

56. Одновременный обзор по угловым координатам.
Как отмечалось на лекции №1, применение
одновременного обзора по угловым
координатам требует использования
многоканальной антенной системы, у
которой диаграмма направленности
угловых каналов перекрывают всю зону
наблюдения с шагом расстройки не более
ширины диаграммы направленности. Число
угломестных каналов
 ,
и каждый из них имеет отдельное приемное
устройство.
,
и каждый из них имеет отдельное приемное
устройство.
Многоканальная антенная система является сравнительно сложной. Примером использования таких систем являются РЛС обзора с внутриимпульсным частотным сканированием (19Ж6, 35Д6), которые осуществляют одновременный обзор по углу места.
Наиболее широкое применение на практике получил последовательный обзор, заключающийся в последовательном перемещении результирующей ДНА вдоль одной или одновременно обеих угловых координат. Различают линейные (секторный и круговой) и растровые обзоры.
57. Линейный секторный обзор.
Линейный секторный обзор производится по одной угловой координате. ДНА в плоскости обзора имеет узкую ширину (высокую разрешающую способность), а в перпендикулярной плоскости − перекрывает всю зону наблюдения:
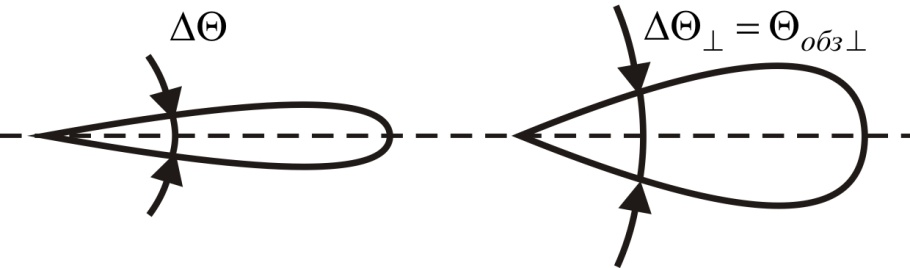
Рис. 1
Угловое положение электрической оси антенной системы при линейном законе изменяется по пилообразному закону:
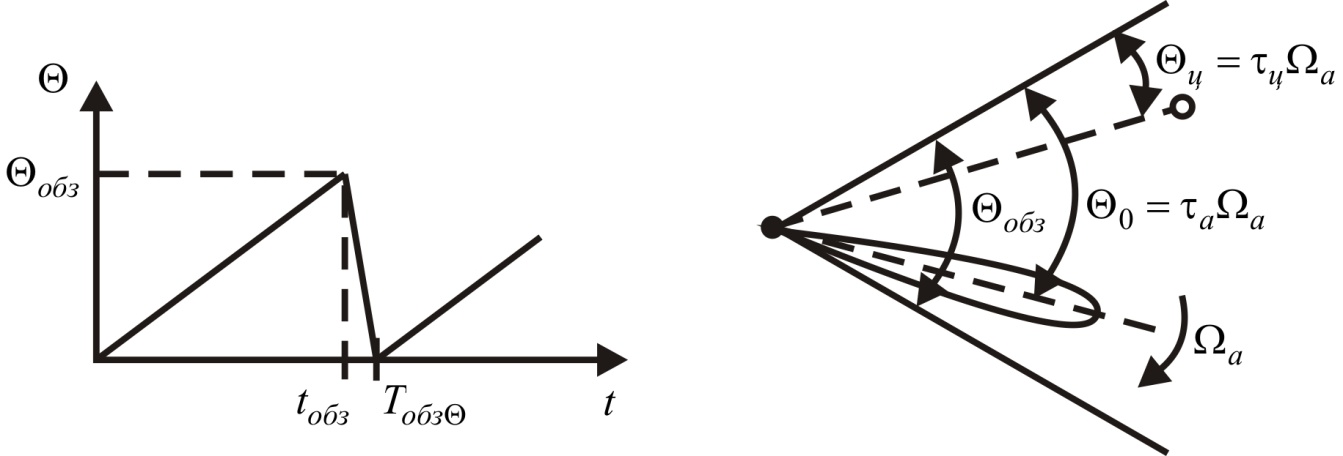
Рис. 2
Сектор шириной
 просматривается за время
просматривается за время
 .
.
