

1. Кинематика – раздел механики изучающий механическое движение вне зависимости от причин его вызывающих.
Траектория – это линия по которой движется тело.
Характеристики траектории:
а) путь– длина траектории;
б) перемещение– вектор соединяющий начальную и конечную точки траектории.
Основная задача кинематики – определить положение тела в любой момент времени по заданному начальному положению и начальной скорости.
Состояние в механике определяется набором координат и скоростей всех тел, принадлежащих системе. Для задания состояния одной материальной точки определяется 6 параметров: 3 координаты и 3 проекции скорости (x,y,z),(Vx,Vy,Vz).
Закон движения – это математическая зависимость координат тела (системы тел) от времени при наличии значений начальных координат и скорости.
Если начальные координаты и скорости не заданы, то зависимость называется уравнением движения.
Обратная задача кинематики состоит в определении скоростей и ускорений по заданным законам движения.
Скорость
Скорость – это физическая величина, характеризующая изменение положения тела с течением времени.
Виды скоростей:
а)
средняя
путевая скорость:
![]() где
S
— весь путь, t—всё
время движения. Как видно из определения,
средняя путевая скорость является
скалярной величиной, то есть не имеет
направления;
где
S
— весь путь, t—всё
время движения. Как видно из определения,
средняя путевая скорость является
скалярной величиной, то есть не имеет
направления;
б)средняя
скорость по перемещению:
![]() где
где
![]() —всё
перемещение, t
– всё время движения.
—всё
перемещение, t
– всё время движения.
в)
мгновенная
скорость![]()
Мгновенная скорость – это скорость в данный момент времени в данной точке траектории. Виды движения материальной точки
а) Классификация движения по траектории:
— Прямолинейное движение – траекторией является прямая линия.
— Криволинейное движение – траекторией является произвольная кривая линия.
— Движение по окружности – частный случай криволинейного движения, когда траекторией является окружность.
б)Классификация движения по скорости
— Равномерное
движение – движение со скоростью,
постоянной по величине, то есть
![]()
— Равнопеременное движение – движение со скоростью, величина которой изменяется по линейному закону. При неравномерном движении вводится понятие ускорения.
Ускорение
–
физическая величина, характеризующая
изменение скорости с течением времени.
![]()
То есть, мгновенное ускорение – первая производная скорости по времени.
Другими словами, мгновенное ускорение – вторая производная перемещения по времени.
Математическое
задание равнопеременного движения
выражается следующим образом:
![]()
—Колебательное движение.
—Движение с произвольным образом изменяющейся скоростью.
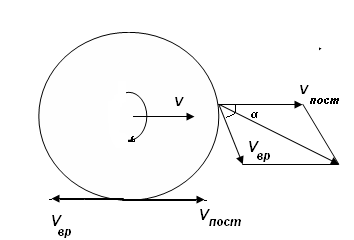
2. Центростремительное ускорение
Рассмотрим
движение с постоянной по модулю скоростью
т.е.
![]()
![]()
Ускорение направленное к центру называется центростремительным или нормальным.

