

59. Растровый обзор.
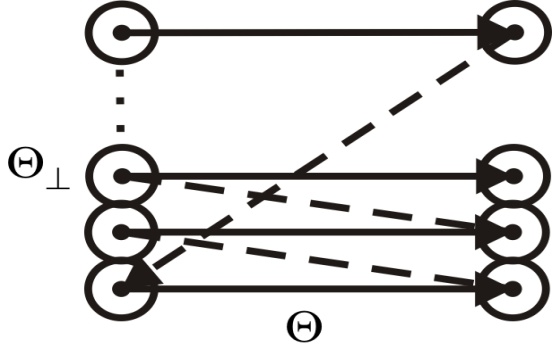
Для осуществления растрового обзора используются антенные системы (обычно ФАР) с узкими по обеим координатам, обычно игольчатыми , диаграммами направленности.
В процессе обзора эта диаграмма
направленности перемещается одновременно
в двух угловых координатах. Наиболее
часто на практике встречается строчный
растровый обзор, при котором производится
перемещение диаграммы направленности
по первой угловой координате, например
по
 ,
при фиксированном значении второй
угловой координаты, например
,
при фиксированном значении второй
угловой координаты, например
 .
После окончания обзора по
происходит дискретное смещение диаграммы
по
на величину
.
После окончания обзора по
происходит дискретное смещение диаграммы
по
на величину
 и вновь происходит обзор по
:
и вновь происходит обзор по
:
Число строк
 ,
время обзора по угловым координатам
,
время обзора по угловым координатам
 определяется временем обзора по
определяется временем обзора по
 .
Время обзора одной строки
.
Время обзора одной строки
 ,
при этом скорость перемещения ДНА по
должна быть равна
,
при этом скорость перемещения ДНА по
должна быть равна
 .
.
В таких РЛС предпочтительно использовать ФАР, так как при этом осуществляется электронное гибкое управление результирующей диаграммой направленности антенной системы. Функциональная схема такой РЛС имеет вид:
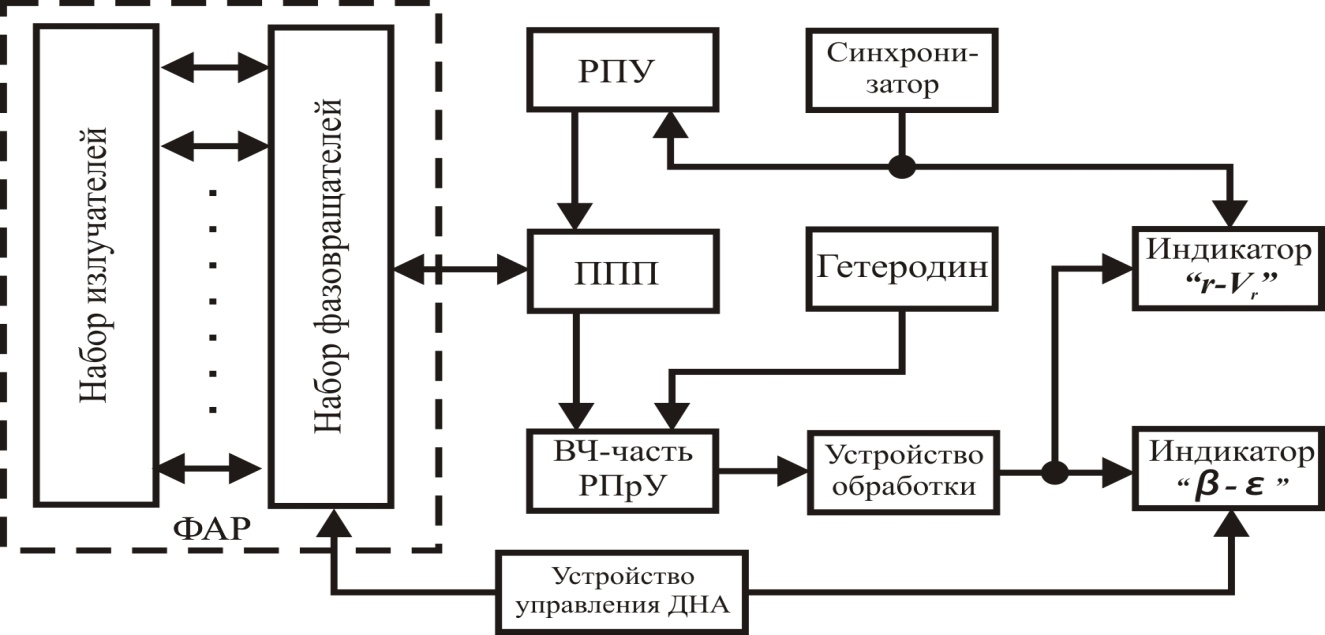
Управление положением ДНА по и осуществляется с помощью набора перестраиваемых фазовращателей.
60. Оптимизация обзора.
Оптимизация обзора сводится к минимизации среднего времени, необходимого на обзор при обеспечении заданных вероятностей правильного обнаружения и ложных тревог.
Оптимальный в этом смысле обнаружитель поочередно в каждом элементе разрешения сравнивает в j-е моменты времени выходной сигнал устройства обработки

с двумя порогами:
верхним
 и нижним
и нижним
 .
.
Решающее правило: если
 ,
то
;
если
,
то
;
если
 ,
то
,
то
 ;
если
;
если
 ,
то обнаружение продолжается и формируется
,
то обнаружение продолжается и формируется
 .
.
Этот алгоритм может быть использован в РЛС с ФАР, реализующей адаптивный обзор по угловым координатам. В такой РЛС имеется обратная связь между обнаружителем и устройством управления положения ДНА, и, следовательно, есть возможность регулирования времени, затрачивается на просмотр элемента разрешения по угловой координате.
Задача измерения (оценки) координат целей
Полагаем наличие ОС принятым достоверным фактом (цель обнаружена).
Оценка координат
и
 цели сводится к оценке параметров ОС,
в которых закодированы эти координаты
и
:
цели сводится к оценке параметров ОС,
в которых закодированы эти координаты
и
:
- закодирована в частоте Доплера ОС;

-
 закодирована во времени запаздывания
ОС;
закодирована во времени запаздывания
ОС;

- угловые координаты закодированы в пространственной структуре ОС (в ориентации фазового фронта отраженной волны).
Измерители параметров ОС взаимосвязаны друг с другом. Однако мы в целях упрощения ограничимся рассмотрением независимого измерения каждого параметра, полагая остальные параметры известными точно.
Измеряемые параметры
сигнала от движущейся цели представляют
собой случайные процессы
 .
.
При этом можно
полагать, что за сравнительно короткий
интервал времени наблюдения
 измеряемый параметр практически не
меняется.
измеряемый параметр практически не
меняется.
Поскольку измеряемый параметр является случайной величиной и закодирован в случайном сигнале, смешанным с радиолокационным фоном, то задача измерения является статистической и формулируется следующим образом.
На вход радиолокационного измерителя
(устройства оценки) поступает принятый
сигнал
 ,
содержащий ОС
,
содержащий ОС
 .
Измеритель (устройство оценки) должен
сформировать оценку
.
Измеритель (устройство оценки) должен
сформировать оценку
 измеряемого параметра
измеряемого параметра
 ОС, в котором закодирована координата
или
ОС, в котором закодирована координата
или
 цели. Причем ошибка оценки должна быть
минимальной:
цели. Причем ошибка оценки должна быть
минимальной:
 .
Все остальные параметры полагаем
известными точно.
.
Все остальные параметры полагаем
известными точно.