

В. Г. Пидодня, о.А. Краснова «кинематический анализ многозвенного механизма»
Практикум
к выполнению расчетно-графической работы
по курсу «Теоретическая механика»
УДК
Составители: О.А. Краснова, В. Г. Пидодня
«Кинематический анализ многозвенного механизма». Практикум к выполнению расчетно-графической работы по курсу «Теоретическая механика»/ Самар.гос.техм.ун-т: Сост.: В.Г.Пидодня, О.А. Краснова. Самара, 2007. 18 с.
Работа предназначена для студентов высших учебных заведений технического профиля.
Задания на расчетно-графическую работу по кинематике плоского движения твердого тела разработаны на кафедре технической механики. Методические указания включают содержание и последовательность выполнения задания, пример выполнения и контрольные вопросы.
Плоское движение твердого тела является одной из наиболее важных тем теоретической механики, находящей широкое применение при изучении последующих разделов кинематики и динамики, а также в теории механизмов и машин.
Основы теории плоского движения
Плоским (плоскопараллельным) называется движение твердого тела, при котором все его точки движутся в плоскостях, параллельных некоторой неподвижной плоскости (плоскости движения).
При плоском движении тела любая прямая AA′, проведенная перпендикулярно к плоскости движения, движется поступательно. Следовательно, проекции всех точек этой прямой будут тождественны, а скорости и ускорения – геометрически равны (рис. 1).

Рис. 1.
На основании этого, задание и изучение плоского движения тела сводится к заданию и изучению движения одного из его сечений, полученного от пересечения тела плоскостью параллельной плоскости движения.
Задание
движения плоской фигуры в плоскости
Oxy сводится к заданию координат одной
из точек A –![]() и угла поворота фигуры -
и угла поворота фигуры -
![]() вокруг этой точки (рис. 2).
вокруг этой точки (рис. 2).

Рис.2.
Следовательно, уравнения движения плоской фигуры имеют вид
Плоское движение тела (плоской фигуры) можно рассматривать как сложное и состоящее из поступательного (переносного) движения вместе с произвольной точкой A (полюсом) и вращательного (относительного) движения вокруг этого полюса.
Скорости точек плоской фигуры при плоском движении определяются по теореме распределения скоростей
![]() (1)
(1)
где
![]() - искомая скорость точки B,
- искомая скорость точки B,
![]() - известная скорость
точки А, выбранной за полюс,
- известная скорость
точки А, выбранной за полюс,
![]()
![]() - скорость точки
B в относительном вращательном движении
вокруг полюса А, направленная
перпендикулярно отрезку AB в сторону
мгновенного вращательного движения
фигуры (рис. 3).
- скорость точки
B в относительном вращательном движении
вокруг полюса А, направленная
перпендикулярно отрезку AB в сторону
мгновенного вращательного движения
фигуры (рис. 3).
