

1). Рисуем расчетную схему.
Выдерживаем размеры и углы рис. 2,а
Выбираем объект изучения
Рассмотрим равновесие балки АВ
Расставляем действующие (заданные) силы
На
балку действуют: в точке С – вертикальная
сосредоточенная сила Р,
которую удобно заменить составляющими,
ее проекциями на координатные оси
![]()
![]() .
По всей длине балки действует равномерно
распределённая нагрузка, ее заменим
сосредоточенной силой
.
По всей длине балки действует равномерно
распределённая нагрузка, ее заменим
сосредоточенной силой
![]() ,
приложенной посередине. Правый конец
балки нагружен моментом М,
направленным против хода часовой
стрелки.
,
приложенной посередине. Правый конец
балки нагружен моментом М,
направленным против хода часовой
стрелки.
Заменяем действие связей реакциями:
Освободив балку от связи, заменим её действие реакциями связи XA, YA и реактивным моментом МА (рис. 2,б).
2) Введем систему координат и составляем уравнения равновесия
Составим уравнения равновесия в основной форме: суммы проекций сил на оси x и y и сумму моментов относительно точки А (1):
![]()
Полученные уравнения решаем относительно неизвестных XA, YA , МА:
![]()
![]()
Для проверки правильности решения составим сумму моментов, указанных сил относительно точки В:

ОТВЕТ: С точностью до сотых долей реакции
заделки равны
![]() Реакция RxA
направлена в сторону, противоположную
указанной на схеме.
Реакция RxA
направлена в сторону, противоположную
указанной на схеме.
Пример решения задачи из схемы С3
Двухопорная балка АВ (рис. 3,а) нагружена равномерно распределённой нагрузкой интенсивностью q=4 кН/м, сосредоточенной силой Р=10кН наклонной к балке под углом =60 и моментом М=20кН.м. Определить реакции опор.
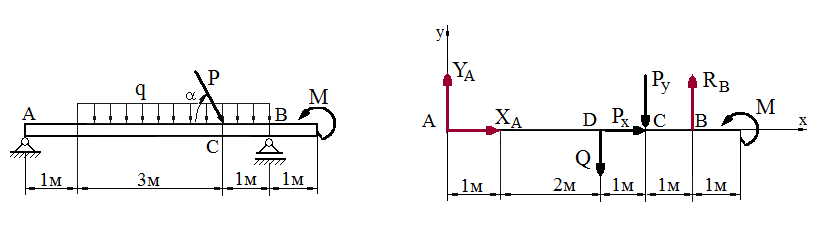
Рис.С3a) Рис.С3, в)
РЕШЕНИЕ
1). Рисуем расчетную схему.
Выдерживаем размеры и углы рис. С3,а
Выбираем объект изучения
Рассмотрим равновесие балки АВ
Расставляем действующие (заданные) силы
Равномерно
распределённую нагрузку q,
заменим сосредоточенной силой
![]() ,
приложенной посередине. Вместо силы P
введем ее проекции на координатные оси
,
приложенной посередине. Вместо силы P
введем ее проекции на координатные оси
![]()
![]() .
.
Заменяем действие связей реакциями
Заменим неподвижную опору в точке А реакциями XA, YA , а подвижную опору в точке В реакцией RB (рис. С3,б).
2) Введем систему координат и составляем уравнения равновесия
Выберем вторую форму уравнений равновесия, сумму проекций сил на оси x и суммы моментов относительно точек А и В (2):
![]()
Полученные уравнения решаем относительно неизвестных XA, YA , RB:
![]()
Для проверки правильности решения составим сумму проекций сил на ось у:
![]() .
.
Реакции опор найдены верно.
ОТВЕТ: Реакции неподвижной шарнирной опоры в точке А равны ХА=-5кН, УА=12,132кН, RВ=12,528кН Реакция ХA направлена в сторону, противоположную указанной на схеме.
Контрольные вопросы к защите задач
Что называется моментом силы? Что он характеризует и как определяется?
Что такое плечо?
В каком случае момент силы равен нулю? В каком случае момент силы будет положительным? Отрицательным?
Что такое пара сил? Чем она характеризуется? Чему равен момент пары сил?
Какие существуют формы уравнений равновесия произвольной плоской системы сил? Запишите их.
