

4. Электромеханические свойства асинхронных электродвигателей
4.1 Асинхронный электродвигатель с короткозамкнутым ротором
На горных предприятиях наиболее широко применяются асинхронные электродвигатели с короткозамкнутым ротором. Для привода мощных механизмов и передвижных машин применяют двигатели с фазным ротором.
Достоинства асинхронных электродвигателей (АД) – простота устройства, надежность, экономичность. Недостатки – сложность регулирования ω, квадратичная зависимость Мк от U (Мк – U2), плохие пусковые характеристики, небольшой пусковой момент при большем пусковом токе Iпуск.
Работа
АД основана на принципе взаимодействия
вращающего магнитного поля статора с
обмотками ротора. Скорость вращения
магнитного поля статора равна синхронной
и определяется уравнением:
 ,
рад/с или
,
рад/с или
 ,
об/мин,
,
об/мин,
где ƒ – частота питающей сети, ρ – число пар полюсов, – угловая скорость, n – частота вращения.
Вращающееся
магнитное поле, пересекая обмотки
статора и ротора, индуктируют в них ЭДС
– ЭДС ротора создает в проводах ротора
ток, который взаимодействует с полем
статора, вызывает электромагнитный
момент, действующий по направлению
вращения поля. Скорость вращения ротора
несколько меньше скорости вращения
поля статора. Отношение разности этих
скоростей к скорости
 называется скольжением S.
называется скольжением S.
 или
или
 .
.
S зависит от потерь в обмотках ротора. Чем больше нагрузка, тем больше S, так как растет ток обмоток ротора.
Вращающий
момент, развиваемый электродвигателем,
зависит от активной составляющей тока
ротора Iр.а.
и определяется из равенства:

При критической величине скольжения Sкр ток Iр.а. достигает максимума и при дальнейшем росте скольжения ток Iр.а. уменьшается, следовательно, уменьшается и вращающий момент Мg несмотря на рост тока Iр.а.
Зависимость
Мg
= ƒ(S)
определяется уравнением

 берется
из паспортных данных электродвигателя,
берется
из паспортных данных электродвигателя,
 определяется из уравнения
определяется из уравнения
 .
Здесь
.
Здесь
 - перегрузочная способность,
получена
из предыдущих уравнений при значении
- перегрузочная способность,
получена
из предыдущих уравнений при значении
 .
.
 Пример
1:
Пример
1:
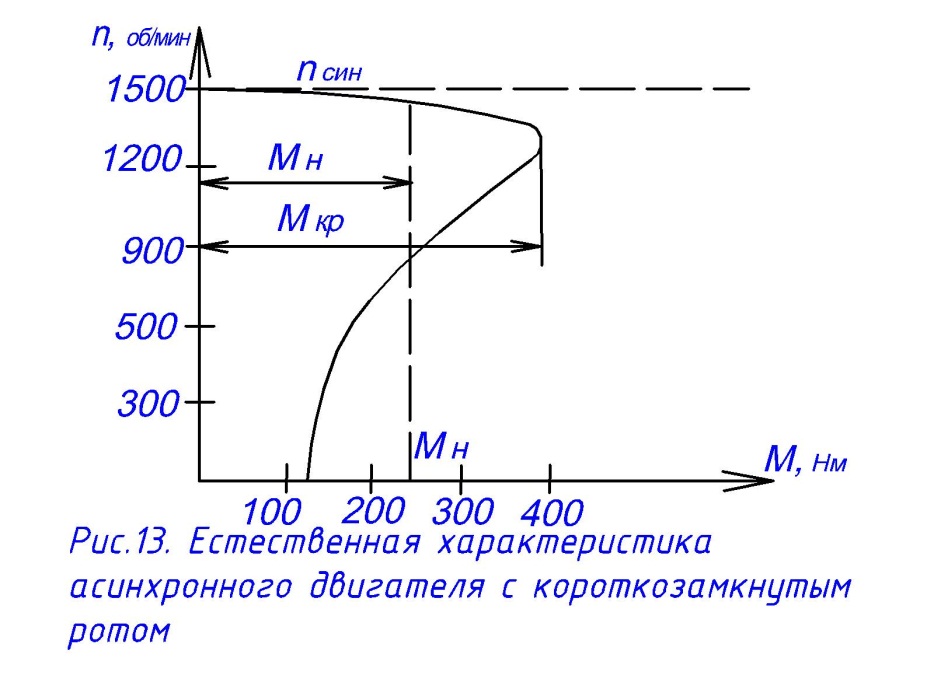
Построим естественную механическую характеристику для асинхронного двигателя с параметрами Pн = 30 кВт, Uн = 380В, nн =1460 об/мин, λ = 2,2.

 ;
;
 ;
;
 ;
;
Зададимся различными значениям S в уравнении
 и
сведем результаты вычисления М
и n
в таблицу 1, по расчетным данным построим
механическую характеристику, рис.13.
и
сведем результаты вычисления М
и n
в таблицу 1, по расчетным данным построим
механическую характеристику, рис.13.
Таблица 1
S |
0 |
0,0266 |
0,04 |
0,1 |
0,2 |
0,4 |
0,6 |
0,8 |
1,0 |
n |
1500 |
1460 |
1440 |
1350 |
1200 |
900 |
600 |
300 |
0 |
M |
0 |
200 |
324 |
410 |
328 |
209 |
138 |
100 |
82 |
Участок характеристики от S = 0 до S = является почти прямой линией со слабым наклоном. Это рабочая часть характеристики, имеющая жесткий характер. Участок характеристики S = до S = 1 имеет гиперболический характер и называется нерабочим, так как здесь электродвигатель работает только при пуске и торможении.
Жесткость механической характеристики объясняется тем, что она зависит прямо пропорционально от активного сопротивления ротора, которое делается небольшим для увеличения КПД и снижения потерь в роторе. Этим объясняется то, что при номинальном моменте скольжение уменьшается всего лишь на 4%.
Недостаток асинхронного электродвигателя с короткозамкнутым ротором – это малый пусковой момент Мпуск для общепромышленных АД при большом пусковом токе. Для увеличения Мпуск необходимо увеличить сопротивление ротора Rр, но это приведет к уменьшению КПД двигателя. Поэтому для мощных машин и механизмов применяют асинхронные двигатели с фазным ротором, которые допускают включение добавочного сопротивления в цепь роторных обмоток.