

Лекция 4
Понятие о сферическом и свободном движениях твёрдого тела.
Общие понятия сложного движения точки.
Вопросы лекции.
Понятие о движении тела с одной неподвижной точкой (сферическом движении).
Понятие о движении свободного твёрдого тела.
Общие понятия сложного движения точки.
Понятие о движении тела с одной неподвижной точкой (сферическом движении).
1.1 Общие понятия
Движение
твёрдого тела с одной неподвижной точкой
в определении не нуждается. Пусть точка
О тела остаётся неподвижной:
 для
для
 .
.
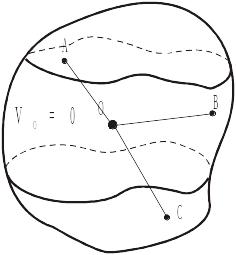
Рассмотрим любые другие точки тела, не совпадающие с неподвижной, например, А, В, С.
Т.к.
 ,
то эти точки могут двигаться только по
сферическим поверхностям с общим центром
в неподвижной точке О и с радиусами,
равными расстояниям от центра О до
данной точки. Очевидно, что то же самое
можно сказать и о любой другой точке
этого тела.
,
то эти точки могут двигаться только по
сферическим поверхностям с общим центром
в неподвижной точке О и с радиусами,
равными расстояниям от центра О до
данной точки. Очевидно, что то же самое
можно сказать и о любой другой точке
этого тела.
Из этого факта происходит другое, не официальное, название движения твёрдого тела с одной неподвижной точкой: сферическое движение.
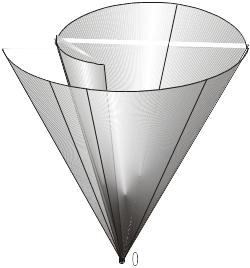
Итак, траектории всех точек тела при сферическом движении расположены на сферических поверхностях с общим центром в неподвижной точке. Но траектории могут быть весьма сложными кривыми. Примеры:
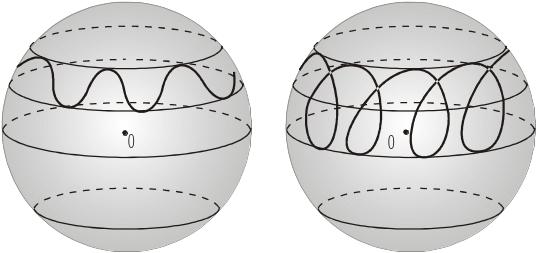 .
.
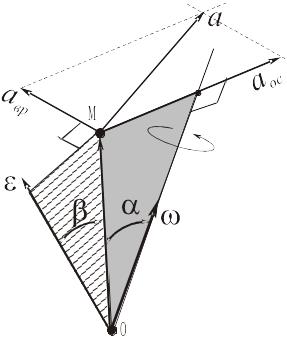
Можно доказать, что в движение тела представляет собой поворот на бесконечно малый угол вокруг оси, проходящей через неподвижную точку
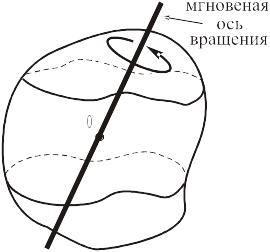
и называемой мгновенной осью вращения (М.О.В.).
При этом сама МОВ меняет положение в пространстве, поворачиваясь вокруг неподвижной точки. Таким образом, сферическое движение тела – это сумма двух вращений: тела вокруг МОВ и самой МОВ вокруг неподвижной точки.
Поскольку тело поворачивается вокруг МОВ, то его угловая скорость направлена вдоль мгновенной оси вращения
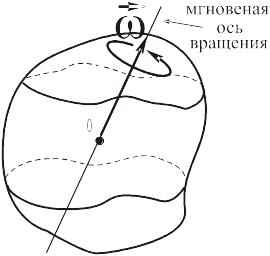
и называется мгновенной угловой скоростью тела.
Производная от мгновенной угловой скорости тела
 11\* MERGEFORMAT ()
11\* MERGEFORMAT ()
называется мгновенным угловым ускорением тела.
В
отличие от вращательного движения тела
вектор
 мгновенного углового ускорения не
направлен
вдоль МОВ. Действительно, мгновенная
ось вращения меняет своё положение в
пространстве, всё время проходя через
неподвижную точку тела, следовательно,
– она описывает коническую поверхность
мгновенного углового ускорения не
направлен
вдоль МОВ. Действительно, мгновенная
ось вращения меняет своё положение в
пространстве, всё время проходя через
неподвижную точку тела, следовательно,
– она описывает коническую поверхность
 .
.
Мгновенная
угловая скорость направлена вдоль МОВ,
поэтому она также расположена на этой
конической поверхности и, изменяясь по
модулю, описывает на этой поверхности
некоторую кривую (траекторию конца
вектора
 ,
называемую годографом
вектора)
,
называемую годографом
вектора)
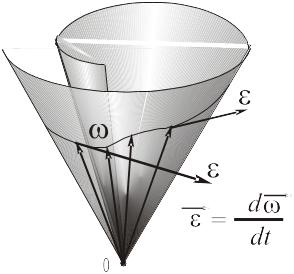
По аналогии с формулой для вектора скорости точки

заключаем, что вектор мгновенного углового ускорения тела направлен по касательной к годографу мгновенной угловой скорости.