В чем состоит механический смысл уравнений равновесия?
Какая из систем уравнений равновесия является основной? Какие условия следует соблюдать при применении других систем уравнений?
Какая сила называется сосредоточенной?
Какая нагрузка называется распределенной? Чем она характеризуется?
Как определяется модуль и точка приложения результирующей распределенной нагрузки?
КИНЕМАТИКА
Задание К2. Определение скоростей и ускорений точек твердого тела при поступательном и вращательном движениях
Механизм состоит из ступенчатых колес 2-3, связанных ременной передачей, и груза 1, привязанного к концу нити, намотанной на одно из колес (рис. К2). Радиусы ступеней колес равны соответственно: у колеса 2 –r2, R2 см, у колеса 3 - r3, R3 . На ободах колес расположена точка М.
В таблице К2 указан закон движения или закон изменения угла поворота ведущего звена механизма, где s1(t)- закон движения груза 1, 2(t), 3(t) закон вращения колес 2 и 3 соответственно. Положительное направление для - против хода часовой стрелки, для s - вниз.
Определить в момент времени t1=1с угловые скорости и угловые ускорения колес, ускорение а тела 1 и ускорение а точки М, указанной на Рис.К2.
Таблица К2
-
№
s, см
2,рад
3,рад
r1,см
R1,см
r2,см
R2,см
1
20(t2+t)
10
15
8
16
2
10t2
15
30
12
24
3
40(t2+2t)
20
25
16
32
4
20t2
30
35
20
30
5
10(t3+6t2)
25
40
10
22
6
5t3
12
24
14
26
7
30(t2+6t)
24
36
18
32
8
30t3
18
36
22
30
9
6t2
16
32
16
32
10
20(t2+8t)
14
28
10
30
Указания к решению задания:
Задание К2 на исследование вращательного движения твердого тела вокруг неподвижной оси. При решении задачи учесть, что, когда два колеса связаны ременной передачей, то скорости всех точек ремня и, следовательно, точек, лежащих на ободе каждого из этих колес, в данный момент времени численно одинаковы; при этом считается, что ремень по ободу колеса не скользит.
(Условимся обозначать скорости точек, лежащих на внешних ободах колес (радиуса R), через v, а точек, лежащих на внутренних ободах (радиуса r),— через u).
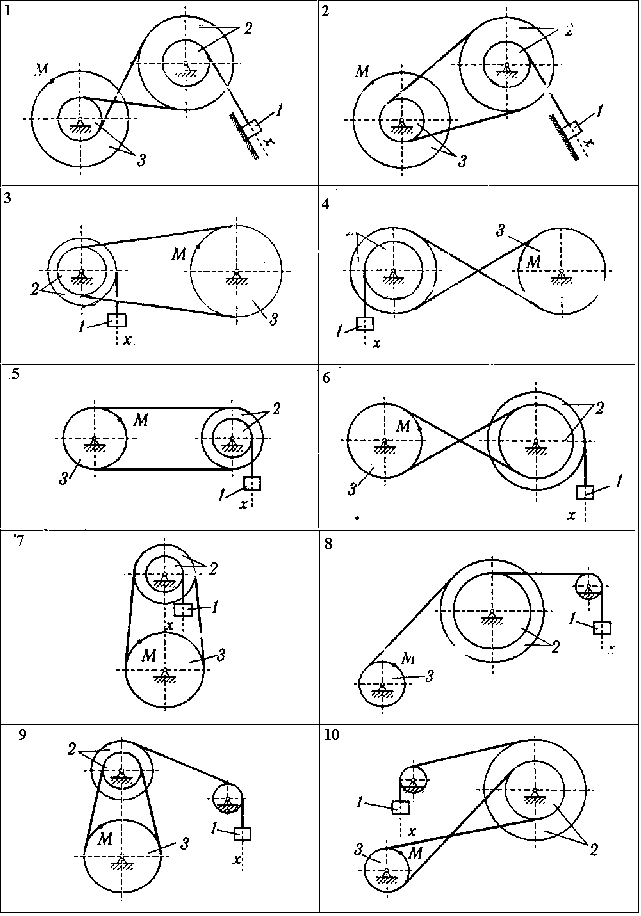
Рис.К2
Контрольные вопросы к защите задач:
Какое движение твердого тела называется поступательным?
