

Шпора по физике [1 семестр]4
.doc
|
27 1) Преобразования Галилея. В
Н
айдем взаимосвязь между координатами, измеренными в разных системах отсчета:
Пусть в начальный момент времени начала координат S и S` совпадают. Тогда через t координаты точки P которая движется вместе с системой S` будут (S`–x`, S – x). Из рис. видно что
С помощью этого преобразования координат, зная уравнения движения в одной системе, можно получить уравнение движения в другой инерциальной системе. Следствии:
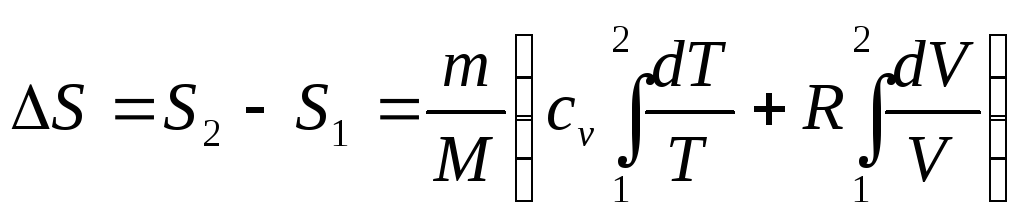
Уравнение динамики и все типы законов сохранения во всех системах отсчета имеют одинаковый вид. Поэтому говорят, что все законы механики инвариантны относительно преобразований Галилея. Инвариантность уравнений Ньютона относительно преобразований Галилея является математическим выражением классического принципа относительности. (Все инерционные системы равноправны) 2) Энтропия – является функцией состояния. Ее изменение связано с получением и отдачей теплоты. Элементарное изменение энтропии при заданной температуре определяется соотношением. Поскольку энтропия является функцией состояния Можно показать, что любой процесс приводит к возрастанию энтропии S>=0. Если термодинамическая система не является замкнутой т.е. имеется внешнее воздействие, то энтропия может и убывать. Найдем изменение энтропии в процессах связанных с идеальным газом.
При
При
При
Энтропия системы тел равна сумме энтропий каждого из них. Пример:
Найти
|
28 1) Масса – мера количества вещества. F=ma, F=G * m1 * m2 * / R*R Импульс тела – количество движения. P = m v (вектор) – справедливо для матерьяльной точки. Если тело имеет конечный размер, то импульс этого тела можно найти как векторную сумму импульсов матерьяльных точек, на которое можно разбить это тело. P – импульс. Сила – мера взаимодействия тел друг с другом. 4 вида взаимодействий: 1. Гравитационное – взаимодействие притяжения 2х тел, обладающих массой. 2. Слабые взаимодействия – ответственно за некоторые виды распада элементарных частиц, в частности за бета-распад. 3. Электро-магнитные взаимодействия – кулоновская и лоренцева силы. 4. Сильное взаимодействие – обеспечивает связь нуклонов в ядре. Закон всемирного тяготения: F=G m1 m2 / R * R; Fk = (1 / 4ПИ * Rнулевое) * (E1 E2 / R * R); Fл = kq[v,b (векторы)] Моментом импульса (моментом количества движения) матерьяльной точки относительно оси называется векторная величина L = r * P ; где все величины – векторы ; r – расстояние от оси вращения до этой точки. Импульс точки: P = mv. Моментом силы M называется величина M=r *F Моментом импульса твердого тела относительно оси является L = сумма ri Pi ; |L| = |r | |P| sinАЛЬФА ; Рассмотрим случай, когда АЛЬФА=ПИ/ 2: L = сумма mi vi ri = w сумма mi vi (ст.2) = J w; L = J w ; Продефференцируем это выражение по времени: dL / dt = J dw/dt = J центромасс = M ; dL / dt = M ; Если M= 0, то dL / dt = 0 L = const Это закон сохранения импульса!!! --- Если на систему тел не действует момент силы M или равнодействующая всех сил равна нулю, то момент импульса этой системы остается постоянным. Закон сохранения момента импульса является фундаментальным законом физики. Он справедлив не только в классической механике, но и в релитивистской и в квантовой механике. Закон сохранения момента импульса связан с изотропностью пространства – пространство обладает одинаковыми свойствами во всех направлениях.