В случае импульсного излучения отраженный сигнал на входе приемника представляет пачку радиоимпульсов, огибающая которой имеет форму результирующей диаграммы направленности:
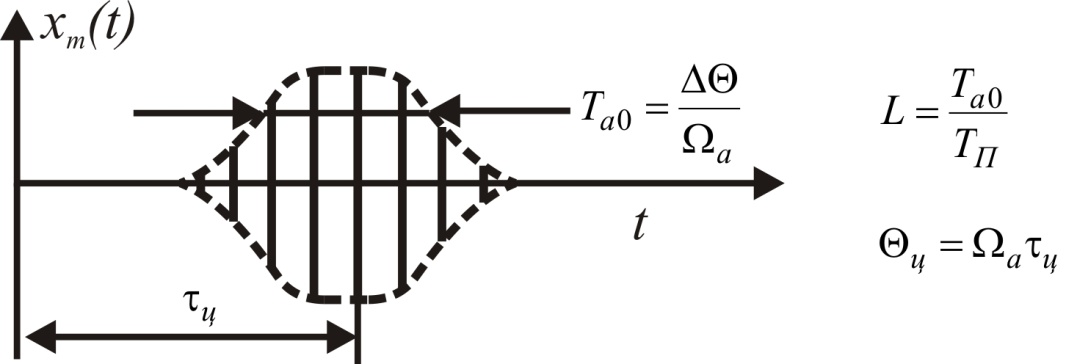
Рис. 3
Упрощенная структурная схема РЛС, реализующей секторный обзор при фильтровой обработке принятого сигнала имеет вид:
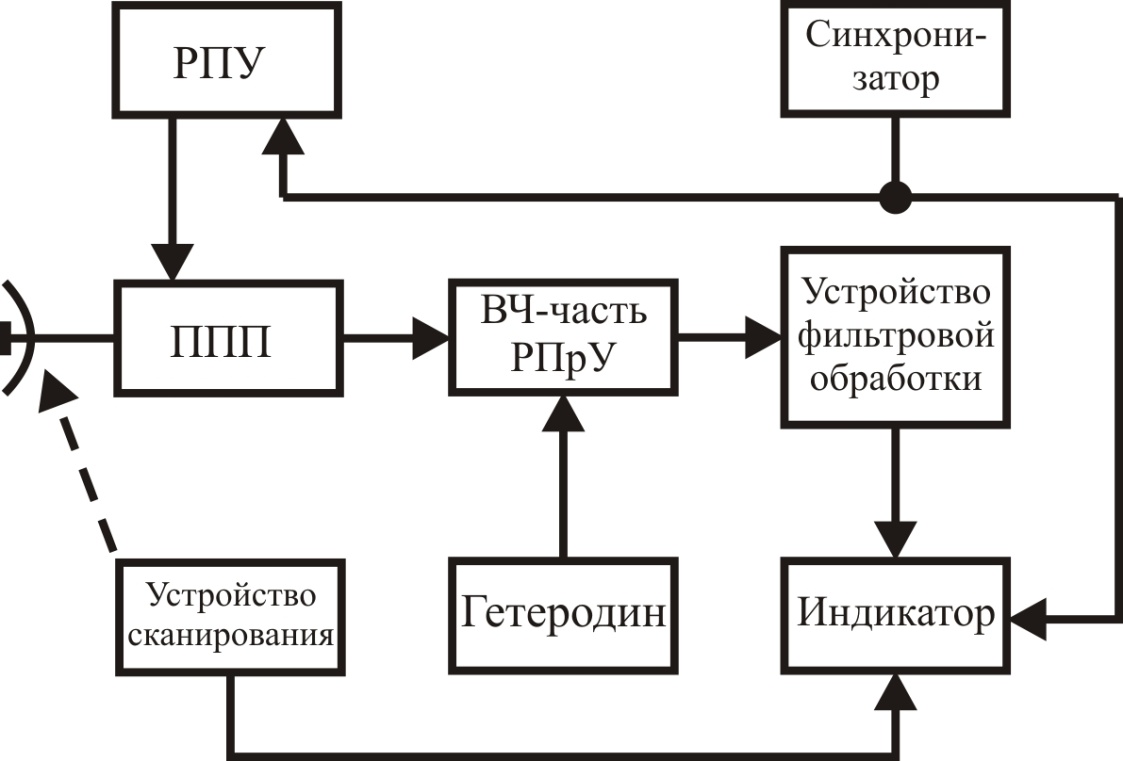
Рис. 4
Вид индикатора такой РЛС:
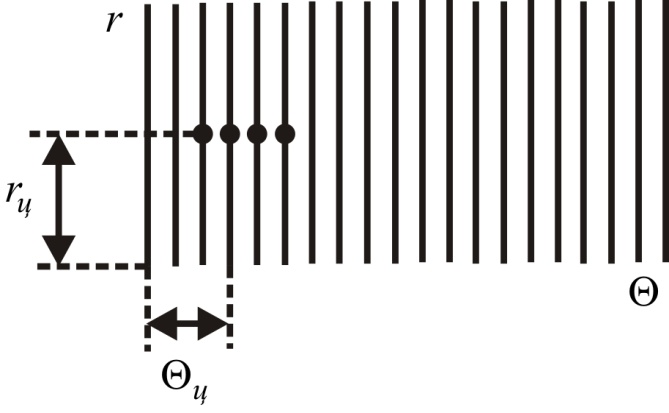
Рис. 5
Для изображения отметок от целей
используется индикатор «дальность-угол»
с прямоугольной растровой разверткой.
Строчная развертка выполняет функции
развертки дальности и начинается,
благодаря синхронизации, одновременно
с излучением зондирующего сигнала.
Перемещение развертки дальности по
«кадру» происходит синхронно с
перемещением электрической оси антенны,
а период кадровой развертки определяется
периодом обзора
 сектора.
сектора.
Отметка от цели на экране индикатора состоит из отдельных ярких точек, на нескольких соседних развертках дальностей. Ее удаление от начала строчных разверток в масштабе определяет дальность цели, а удаление середины отметки относительно начала кадровой развертки пропорционально угловой координате.
Число элементов разделения, отображаемых
на экране индикатора «дальность-угол»
с прямоугольной растровой разверткой
равно
 .
.
58. Круговой обзор. Индикатор кругового обзора.
Антенная система РЛС, осуществляющей
круговой обзор, имеет верную
 результирующую диаграмму направленности,
узкую в азимутальной и широкую в
угломестной. Вращаясь по кругу диаграмма
совершает однократный обзор зоны
наблюдения за время
результирующую диаграмму направленности,
узкую в азимутальной и широкую в
угломестной. Вращаясь по кругу диаграмма
совершает однократный обзор зоны
наблюдения за время
 .
Вид отраженного сигнала и его параметры
такие же, как и при линейном секторном
обзоре.
.
Вид отраженного сигнала и его параметры
такие же, как и при линейном секторном
обзоре.
Функциональная схема РЛС, осуществляющей круговой обзор и фильтровую обработку принятого сигнала, и вид индикатора кругового обзора покажем на рисунке:

Рис. 6