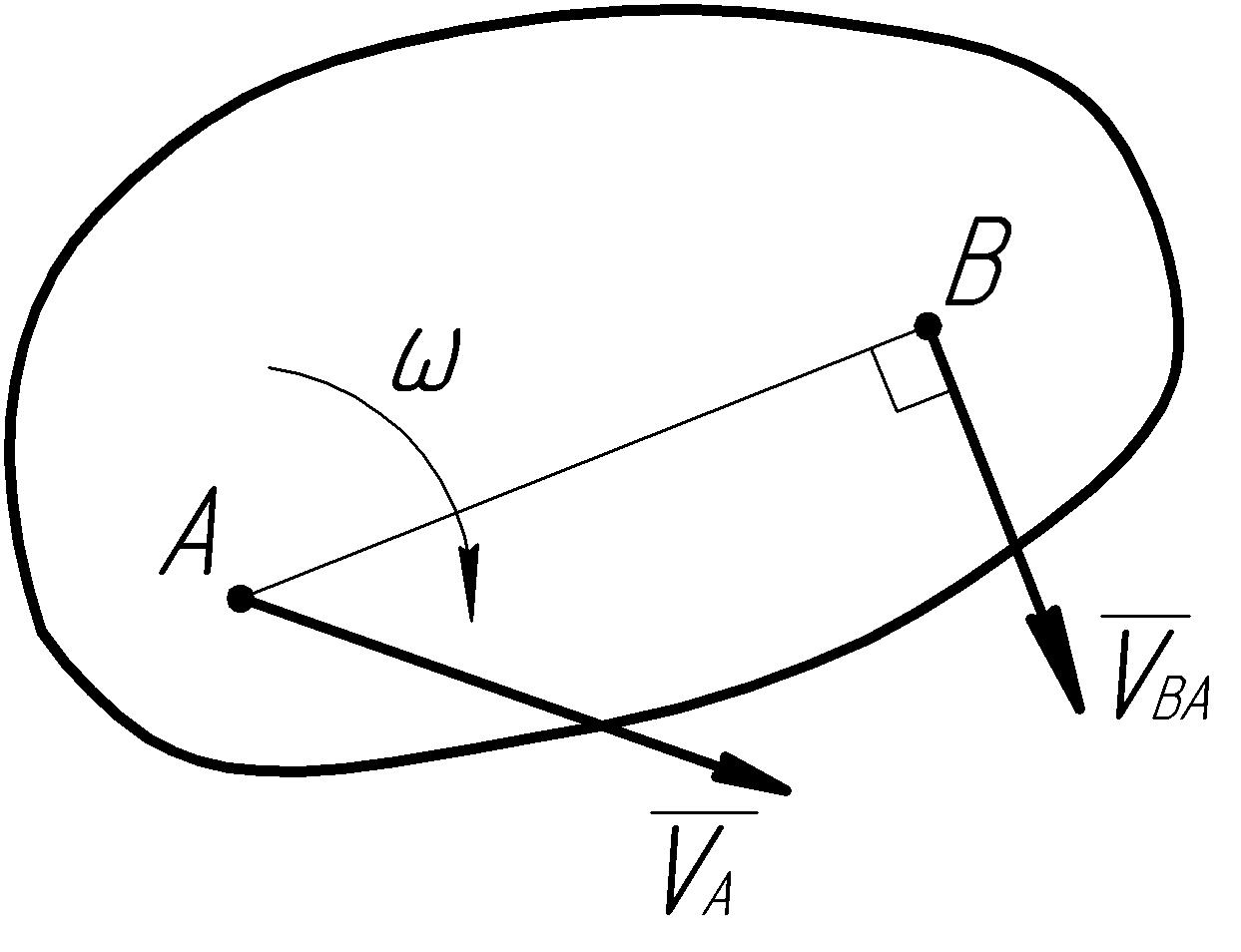
Рис. 3
Векторное уравнение (1) можно использовать для графического определения скоростей точек тела при плоском движении посредством построения плана скоростей.
Планом скоростей тела (механизма) называется векторная диаграмма, на которой изображены векторы скоростей различных точек тела (механизма).
Допустим, что требуется определить скорости точек B, C, D при следующих исходных условиях: известен вектор скорости точки А и направление вектора скорости точки B, который направлен вдоль прямой Bb (рис. 4).
