращения (рис. 42).
со
стороны оси вращения (рис. 42).
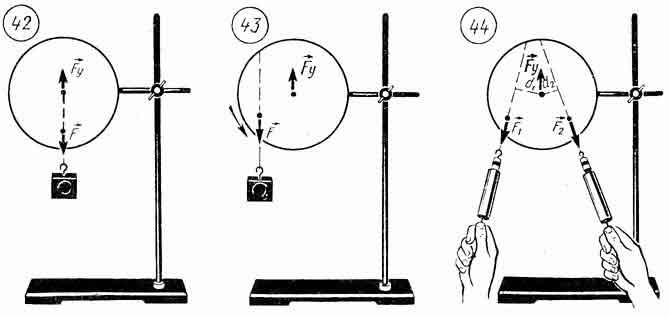
Если же прямая, на которой лежит вектор силы , не пересекает ось вращения, то эта сила не может быть уравновешена силой упругости со стороны оси вращения, и тело поворачивается вокруг оси (рис. 43).
Вращение
тела вокруг оси под действием одной
силы ![]() может
быть остановлено действием второй
силы
может
быть остановлено действием второй
силы ![]() .
Опыт показывает, что если две силы
и
по
отдельности вызывают вращение тела в
противоположных направлениях, то при
их одновременном действии тело находится
в равновесии, если выполняется условие:
.
Опыт показывает, что если две силы
и
по
отдельности вызывают вращение тела в
противоположных направлениях, то при
их одновременном действии тело находится
в равновесии, если выполняется условие:
![]() ,
,
где ![]() и
и ![]() —
кратчайшие расстояния от прямых, на
которых лежат векторы сил
и
(линии
действия сил), до оси вращения (рис. 44).
Расстояние
—
кратчайшие расстояния от прямых, на
которых лежат векторы сил
и
(линии
действия сил), до оси вращения (рис. 44).
Расстояние ![]() называется плечом
силы, а
произведение модуля силы
называется плечом
силы, а
произведение модуля силы ![]() на
плечо
называется моментом
силы
на
плечо
называется моментом
силы ![]() :
:
![]() .
(14.1)
.
(14.1)
Если моментам сил, вызывающим вращение тела вокруг оси по часовой стрелке, приписать положительный знак, а моментам сил, вызывающим вращение против часовой стрелки,— отрицательный знак, то условие равновесия тела, имеющего ось вращения, можно сформулировать в видеправила моментов: тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех приложенных к телу сил относительно этой оси равна нулю:
![]() (14.2)
(14.2)
За
единицу вращающего момента в СИ
принимается момент силы в 1 Н, линия
действия которой находится на расстоянии
1 м от оси вращения. Эту единицу
называют ньютон-метром (![]() ).
).
Общее условие равновесия тела. Объединяя два вывода, можно сформулировать общее условие равновесия тела: тело находится в равновесии, если равны нулю геометрическая сумма векторов всех приложенных к нему сил и алгебраическая сумма моментов этих сил относительно оси вращения.
При выполнении общего условия равновесия тело необязательно находится в покое. Согласно второму закону Ньютона при равенстве нулю равнодействующей всех сил ускорение тела равно нулю и оно может находиться в покое или двигаться равномерно и прямолинейно.
Равенство нулю алгебраической суммы моментов сил не означает также, что при этом тело обязательно находится в покое. На протяжении нескольких миллиардов лет с постоянным периодом продолжается вращение Земли вокруг оси именно потому, что алгебраическая сумма моментов сил, действующих на Землю со стороны других тел, очень мала. По той же причине продолжает вращение с постоянной частотой раскрученное велосипедное колесо, и только внешние силы останавливают это вращение.
Момент силы
Момент силы (синонимы: крутящий момент, вращательный момент, вертящий момент, вращающий момент) — векторная физическая величина, равная произведению радиус-вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Понятия «вращающий» и «крутящий» моменты в общем случае не тождественны, так как в технике понятие «вращающий» момент рассматривается как внешнее усилие, прикладываемое к объекту, а «крутящий» — внутреннее усилие, возникающее в объекте под действием приложенных нагрузок (этим понятием оперируют в сопротивлении материалов).
Сила приложенная к твердому телу, которое может вращаться вокруг некоторой точки, создает момент силы. Действие момента силы аналогично действию пары сил.
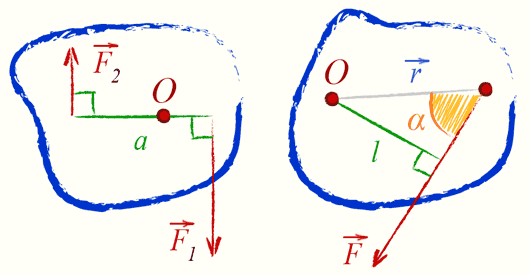
Момент силы относительно некоторой точки — это векторное произведение силы на кратчайшее расстояние от этой точки до линии действия силы.
Единица СИ момента силы:
|
[M]= Ньютон · метр |
Если: M — момент силы (Ньютон · метр), F — Приложенная сила (Ньютон), r — расстояние от центра вращения до места приложения силы (метр), l — длина перпендикуляра, опущенного из центра вращения на линию действия силы (метр), α — угол, между вектором силы F и вектором положения r, То
|
M= F·l= F·r·sin(α) |
или в виде векторного произведения
|
=
·
|
М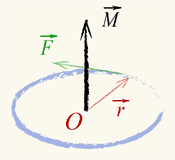 омент
силы — аксиальный
вектор.
Он направлен вдоль оси вращения.
Направление
вектора момента силы определяется
правилом буравчика, а величина его
равна M.
омент
силы — аксиальный
вектор.
Он направлен вдоль оси вращения.
Направление
вектора момента силы определяется
правилом буравчика, а величина его
равна M.