

4.3. Энергетические показатели гистерезисных машин
Энергетические
показатели гистерезисного микродвигателя
не особенно высоки (![]() ),
так как поток ротора является вторичным,
наведенным рабочим потоком статора
и работа такого двигателя соответствует
режиму синхронной машины с недовозбуждением.
Низкие энергетические показатели
гистерезисных машин и, в частности,
гистерезисных двигателей – главный их
недостаток.
),
так как поток ротора является вторичным,
наведенным рабочим потоком статора
и работа такого двигателя соответствует
режиму синхронной машины с недовозбуждением.
Низкие энергетические показатели
гистерезисных машин и, в частности,
гистерезисных двигателей – главный их
недостаток.
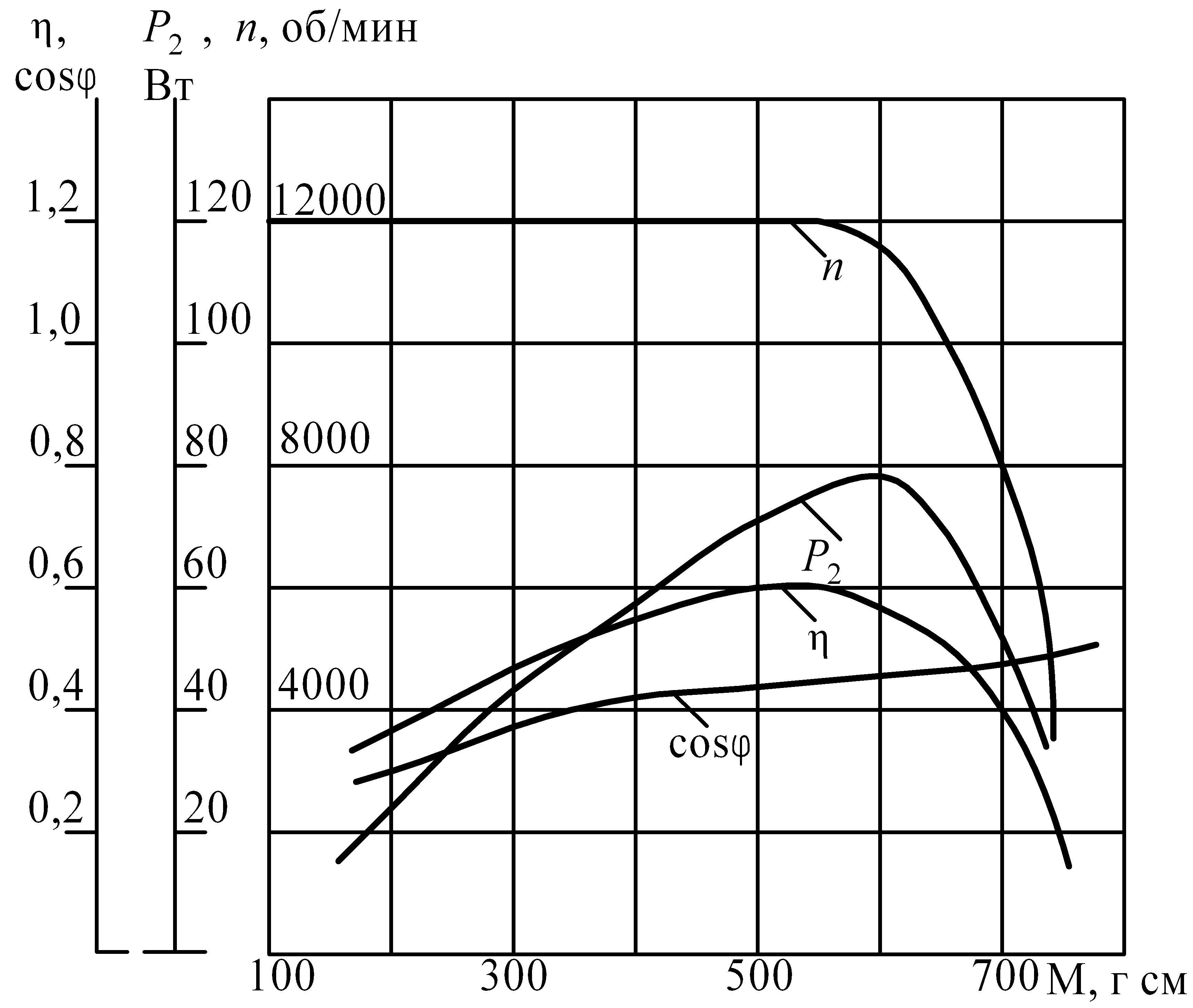
Рис. 4.8. Рабочие характеристики гистерезисного двигателя
Низкие энергетические показатели связаны с большим реактивным намагничивающим током, потребляемым обмоткой статора из сети. В асинхронном режиме это обусловлено большим магнитным сопротивлением гистерезисного слоя из магнитотвердого материала.