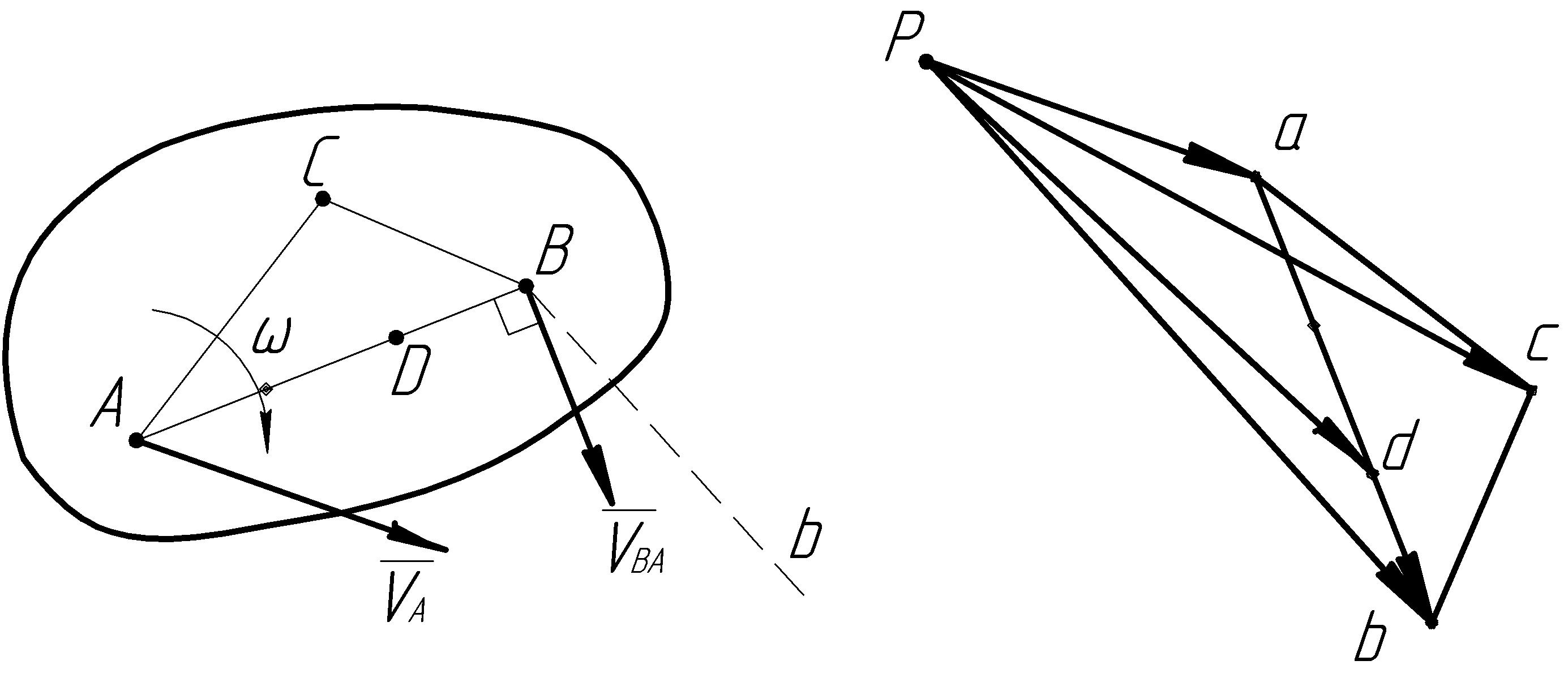
Рис.4.
Для определения скорости точки B воспользуемся векторным уравнением
![]() (2)
(2)
Для удобства анализа векторного уравнения введем следующие условия обозначения: вектор, который известен по величине и по направлению, будем подчеркивать двумя линиями, а вектор, известный только по направлению – одной. Если же вектор неизвестен как по направлению, так и по величине, то его не подчеркиваем.
Построение
плана скоростей осуществляется в
следующей последовательности. Из
произвольно выбранного полюса
![]() в выбранном масштабе отложим вектор
в выбранном масштабе отложим вектор
![]() ,
который изображает вектор скорости
точки A -
,
который изображает вектор скорости
точки A -
![]() .
.
Масштаб плана скоростей будет определять с помощью масштабного коэффициента
![]()
![]()
В
соответствии с уравнением (2), из конца
отрезка
– точки
![]() ,
проводим линию, перпендикулярную AB,
вдоль которой направляем вектор скорости
,
проводим линию, перпендикулярную AB,
вдоль которой направляем вектор скорости
![]() ,
а затем из полюса плана скоростей –
точки
проводим
линию, параллельную направлению скорости
точки В -
,
а затем из полюса плана скоростей –
точки
проводим
линию, параллельную направлению скорости
точки В -
![]() .