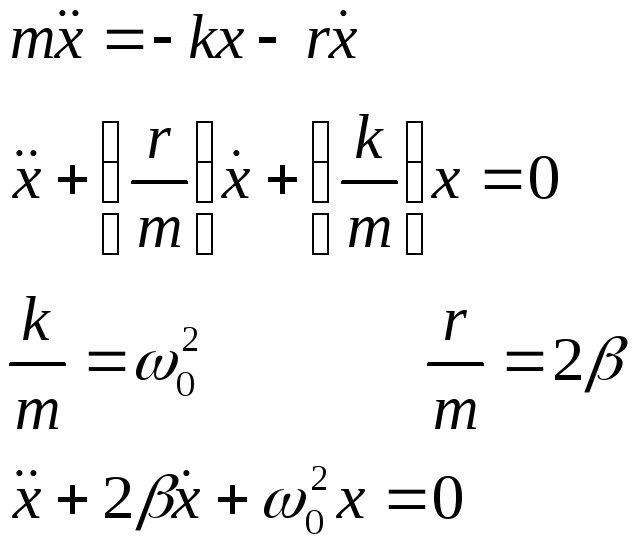
2) Затухающие колебания.
Колебания с течением времени затухают. Это связано с тем, что действуют силы сопротивления, которые при малых скоростях пропорциональны скорости.
Таким образом, 2-й закон Ньютона записывается в виде:
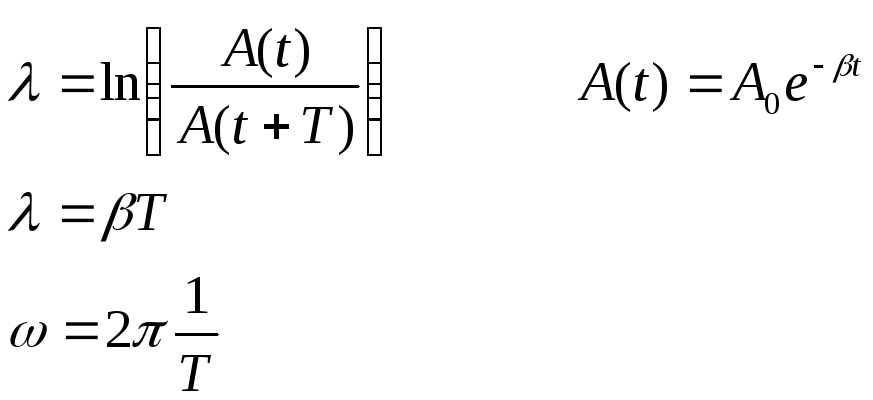
Полученное дифференциальное уравнение называется дифференциальным уравнением затухающих колебаний. Решением является функция:
– коэффициент затухания. При больших возможно, что =0: Апериодический процесс. В этом случае, энергия, полученная от отклонения, полностью расходуется на преодоление сил сопротивления. Характеризуется логарифмическим декрементом:
Уравнение, описывающее затухающие колебания: (d2 x / dt (ст2)) + b/m * dx/dt + kx / m = 0 ; Введем обозначения: w 0 (ст.2) = k/m ; b/m = 2БЕТА ; БЕТА = b/2m; b – коэффициент сопротивления ; (d2 x / dt (ст.2)) + 2БЕТА*dx/dt + w 0 (ст.2) x = 0 ; БЕТА – коэффициент затухания. Общее решение этого уравнения будем искать в виде X = A e (ст.ЛЯМДА t). Подставим это решение в дифференциальное уравнение затухающих колебаний: dx/dt = A ЛЯМДА e (ст. ЛЯМДА t) ; d2 x / dt (ст.2) = A ЛЯМДА (ст.2) e (ст. ЛЯМДА t); A ЛЯМДА (ст.2) e (ст. ЛЯМДА t) + 2bA ЛЯМДА e (ст.ЛЯМДА t) + w 0 (ст.2) A e (ст.ЛЯМДА t) ; Сокращаем: ЛЯМДА (ст.2) +2БЕТА d + w 0 (ст.2) = 0 – характеристическое уравнение. Решая его, получаем: X = - БЕТА + - (корень БЕТА (ст.2) – w 0 (ст.2)) = - БЕТА + - i (корень w 0 (ст.2) – БЕТА (ст.2)) ; Таким образом общее решение исходного дифференциального уравнения можно преобразовать к виду: w = (корень w 0 (ст.2) – БЕТА (ст.2)) ; X (t) = A0 e (ст. – БЕТА t) sin (wt + φ 0) ; (рисунок – график затухающих колебаний – сжатый синус, все ниже и неже стает по оси OY). Затухающие колебания не являются периодическими, т.к. максимальное значение колеблющихся величин, достигаемое в некоторый момент времени в последующем никогда не повторяется, поэтому можно говорить об условном периоде затухающих колебаний – T = 2ПИ / w = 2ПИ / (корень w 0 (ст.2) – БЕТА (ст.2)). Если БЕТА >= w 0, то процесс становится апериодическим. Логарифмический декремент затухания. δ = ln (A(t) / A(t + ПИ)) = ln (A0 e (ст. – БЕТА t) / A0 e (ст. – БЕТА (t + ПИ))) = ln (A0 e (ст. – БЕТА t) / A0 e (ст. – БЕТА t) e (ст. – БЕТА ПИ)) = БЕТА T ; δ = БЕТА T = 1 / N ; Время релаксации (ТАУ) в течении которого амплитуда затухающих колебаний убывает в e раз ; A = A0 / e = A0 e (ст. – БЕТА ТАУ) ; e (ст. - 1) = e (ст. – БЕТА ТАУ) – БЕТА ТАУ = 1 ; ТАУ = 1 / БЕТА ; N = ТАУ / T – число колебаний, в течении которых амплитуда убывает в e раз ; δ = 1 / N ; |