Поясним
это на примере зависимости тока I1
гистерезисного
микродвигателя в синхронном режиме от
напряжения возбуждения U1,
при снижении
последнего от величины U1П,
при которой
происходит пуск (см. рис. 4.9). Величина
возбужденной МДС ротора определяется
напряжением пуска U1П,
а величина результирующего потока
двигателя уменьшается пропорционально
U1.
Значит, при
уменьшении U1/U1П
возрастает роль МДС ротора в создании
результирующего магнитного поля и
меняется величина и характер тока
статора. Индуктивная намагничивающая
составляющая тока статора (![]() > 0)
постепенно уменьшается до нуля (
= 0)
и затем появляется размагничивающая
емкостная составляющая (
< 0).
Эта зависимость по своей физической
сути аналогична U-образной
характеристике синхронного микродвигателя
с электромагнитным возбуждением.
> 0)
постепенно уменьшается до нуля (
= 0)
и затем появляется размагничивающая
емкостная составляющая (
< 0).
Эта зависимость по своей физической
сути аналогична U-образной
характеристике синхронного микродвигателя
с электромагнитным возбуждением.

Рис. 4.9. U-образная характеристика гистерезисного микродвигателя
В
синхронном режиме низкий
![]() обусловлен низкой намагниченностью
гистерезисного слоя, в результате чего
гистерезисный двигатель работает как
сильно недовозбужденный синхронный
двигатель.
обусловлен низкой намагниченностью
гистерезисного слоя, в результате чего
гистерезисный двигатель работает как
сильно недовозбужденный синхронный
двигатель.
Поскольку
основной рабочий режим двигателя –
синхронный, а асинхронный является
лишь пусковым и длится доли секунды, то
важно повышать энергетические показатели
в синхронном режиме. Одним из методов
является так называемое «перевозбуждение»
двигателя. Поскольку магнитная индукция
вершины гистерезисной петли
![]() до которой
намагничен гистерезисный слой в
синхронном режиме, определяется
напряжением, подведенным к двигателю
до которой
намагничен гистерезисный слой в
синхронном режиме, определяется
напряжением, подведенным к двигателю
![]() ,
то «перевозбуждение»
заключается в кратковременном (в течение
нескольких периодов переменного
тока) повышении напряжения в 2-3 раза по
сравнению с номинальным, после чего его
вновь снижают до номинального уровня.
В результате ротор оказывается
намагниченным до больших индукций,
увеличивается значение ЭДС холостого
хода Е0
и снижается
реактивный намагничивающий ток, в связи
с чем повышаются энергетические
показатели.
,
то «перевозбуждение»
заключается в кратковременном (в течение
нескольких периодов переменного
тока) повышении напряжения в 2-3 раза по
сравнению с номинальным, после чего его
вновь снижают до номинального уровня.
В результате ротор оказывается
намагниченным до больших индукций,
увеличивается значение ЭДС холостого
хода Е0
и снижается
реактивный намагничивающий ток, в связи
с чем повышаются энергетические
показатели.
Подмагниченный ротор, как и ротор с постоянными магнитами обычного синхронного микродвигателя, начинает больше участвовать в создании основного рабочего магнитного потока и тем самым разгружать обмотку статора от реактивного намагничивающего тока. Это соответствует смещению рабочей точки характеристики двигателя из А в В на рис. 4.9.