Точка пересечения этих линий определяет
точку
.
Точка пересечения этих линий определяет
точку
![]() ,
отрезок
,
отрезок
![]() определяет
скорость точки B, а отрезок
определяет
скорость точки B, а отрезок
![]() – скорость
– скорость
![]()
![]()
![]()
Угловая скорость тела
![]()
Направление
угловой скорости тела определяется по
направлению
![]() при вращении вокруг точки А.
при вращении вокруг точки А.
Скорость точки D определяем в соответствии с уравнением
![]() ,
,
где
![]()
Откуда
![]()
или
![]() .
.
Для определения скорости точки C составляем систему уравнений
![]()
![]() (3)
(3)
![]()
![]() (4)
(4)
В
соответствии с уравнением (3) из точки
плана скоростей проводим линию
перпендикулярную AC, а из точки
– линию перпендикулярную BC. Пересечение
этих линий определяет точку С, а отрезок
![]() – скорость
– скорость
![]() .
.
![]()
Из
построения видно, что
![]()
![]() ,
но повернут на
,
но повернут на
![]() по направлению угловой скорости тела.
по направлению угловой скорости тела.
Второй способ определения скоростей точек тела при плоском движении осуществляется с помощью мгновенного центра скоростей (МЦС).
Если известны направления скоростей двух точек тела A и B, то МЦС находится как точка пересечения перпендикуляров, проведенных из точек A и B к направлению скоростей соответствующих точек (рис. 5).
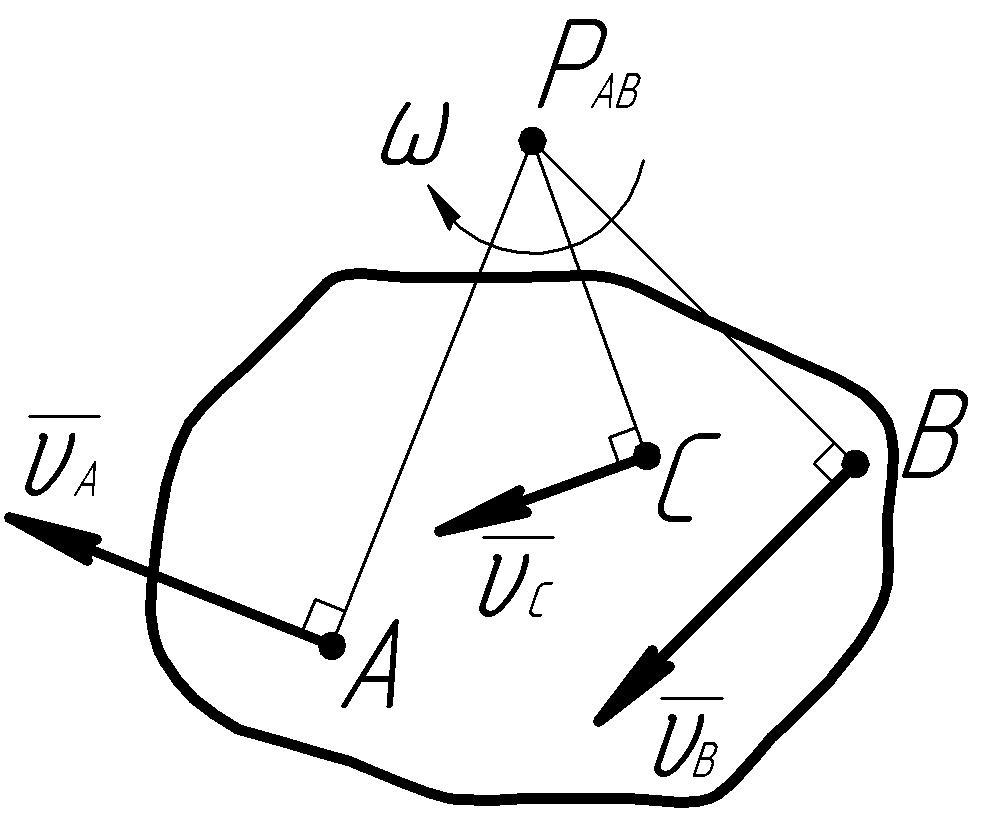
Рис.5.