29 1) Средняя скорость движения: скалярная - отношение пути к промежутку времени, в течение которого материальная точка прошла этот путь Vср = L / Δt, векторная - отношение перемещения точки к промежутку времени, в течении которого точка совершила перемещение .
Мгновенная
скорость - величина, равная пределу
средней векторной скорости при
уменьшении промежутка времени
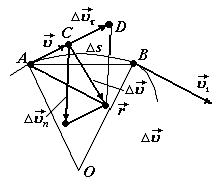
В случае неравномерного движения важно знать, как быстро изменяется скорость с течением времени. Физической величиной, характеризующей быстроту изменения скорости по модулю и направлению, является ускорение. Пусть
вектор
—
Средним ускорением
неравномерного движения в интервале
от t до t+Dt называется векторная величина,
равная отношению изменения скорости
Таким
образом, ускорение
Разложим
вектор
Предел
отношения Определим
вторую составляющую ускорения.
Допустим, что точка В достаточно близка
к точке А, поэтому Ds можно считать
дугой окружности некоторого радиуса
r, мало отличающейся от хорды АВ. Тогда
из подобия треугольников АОВ и EAD
следует
В
пределе при Dt ®0
Поскольку
Вторая
составляющая ускорения, равная
2) Идеальная тепловая машина Карно.
В ее основе лежит круговой процесс который называется циклом Карно 1-2: A1=Q1>0 – Изотерм. расширение 2-3: Q=0 – Адиабатическое расширение; 3-4: A2=Q2<0 – Изотермическое сжатие; 4-1: Q=0 Адиабатическое сжатие. Д
§14.6 Обратимые и необратимые процессы. Обратимыми называют ТД процессы в которых осуществляется переход из конечного состояния в начальное через те же промежуточные состояния, что и в прямом процессе. Можно доказать, что обратимыми являются только равновесные процессы. (В реальной жизни таких процессов нет) Вывод: любые реальные самопроизвольные процессы необратимы. Примеры: При соединении 2-х систем с разными температурами происходит теплопередача, в результате которой энергия передается от более нагретого тела к менее нагретому. Если эта система замкнута, то через некоторое время, температуры этих тел выровняются. Система переходит в состояние теплового равновесия, которое характеризуется вполне определённой температурой T. Такой процесс также является необратимым. Самопроизвольно одно тело не может принять температуру большую, а другое меньшую.
