

3. Условия равновесия различных систем сил.
Векторными условиями равновесия для любой системы сил являются полученные ранее равенства

(главный вектор и главный момент относительно любого центра О равны нулю!). Если в явном виде расписать главный вектор и главный момент, то получим равенства:
 1616\* MERGEFORMAT ()
1616\* MERGEFORMAT ()
Аналитические (в проекциях на оси координат) условия равновесия для различных систем сил получаются проектированием векторных (16) на соответствующим образом выбранные оси координат.
3.1 Произвольная пространственная система сил.

 1717\* MERGEFORMAT ()
1717\* MERGEFORMAT ()
3.2 Произвольная плоская система сил.

 1818\* MERGEFORMAT ()
1818\* MERGEFORMAT ()
Вторая форма условий равновесия для плоской системы сил:
 1919\* MERGEFORMAT ()
1919\* MERGEFORMAT ()
Третья форма условий равновесия для плоской системы сил:
 2020\* MERGEFORMAT ()
2020\* MERGEFORMAT ()
3.3 Система параллельных сил.
Пространственная система

 2121\* MERGEFORMAT ()
2121\* MERGEFORMAT ()
Параллельные силы в одной плоскости (плоскость Oyz):
 2222\* MERGEFORMAT ()
2222\* MERGEFORMAT ()
3.4. Система сходящихся сил.
Как было доказано ранее, система сходящихся сил всегда имеет равнодействующую. Поэтому условиями равновесия системы сходящихся сил будут
 2323\* MERGEFORMAT ()
2323\* MERGEFORMAT ()
– для пространственной системы;

и
 2424\* MERGEFORMAT ()
2424\* MERGEFORMAT ()
– для плоской системы сходящихся сил.
Таким образом, получены аналитические условия равновесия для всех существующих систем сил. На практике с помощью этих условий находят какие-то неизвестные силы (чаще всего реакции опор), поэтому их называют уравнениями равновесия.
4. Равновесие системы тел. Понятие о трении
Из условий равновесия чаще всего находят неизвестные силы (реакции опор). Возможны случаи, когда число неизвестных сил не совпадает с числом условий равновесия, которые для данной системы сил можно составить.
Если число неизвестных сил равно числу условий равновесия, которые для данной системы можно составить, то такая система сил называется статически определимой.

Если число неизвестных сил превышает число условий равновесия, которые могут быть составлены для данной системы сил, то система сил называется статически неопределимой.

Однако иногда приходится рассматривать равновесие системы тел, те или иным способом соединённых вместе (сочленённые системы). Может показаться, что такие системы статически неопределимы.
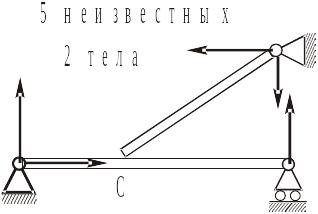

Но если рассматривать эти соединённые тела по отдельности, добавив силы взаимодействия (внутренние силы системы тел), то системы окажутся статически определимыми.


Рассмотрим равновесие тела на плоскости. Если плоскость гладкая (идеально гладкая), то любая сколь угодно малая горизонтальная сила нарушит равновесие.

Реальные поверхности (плоскости) являются шероховатыми (с трением). На них тела ведут себя под действием горизонтальных сил следующим образом.

Сила взаимодействия между телом и поверхностью, препятствующая скольжению тела по поверхности, называется силой сцепления, или силой трения покоя.
Сила взаимодействия между телом и шероховатой поверхностью при скольжении тела называется силой трения скольжения.
Как показано,

Свойства силы трения скольжения определяются законами Амонтона-Кулона:
1) Сила трения скольжения всегда направлена в сторону, противоположную направлению движения тела по поверхности.
2) Модуль силы трения скольжения пропорционален силе взаимного давления тела и поверхности (реакции поверхности)
 2525\* MERGEFORMAT ()
2525\* MERGEFORMAT ()
где
коэффициент пропорциональности
 называется коэффициентом
трения скольжения.
называется коэффициентом
трения скольжения.
3)
Коэффициент трения скольжения не зависит
от площади соприкосновения тела и
поверхности и величины реакции
 и является безразмерной величиной.
и является безразмерной величиной.
4) Коэффициент трения скольжения зависит от материалов соприкасающихся тел и физических условий окружающей среды (обработки соприкасающихся поверхностей, температуры, влажности и пр.).
Примеры.
а) сталь-сталь
 ;
б) дерево-дерево
;
б) дерево-дерево
 ;
г) автомобильная шина-сухой асфальт
;
г) автомобильная шина-сухой асфальт
 .
.
Установлено, что модуль силы сцепления также может быть представлен в виде
 2626\* MERGEFORMAT ()
2626\* MERGEFORMAT ()
где
 называют коэффициентом сцепления, или
коэффициентом трения в покое. Для
большинства материалов
называют коэффициентом сцепления, или
коэффициентом трения в покое. Для
большинства материалов
 ,
однако, разница между ними не велика
,
однако, разница между ними не велика