Вопрос о том, как практически определять векторы и будет рассмотрен позже.
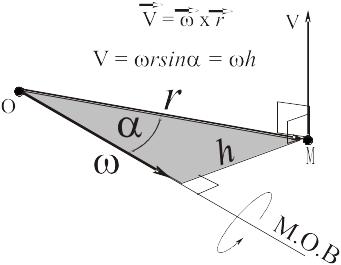
Скорость и ускорение точки тела при сферическом движении
Т.к. в сферическое движение – это вращение вокруг МОВ, то
 22\* MERGEFORMAT ()
22\* MERGEFORMAT ()
 33\* MERGEFORMAT ()
33\* MERGEFORMAT ()
как при вращательном движении, но и – мгновенные угловая скорость и угловое ускорение соответственно.
Согласно (2) модуль скорости равен
 44\* MERGEFORMAT ()
44\* MERGEFORMAT ()
где
 расстояние
от точки до МОВ.
расстояние
от точки до МОВ.
Согласно (3) вектор ускорения точки тела равен сумме двух слагаемых:
 55\* MERGEFORMAT ()
55\* MERGEFORMAT ()
называемым вращательным ускорением точки, и
 66\* MERGEFORMAT ()
66\* MERGEFORMAT ()
называемым осестремительным ускорением точки.
Их модули находятся по формулам:
 77\* MERGEFORMAT ()
77\* MERGEFORMAT ()
 88\* MERGEFORMAT ()
88\* MERGEFORMAT ()
где h – то же, что и в формуле (4) для модуля скорости.
Формула (3) в силу введённых обозначений (5) и (6) может быть записана в виде
 99\* MERGEFORMAT ()
99\* MERGEFORMAT ()
Углы Эйлера
Задавать сферическое движение тела можно различными способами. Одним из наиболее простых является задание движения с помощью углов Эйлера.
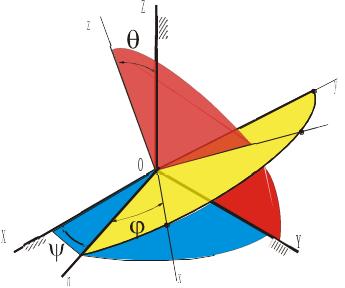
Система координат OXYZ – не подвижна в пространстве. Система Oxyz жестко связана с твёрдым телом и движется вместе с ним.
Линия пересечения n подвижной Oxy и неподвижной OXY плоскостей называется линией узлов (все названия взяты из астрономии).
Положение
линии узлов в неподвижной плоскости
можно определить углом
 ,
который называется углом
прецессии.
,
который называется углом
прецессии.
Величина
наклона подвижной плоскости Oxy к
неподвижной OXY задаётся углом
 ,
называемым углом
нутации.
,
называемым углом
нутации.
Положение
оси Ox (или Oy) в подвижной плоскости
определяется углом
 ,
называемым углом
собственного вращения.
,
называемым углом
собственного вращения.
Три введенных угла , и полностью определяют положение подвижных осей Oxyz относительно неподвижных OXYZ, а, следовательно,– и положение всех точек тела.
Если три угла Эйлера определить как функции от времени t, то положение тела будет известно в любой момент. Таким образом, функции
 1010\* MERGEFORMAT ()
1010\* MERGEFORMAT ()
задают закон сферического движения тела в углах Эйлера.
Если функции (10) известны, то можно вычислить производные. Тогда получим
 1111\* MERGEFORMAT ()
1111\* MERGEFORMAT ()
угловую скорость прецессии;
 1212\* MERGEFORMAT ()
1212\* MERGEFORMAT ()
угловую скорость нутации и
 1313\* MERGEFORMAT ()
1313\* MERGEFORMAT ()
угловую скорость собственного вращения. Векторы этих угловых скоростей показаны на рисунке.
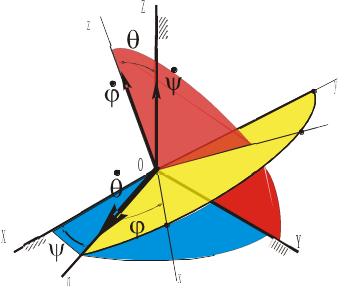
Очевидно, что
 1414\* MERGEFORMAT ()
1414\* MERGEFORMAT ()
где
 орты
осей Z, n,
z
соответственно.
орты
осей Z, n,
z
соответственно.
Равенство (14) проектируют на оси подвижной, или неподвижной, систем координат и находят вектор мгновенной угловой скорости тела по его проекциям на оси. Вычисляя производные от проекций мгновенной угловой скорости, находят проекции углового ускорения, а, следовательно, и сам вектор.