|
|
30 1)Потенциальная энергия. Работа, совершаемая потенциальными силами при изменениии конфигурации системы, т.е. расположении ее частей относительно системы отсчета не зависит от пути перехода из начального состояния в конечное. Эта работа A1-2 определяется только начальной и конечной конфигурацией систем, следовательно ее можно представить в виде разности значений некоторой функции конфигурации системы, называемой потенциальной энергией Wп. A1-2= Wп (1) – Wп (2) ; dA= - dWп. В каждой конкретной задаче для получения однозначной энергетической зависимости каждой потенциальной рассматриваемой системы от ее конфигурации, выбирают нулевую конфигурацию, в которой потенциальная энергия системы считается равной нулю. Потенциальной энергией механической системы называется величина, равная работе, которую совершают все действующие на систему потенциальные силы, при переводе системы из данного состояния в нулевое. dA= Fdr = Fx dx + Fy dy + Fz dz ; dA = - dWп ; dWп = дWп*dx / дх + дWп*dy / дy + дWп*dz / дz dA = Fdr = Fxdx + Fydy + Fzdz = - дWп*dx / дх - дWп*dy / дy - дWп*dz / дz F = i * Fx + j * Fy + k * Fz = - (i *дWп / дх + j *дWп / дy + k *дWп / дz) = = - gradWп Потенциальная энергия матерьяльной точки в однородном поле. Силовое поле однородно, если сила F одинакова во всех точках поля. Рассмотрим однородный случай! Пусть сила F, приложенная к матерьяльной точке действует вдоль оси Z ; dWп = - dA = Fz dz ; Wп = (интеграл z0 – z1) Fz dz = - Fz (z1 – z0) = -Fz * z ; Например тело в поле силы тяжести: F= mg ; z = h ; Wп = mgh Теорема о кинетической энергии.
Действие результирующей силы на тело и совершаемая при этом работа равна K (изменение кинетической энергии)
Закон сохранения механической энергии. Работа совершается каждый раз, когда энергия одного тела передается другому или преобразовывается из одного вида в другой. Согласно теореме о кинетической энергии, работа результирующих сил приводит к изменению кинетической энергии: А=K2+K1= K Все силы можно разделить на 3 группы: 1) Внешние 2) Неконсервативные 3) Консервативные Тогда АВН+AН.К+AК=K Учитывая, что работа консервативных сил может быть выражена через изменение потенциальной энергии, получаем соотношение: АВН+AН.К=K+U=E – полная энергия Таким образом видно, что если система тел замкнута (AВН =0) и отсутствуют неконсервативные силы (AН.К =0), то EПОЛН =const, K+U=const; K1 + U1 = K2 + U2 ; 2) Основное уравнение кинетической теории газов.
Идеальным газом называют газ, в котором отсутствуют взаимодействие между молекулами и размеры атомов пренебрежимо малы (материальные точки), атомы или молекулы совершают упругие соударения со стенками сосуда. При этих условиях молекулы идеального газа оказывают силовое воздействие на стенки сосуда, которое характеризуется физической величиной называемой давлением. P=F/S, Па. Давление – сила, действующая на единицу поверхности. Основное уравнение МКТ.
Поскольку молекулы движутся хаотически, то на каждую стенку давление будет оказываться в 6 раз меньше. 2. Средняя квадратичная скорость.
Воспользовавшись функцией распределения можно найти и среднюю скорость молекулы. По определению среднего:
Отсюда
и из
Сделав замену v2 = x и, проинтегрировав по частям, получим:
Средняя квадратичная скорость vср.кв. характеризует среднюю энергию поступательного движения молекулы. По определению:
Так как
Подставляя
F(v) из (3.4) и интегрируя, получим:
|
31 1)Кинематические характеристики вращательного движения.
Вращательное - движение, когда все точки тела движутся по концентрическим окружностям, центры которых лежат на одной прямой, которая называется осью вращения. ω - угловая скорость, характеризующая быстроту углового перемещен
[ω] = Рад/сек.