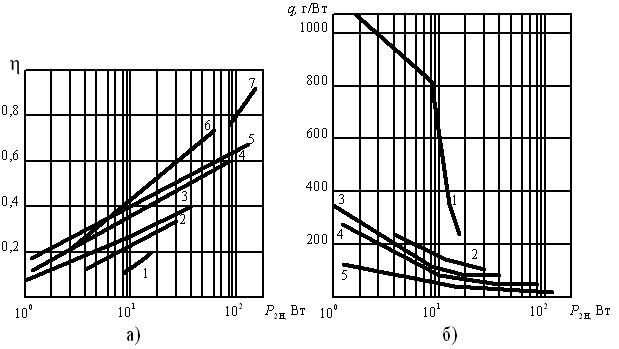
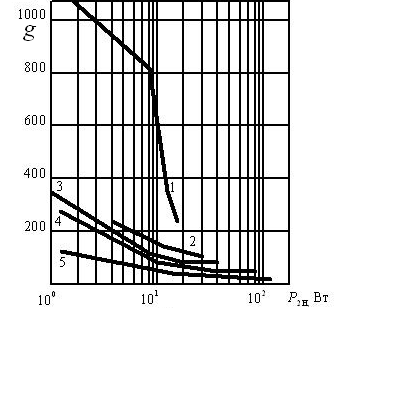
На рис. 4.10 приведены энергетические и весовые показатели гистерезисных микродвигателей в сравнении с теми же показателями некоторых серийных синхронных микродвигателей.
Наиболее
высокие энергетические показатели (КПД
и коэффициент мощности) и наименьший
вес g
на единицу
номинальной мощности имеют
микродвигатели активного типа с
постоянными магнитами. При частоте
напряжения питания 50 Гц в диапазоне
мощностей 10-100 Вт,
![]() =40-80%
(меньшие значения относятся к двигателям
меньшей мощности). Затем идут гистерезисные
микродвигатели, режим которых, как
указывалось, соответствует работе
синхронной машины с недовозбуждением.
При тех же условиях их КПД
=30-50%.
Наихудшие показатели имеют реактивные
микродвигатели, у которых поток
возбуждения ротора вообще отсутствует.
В указанных условиях их КПД
=20-40%.
=40-80%
(меньшие значения относятся к двигателям
меньшей мощности). Затем идут гистерезисные
микродвигатели, режим которых, как
указывалось, соответствует работе
синхронной машины с недовозбуждением.
При тех же условиях их КПД
=30-50%.
Наихудшие показатели имеют реактивные
микродвигатели, у которых поток
возбуждения ротора вообще отсутствует.
В указанных условиях их КПД
=20-40%.
Коэффициент мощности существенно зависит от схемы включения двигателя: трехфазной или однофазной с конденсатором. Коэффициент мощности, весьма низкий из-за собственных свойств у реактивных и гистерезисных микродвигателей (порядка 0,3-0,5 в трехфазном режиме), в конденсаторной схеме включения выше и примерно такой же, как у микродвигателей с постоянными магнитами (порядка 0,6-0,9).
а
б
Рис. 4.10. Зависимость КПД (а) и веса на единицу номинальной мощности (б) от номинальной мощности синхронных микродвигателей:
1 – реактивные; 2 – гистерезисные с однофазной схемой включения и частотой 50 Гц;
3 – гистерезисные с однофазной схемой включения и частотой 400 Гц;
4 – гистерезисные с трехфазной схемой включения и частотой 50 Гц;
5 – гистерезисные с трехфазной схемой включения и частотой 400 Гц;
6 – активного типа с постоянными магнитами и частотой 50 Гц;
7 – активного типа с постоянными магнитами и частотой 400 Гц
Синхронные микродвигатели, предназначенные для работы от сети с повышенной частотой (400 и 1000 Гц), могут иметь лучшие показатели КПД и веса, чем при частоте 50 Гц.