и
при «грубых» расчетах принимают
 .
.
Как установлено, для того, чтобы сдвинуть тело с места на шероховатой плоскости, к нему надо приложить силу, направленную вдоль плоскости, модуль которой

Если
модуль силы ,
то сдвинуть тело с места нельзя.
,
то сдвинуть тело с места нельзя.
Сила трения и нормальная реакция плоскости всегда могут быть перенесены в одну точку тела. Тогда по аксиоме параллелограмма их можно заменить равнодействующей
 2727\* MERGEFORMAT ()
2727\* MERGEFORMAT ()

Эта сила называется реакцией шероховатой поверхности. Её модуль, очевидно, равен
 2828\* MERGEFORMAT ()
2828\* MERGEFORMAT ()
Угол
между реакцией (27) и нормальной реакцией
 называется углом трения.
называется углом трения.

Угол трения легко моет быть найден:
 2929\* MERGEFORMAT ()
2929\* MERGEFORMAT ()
Поэтому вместо коэффициента трения скольжения можно задавать угол трения.
Если изменять направление смещения тела вдоль поверхности, то реакция шероховатой поверхности также будет изменять направление, и будет описывать в пространстве коническую поверхность, которую называют конусом трения.

Легко доказать, что никакой силой, расположенной внутри конуса трения, сдвинуть тело с места невозможно.

Кроме силы трения скольжения при взаимодействии тел с шероховатыми поверхностями возможно появление трения качения, которое возникает при перекатывании тела по поверхности и представляет собой пару сил, препятствующую качению тела.
Момент этой пары сил называют моментом трения качения.
Природу появления трения качения рассмотрим на примере колеса на плоскости. В действительности контакт колеса с плоскостью происходит по небольшой площадке.

Если колесо находится в покое, то давления в точках этой площадки распределяются равномерно и в сумме дают нормальную реакцию плоскости N.
Приложим теперь к центру колеса горизонтальную силу , стремящуюся сдвинуть колесо с места.

Тогда
давления в точках площадки контакта
перераспределяются: справа возрастают,
слева – уменьшаются. Их равнодействующая
проходит через центр колеса, и её можно
разложить на две составляющих: нормальную
реакцию
и силу сцепления
 .
.

Теперь нормальная реакция сдвинута от вертикали, проходящей через центр колеса, в направлении движения колеса на некоторую величину а. Следовательно, она даст момент относительно точки контакта с плоскостью, модуль которого

и который препятствует качению колеса.

Эту пару сил с указанным моментом и называют моментом трения качения, или, кратко, трением качения.
Величина а в формуле для момента трения качения
 3030\* MERGEFORMAT ()
3030\* MERGEFORMAT ()
называется коэффициентом трения качения. В отличие от коэффициента трения скольжения этот коэффициент имеет размерность длины ( в таблицах – как правило, в см, или в безразмерном виде, как отношение a/R, где R – радиус колеса). Свойства коэффициента трения качения определяются законами, подобными законам Кулона для коэффициента трения скольжения.
Таким образом, при качении колеса по шероховатой плоскости на него начинают действовать:
– сила трения скольжения
3131\* MERGEFORMAT ()
препятствующая скольжению колеса;
– момент трения качения
3232\* MERGEFORMAT ()
препятствующий качению колеса.
Для того, чтобы колесо начало скользить по плоскости (поступательно), сила должна удовлетворять условию

а для того, чтобы началось качение, нужно

Для большинства материалов твердых тел справедливо соотношение

поэтому
качение начинается раньше, или, другими
словами, «катить» всегда легче, чем
«тащить». Например, для стального колеса
на стальном рельсе:
 .
.