Скорость показывает простоту изменения тела в пространстве. Пусть моменту времени t1 соответствует радиус-вектор r1 движущейся точки, а близкому моменту времени t2 – радиус-вектор r2. Тогда за малый промежуток времени (delta) t точка совершит малое перемещение, равное (delta) s = (delta) r = r2 - r1. (рисунок – веторы r1, r2 выходят из нуля к точке 1, 2 на кривой; точки 1 и 2 соединены и образуют вектор deltaR; вектор средней скорости проходит через 1 и 2, а просто скорость выходит из точки по прямой). v (среднее) = < v > = (delta) s / (delta) t = (delta) r / (delta) t . Вектор средней скорости направлен вдоль вектора перемещения. Более полно описать движение позволяет мгновенная скорость, т.е. скорость в любой момент времени. Она равна lim (при delta t 0) delta r / delta t = r ‘ ( t ). Вектор мгновенной скорости направлен по касательной траектории данной точки. Модуль полной скорости равен: | v | = (корень) v (ст.2) по х + v (ст.2) по y + v (ст.2) по z Ускорение показывает скорость изменения скорости. a ( среднее ) = delta v / delta t. (рисунок – точка на полуокружности, от нее 2 вектора скорости, вверх и вправо, их соединяет delta v, вдоль нее уходит в некуда вектор среднего ускорения). Мгновенное ускорение – a = lim (delta t 0) delta v / delta t = dv / dt = v ‘ (t). Направление вектора ускорения составляет некоторый угол с вектором скорости. Угол АЛЬФА между векторами скорости и ускорения может изменяться в пределах 0 <= АЛЬФА <= ПИ. Углы АЛЬФА=0 и АЛЬФА=ПИ соответствуют прямолинейному движению. При 0 <= АЛЬФА <= ПИ/2 модуль скорости возрастает, при ПИ/2 < АЛЬФА <= ПИ модуль скорости убывает. При АЛЬФА = ПИ/2 модуль скорости не изменяется. Вектор ускорения АЛЬФА при криволинейном движении тела обычно представляют в виде суммы двух составляющих, направленных следующим образом: одна по касательной к траектории – это тангенсальное ускорение, вторая по нормали к касательной – нормальное ускорение.a (нормальное) = v (ст.2) / R //// a (тангенсальное) = dv / dt ///// | a | = (корень) a тангенсальное (ст.2) + a нормальное ст.2. 2) Закон распределения энергии по степеням свободы. На каждую степень свободы приходится в среднем одинаковая кинетическая энергия, равная 1/2kT. 1. Средняя энергия одной молекулы <e >=i(kT/2). Идеальный газ – это модель, которая во многих случаях с достаточно хорошей точностью описывает поведение газа. Идеальный газ – это газ, молекулы которого имеют пренибрежительно малый объем и не взаимодействуют на расстоянии. Молекулы идеального газа взаимодействуют друг с другом только в момент соударения. Причем соударение считается абсолютно упругим. Эти предположения (отсутствие взаимодействия, абсолютно упругие соударения) позволяют утверждать, что внутренняя энергия идеального газа определяется суммой кинетических энергий отдельных частиц, причем эта кинетическая энергия не переходит ни в какие другие виды энергии. Внутренняя энергия идеального газа состоит из учета потенциальной энергии и кинетической энергии движения атомов или молекул, поэтому величина внутренней энергии определяются выражением:
Внутренняя энергия – это функция состояние газа. Она прямо пропорциональна абсолютной температуре и характеризует энергию всех молекул газа. Внутренняя энергия одного моля газа. Um=<e >NA=(i/2)kNAT. 3. Внутренняя энергия произвольной массы газа. U=(m/M)UM=(m/M)(i/2)RT. Внутренняя энергия идеального газа. U=N<e >, <e > - средняя кинетическая энергия молекул. <e >=(i/2)(kT), где k=1,38× 10-23Дж/К, i - это сумма числа поступательных, вращательных и колебательных степеней свободы молекул. i=iпост.+ iвращ.+2iкол.. Реальные газы. Поведение реальных газов хорошо описывается уравнением pVM=RT только при слабых силах межмолекулярного взаимодействия. Реальный газ - это газ, между молекулами которого существуют заметные силы межмолекулярного взаимодействия. Для описания свойств реального газа используются уравнения, отличающиеся от уравнения Клаперона-Менделеева. Внутренняя энергия реального газа. U=n CvT-a'/V, где a'=n 2a. По этой формуле можно находить приближенное значение внутренней энергии реальных газов.
|
3 1) N = dA / dt – мгновенная мощность. Механическая работа и мощность. Механическая работа – выражение, определяемое соотношением: A=FScos = FS Формула может быть использована только тогда, когда F-const, a перемещение прямолинейно. Если перемещение не прямолинейно, а F-не const, то траекторию разбивают и считают что на S перемещение прямолинейно, а F-const
Примеры работы сил: 1) Работа сил упругости
2) Работа сил тяжести
dA=mgdh= mgdrcos=mgdh,
Работа
сил тяжести не зависит от траектории,
а определяется уровнем над поверхностью
земли. Силы, работа которых не зависит
от траектории, а определяется только
начальным и конечным положением наз.
консервативные силами (Сила тяжести,
Гравитационная, Электростатическая,
). Если F=const,
2 F(t)=F0cosωt
2-й закон Ньютона:
Они происходят с частотой ω вынуждающей силы.