Тангенциальное (касательное) и полное ускорение
Пусть скорость тела изменяется
Плоское вращение – все точки перемещаются в параллельных плоскостях
ω— угловая скорость
![]() [рад/с]
[рад/с]
ω=const — равномерное движение по окружности
4. Степени свободы и обобщённые координаты
Степенями свободы называются все возможные зависимые перемещения механической системы.
Обобщённые координаты— набор параметров полностью характеризующих положение всех элементов системы.
Число степеней свободы равно количеству обопщённых координат введённых для описания системы.
Пример: Одна материальная точка (x1,y1,z1): три степени свободы, три обобщённые координаты
Две
материальные точки: 6 степеней свободы![]()
Три материальных точки: 9 степеней свободы.
Для N несвязных материальных точек число степеней свободы (і) i=3N
Связями называются ограничения на возможные движения систем.
Количество степеней свободы для системы со связями
i=3N-m, где m— количество связей;
Пример: стержень длиной l— физическое задание математически
![]()
![]()
Количество степеней свободы для АТТ:
Любое абсолютно твёрдое тело обладает шестью степенями свободы:
3— поступательные вдоль оси x, y, z.
3— вращательные вокруг осей x, y, z.
![]()
5. Динамика— раздел физики изучающий взаимодействия.
Взаимодействие— влияние объектов друг на друга, которое определяет характер их движения.
Сила— физическая величина, характеризующая взаимодействие[F]=H
Сила характеризуется:— величиной;— направлением; — точкой приложения;
Инерция—явление сохранения скорости телом в случае, когда на него не действуют силы или их действие скомпенсировано.
Инертность—свойства тел сохранять свою скорость.
Масса—физическая величина характеризующая инертность. Данная масса называется инертной. M[кг]
Первый закон Ньютона
Системы отсчёта относительно которых тело движется равномерно и прямолинейно либо покоится, если на него не действуют другие тела или их действия скомпенсировано называются инерциальными(ИСО).
Закон:
Инерциальные системы существуют (постулат)
Примеры ИСО:
а) ИСО связана с землёй обладает большой степенью не инерциальности, но пригодно для решения задач.
б) система отсчёта с солнцем является более инерциальной, её выбирают тогда, когда нужно учитывать вращение Земли вокруг оси.
в) ИСО связана с удалёнными звёздами являются максимально близкой к инерциальной.
Второй закон Ньютона
В ИСО ускорение тела прямо пропорционально равнодействующей всех сил действующих на тело и обратно пропорционально массе тела (для матер. точки).
![]() ,где
F—равнодействующая
сила;
,где
F—равнодействующая
сила;

Третий закон Ньютона.
При взаимодействии они действуют друг на друга с силами одинаковыми по величине и противоположными по направлению, при этом силы направлены вдоль одной прямой и имеют одинаковую физическую природу.
![]()
6. СИ— международная система единиц, современный вариант метрической системы. СИ является наиболее широко используемой системой единиц в мире, как в повседневной жизни, так и в науке и технике. В настоящее время СИ принята в качестве основной системы единиц большинством стран мира и почти всегда используется в области техники.
Границы применимости классической механики
а) число объектов в системе отсчёта должно быть невелико (иначе – необходимо использовать законы статической механики и термодинамики);
б) скорости движения систем (и их элементов) должны быть во много раз меньше скорости света (иначе – переход к специальной теории относительности Эйнштейна);
в) размеры систем должны быть во много раз больше размеров атома (иначе – переход к описанию явлений на основе законов квантовой механики);
г) интенсивность взаимодействия не должна быть высока (не допустимо рождение частиц, иначе – переход к квантовой теории поля и общей теории относительности).
Отметим, что все указанные выше теории являются более общими, чем классическая механика, но они не отрицают законов классической физики, а при соответствующих условиях согласованы с ними.
7. Закон сохранения импульса импульс замкнутой системы сохраняется т е не изменяется с течением времени p =mj*v j=const это фундаментальн закон природы Он является следствием однородности пространства
Закон сохранения импульса
Система называется замкнутой, или на неё не действуют внешние силы(или их действие скомпенсировано).
![]() замкнутая
система
замкнутая
система
 Закон
сохранения импульса
(***)
Закон
сохранения импульса
(***)
Полный импульс замкнутой системы сохраняется при любых взаимодействиях тел в нутрии системы.
б) Для двух тел равенство(***) может быть записано в виде
![]()
где
V1 и V2—скорость до взаимодействия
![]() —
скорость
тел после взаимодействия
—
скорость
тел после взаимодействия
в) Закон сохранения импульса следует из однородности пространства.
8. Момент импульса - это физическая величина, определяемая векторным произведением L=[r*P], где r – радиус-вектор, P=mυ – импульс материальной точки.
Закон сохранения момента импульса.
Система называется замкнутой, если на неё действуют внешние моменты или их действие скомпенсировано.
![]() — закон
сохранения магнита импульса
— закон
сохранения магнита импульса
Закон сохранения момента импульса:
Полный момент импульса замкнутой системы сохраняется при любых взаимодействиях внутри системы
Следствие: Т.к. АТТ можно рассматривать как систему материальных точек жёстко связанных друг с другом, то момент импульса АТТ будет сохранятся, если на него не действуют внешние моменты сил.
Примеры проявления закона сохранения момента импульса
а)Скамья Жуковского(Фигуристка на льду)
б) Электродвигатель