Могут ли траектории точек тела при поступательном движении быть окружностями?
Какими уравнениями задается поступательное движение?
Какое движение твердого тела называется вращением вокруг оси? Каковы траектории точек при этом движении?
Каким уравнением задается вращение тела вокруг неподвижной оси?
Какие зависимости существуют между углом поворота, угловой скоростью и угловым ускорением тела?
Как определяется скорость точки тела, вращающегося вокруг неподвижной оси?
Как определяется ускорение точки тела, вращающегося вокруг неподвижной оси? Как направлены и чему равны его составляющие?
Во сколько раз ускорение точки А, вращающегося диска диска больше ускорения точки В, если расстояние точки А от оси вращения вдвое больше расстояния точки В.
Задание К-3. Плоско-параллельное движение. Определение скоростей
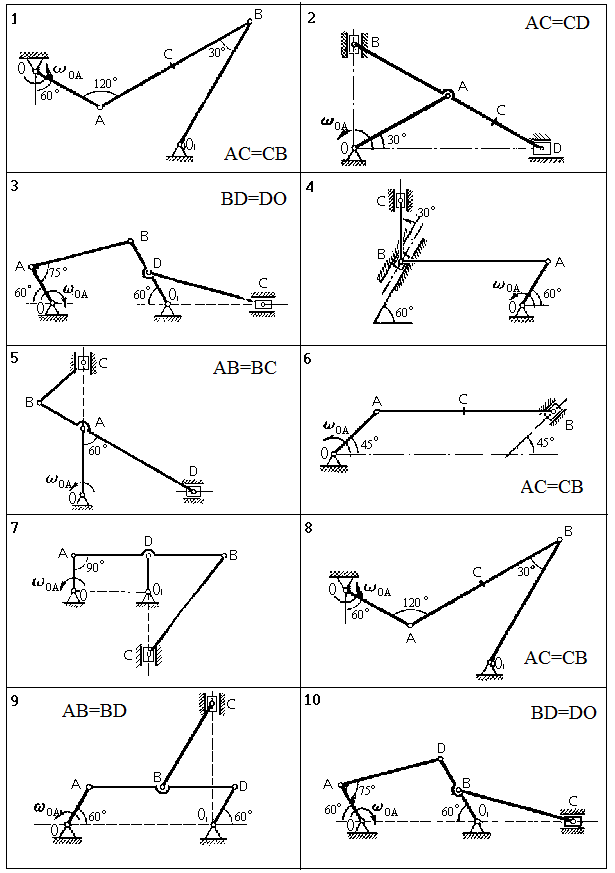
Для заданного положения механизма, зная угловую скорость кривошипа АО, найти скорости точек А, В, С и D и угловые скорости всех его звеньев, используя:
1. теорему о проекциях скоростей двух точек;
3. мгновенный центр скоростей.
Данные, необходимые для решения задачи, взять из таблицы К-3. Схемы приведены на Рис.К3.
Указания к решению задачи:
1. Построить чертеж в выбранном масштабе.
2. Указать на нем направления скоростей точек А и В.
3. Выбрать полюс, приняв за него точку, скорость которой можно вычислить.
Решение с помощью теоремы о проекциях скоростей двух точек:
Для определения скорости точки В
спроецировать слагаемые формулы
![]() на прямую AB. Для определения
скорости
на прямую AB. Для определения
скорости ![]() эту же формулу спроецировать на прямую,
перпендикулярную АВ. Вычислив значение
скорости
,
определить угловую скорость звена ВА
.
эту же формулу спроецировать на прямую,
перпендикулярную АВ. Вычислив значение
скорости
,
определить угловую скорость звена ВА
.
Решение с помощью мгновенного центра скоростей.
Определить
положение мгновенного центра скоростей,
построив перпендикуляры к скоростям
точек А и В. Определить скорость точки
В и угловую скорость звена АВ, используя
зависимости мгновенного центра
скоростей: ![]()
![]()
Таблица К 3
N условия |
размеры (см)
|
(с'1) |
|||
OA |
AB |
ВС |
BD |
||
1 |
35 |
45 |
20 |
20 |
1 |
2 |
20 |
35 |
25 |
15 |
4 |
3 |
10 |
20 |
15 |
10 |
3 |
4 |
10 |
20 |
10 |
12 |
2.5 |
5 |
10 |
25 |
10 |
15 |
5 |
6 |
15 |
30 |
20 |
20 |
2 |
7 |
30 |
55 |
25 |
30 |
1 |
8 |
25 |
50 |
25 |
25 |
1.5 |
9 |
20 |
45 |
20 |
20 |
3 |
10 |
10 |
30 |
15 |
15 |
2 |
Порядок решения задачи
Нарисовать чертеж в масштабе, расставить скорости точек А, В, С.