При
качении тела без скольжения по неподвижной
кривой его МЦС находится в точке касания
тела с кривой. Определив положение
МЦС, находим скорости точек тела из
отношения
![]() ,
а угловую скорость тела по формуле
,
а угловую скорость тела по формуле
![]() .
.
Так как МЦС является мгновенным центром вращения тела, то направление угловой скорости определяется по направлению скорости точки вокруг МЦС.
Скорость произвольной точки C тела может быть также определена по формуле
![]()
![]()
и направлена в сторону вращения тела вокруг МЦС.
Ускорения точек тела при плоском движении определяются по теореме о распределении ускорений
![]() ,
(5)
,
(5)
где
![]()
![]() - нормальное ускорение точки В во
вращательном движении тела вокруг
полюса А,
- нормальное ускорение точки В во
вращательном движении тела вокруг
полюса А,
![]()
![]() - касательное
ускорение точки В во вращательном
движении тела вокруг полюса А (рис.6).
- касательное
ускорение точки В во вращательном
движении тела вокруг полюса А (рис.6).

Рис.6.
Построим
план ускорений в предположении, что нам
известны направление и величина ускорения
точки А -
![]() ,
угловая скорость тела -
,
угловая скорость тела -
![]() ,
и направление ускорения точки B.
,
и направление ускорения точки B.
Построение
плана ускорений ведем в следующей
последовательности. От произвольно
выбранного полюса плана ускорений точки
![]() откладываем в принятом масштабе ускорение
точки А в виде отрезка
откладываем в принятом масштабе ускорение
точки А в виде отрезка
![]() ,
,
а
от его конца ускорение
![]() ,
представляемое отрезком
,
представляемое отрезком
![]() .
.
При
этом
![]() .
.
Затем
из точки
![]() проводим линию, перпендикулярную АВ,
вдоль которой будет направлено ускорение
проводим линию, перпендикулярную АВ,
вдоль которой будет направлено ускорение
![]() ,
а из полюса
проводим линию, параллельную известному
направлению ускорения точки В (рис. 7).
,
а из полюса
проводим линию, параллельную известному
направлению ускорения точки В (рис. 7).
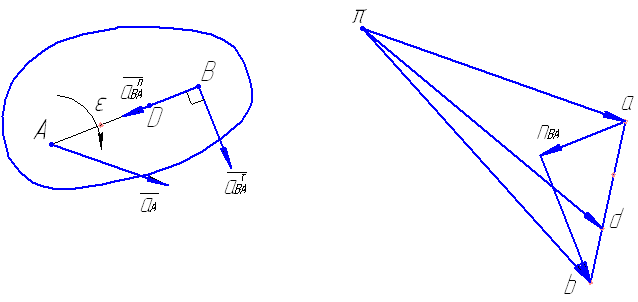
Рис.7.
Пересечение проведенных линий определяет точку , а отрезки
![]() и
и
![]() ,
в принятом масштабе, представляют,
соответственно, ускорения
,
в принятом масштабе, представляют,
соответственно, ускорения
![]() и
и
![]() ,
,
![]() .
.
Так
как
![]() ,
то угловое ускорение тела находим из
соотношения
,
то угловое ускорение тела находим из
соотношения
![]() .
.
Направление
углового ускорения тела определяется
по направлению
![]() вокруг полюса А.
вокруг полюса А.
Рассуждая аналогичным образом, как при построении плана скоростей, можно показать, что положение точки D, лежащей на отрезке АВ, можно определить из отношения
![]() ,
,
а
ускорение точки
![]() на плане ускорений, определяется вектором
на плане ускорений, определяется вектором
![]()
![]() .
.