Определить угловые скорости звеньев и скорости точек механизма.
Вычислить ускорение шарнира А.
Определить ускорение точки В.
Пример решения задачи.
Шарнирно-стержневой механизм состоит из четырех шарнирно соединенных стержней и горизонтально движущегося ползуна С (рис. 3). Механизм приводится в движение кривошипом ОА, который вращается с постоянной угловой скоростью ОА =2рад/с.
В указанном положении механизма найти ускорения шарниров А, В, С и точки М. Даны размеры: АО = 2 см, АВ = 5 см, АМ=2см, BD=3см, ВС=2см, =30°, =30°.
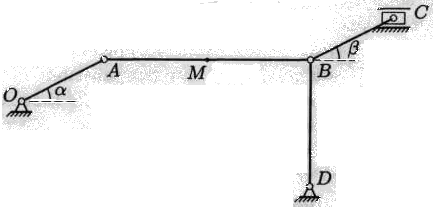
Рис.3.
Решение:
1. Определяем угловые скорости звеньев и скорости точек механизма. Находим величину скорости точки А:
![]()
Вектор vA направляем перпендикулярно радиусу АО против часовой стрелки. Вектор скорости vB направлен горизонтально. Мгновенный центр скоростей Р звена АВ находится на пересечении перпендикуляров к векторам скоростей точек А и В (рис. 4).
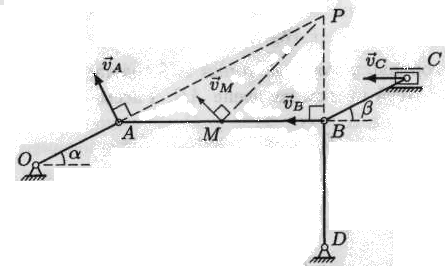
Рис.4
Находим расстояния точек А, В, М до МЦС.
Скорости точек находим из системы уравнений
В результате решения получим:
![]()
![]()
![]()
Найти
скорость точки С
не
составит труда. Векторы vB
и
vc
параллельны
и не перпендикулярны отрезку ВС.
Следовательно,
звено ВС
совершает
мгновенное поступательное движение, и
скорости всех его точек в этот момент
равны. Отсюда,
![]() Угловая скорость звена ВС
равна
нулю.
Угловая скорость звена ВС
равна
нулю.
2. Определяем ускорение шарнира А, принадлежащего звену О А с известной постоянной угловой скоростью ОА. Ускорение точки А состоит только из нормальной составляющей,
![]()
и направлено вдоль О А к центру О (рис. 5).
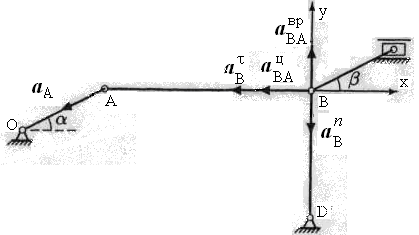
Рис.5
3. Находим ускорение точки В. Точка В движется по окружности с центром в шарнире D, и ее ускорение можно представить в виде векторной суммы нормального и касательного ускорений:
![]() . (1)
. (1)
С другой стороны, ускорение точки В выражается через ускорение точки А (полюса), лежащей на звене АВ, т.е.
![]() . (2)
. (2)
Сравнивая (1) и (2), получаем, что
![]() .
.
Проецируем равенство
на оси х и у и получаем систему двух
уравнений относительно неизвестных
![]()
![]() (3)
(3)
где
![]()
![]() .
.
Решаем систему (3)
![]()
Окончательно ускорение точки В равно
![]()
Результаты расчетов помещаем в таблицу (скорости в см/с, ускорения в см/с2):
vA |
vB |
vC |
aA |
aB |
4,000 |
2,000 |
2,000 |
8,000 |
9,423 |