При
На рисунке β2>β1 Явление резкого возрастания амплитуды вынужденных колебаний при совпадении частоты вынужденной силы с соответственной частотой колебаний системы называется резонансом. Амплитуда колебаний при резонансе зависит от затухания, чем оно больше, тем меньше амплитуда. При нулевом затуханиии амплитуда колебаний при резонансе достигает бесконечно большой величины При совпадении частоты внешней силы и частоты собственных колебаний тела амплитуда вынужденных колебаний резко возрастает. Такое явление называют механическим резонансом. Графически зависимость вынужденных колебаний от частоты действия внешней силы показана на рисунке 10. Явление резонанса может быть причиной разрушения машин, зданий, мостов, если собственные их частоты совпадают с частотой периодически действующей силы. Поэтому, например, двигатели в автомобилях устанавливают на специальных амортизаторах, а воинским подразделениям при движении по мосту запрещается идти «в ногу». При отсутствии трения амплитуда вынужденных колебаний при резонансе должна возрастать со временем неограниченно. В реальных системах амплитуда в установившемся режиме резонанса определяется условием потерь энергии в течение периода и работы внешней силы за то же время. Чем меньше трение, тем больше амплитуда при резонансе. 1. Мгновенная и средняя мощность.Мощность - физическая величина, характеризующая скорость выполнения работы. Мощность равна отношению совершенной работы ко времени, за которое она выполнена. Мгновенная мощность - предел, к которому стремится средняя мощность за бесконечно малый промежуток времени. Единицей мгновенной мощности являются: - ватт (Вт); или - лошадиная сила (лс). С В СИ средняя мощность измеряется в ваттах.
Для характеристики
скорости, с которой совершается работа,
введена величина, называемая мощностью.
Если за промежуток времени∆tсилаF,
приложенная к телу, совершает
элементарную работу ∆А, определяемую
выражением
Вспоминая
определение мгновенной скорости(∆t→0),
получим для мощности, развиваемой
силой F
в данный момент времени (мгновенная
мощность), следующее определение
где угол β - угол между направлением действия силы и скоростью материальной точки. 2. Резонанс. Резонансные кривые. Явление резкого возрастания амплитуды вынужденных колебаний при совпадении частоты вынужденной силы с соответственной частотой колебаний системы называется резонансом. Амплитуда колебаний при резонансе зависит от затухания, чем оно больше, тем меньше амплитуда. При нулевом затухании амплитуда колебаний при резонансе достигает бесконечно большой величины. вынужденные колебания. Амплитудно-частотные кривые-кривая,описывающая зависимость амплитуды вынужденных установившихся колебаний от частоты внешней силы. фазо-частотные кривые -то же для разности фаз вынужденных колебаний и внешней силы. резонанс: 0 А Ä+02A=0 2Á=(F0/m)sin0t A=(F0/2m0)sin(t-/2) A0=F0/2m0=(
F0/m02)*(0/2)=(F0/k)*Q (0-)/ 1 (02-2)2 = (0-)2*(0+)2; 0+ ≈ 2ω; 4γ2ω2 ≈ 4γ2ω02 – Формула Лоренца ∆ω = 2δ=ω0/Q - ширина резонансной кривой. — дектремент затухания. (ω02-2)1/2.
График зависимости A(ω) при различных β носят название резонансных кривых.
β
|
 се
законы классической механики одинаковы
во всех инерциальных системах отсчета.
Значит, все инерционные системы отсчета
равноправны и не возможно выявить
какую-то главную систему отсчета.
Отсюда следует, что если наблюдатель
находится в какой-либо инерциальной
системе отсчета, то с помощью
экспериментов он не может определить
движется он или нет. Всякое движение
в механике описывается в той или иной
системе отсчета по-разному.
се
законы классической механики одинаковы
во всех инерциальных системах отсчета.
Значит, все инерционные системы отсчета
равноправны и не возможно выявить
какую-то главную систему отсчета.
Отсюда следует, что если наблюдатель
находится в какой-либо инерциальной
системе отсчета, то с помощью
экспериментов он не может определить
движется он или нет. Всякое движение
в механике описывается в той или иной
системе отсчета по-разному.

 Преобразования
Галилея
Преобразования
Галилея


 ля
замкнутых циклов работа совершаемая
газом в цикле Карно равна подводимому
теплу. Тепловая машина реализующая
этот цикл имеет максимальный КПД по
сравнению с любым другим циклом.
=(T1-T2)/T1;
Для повышения КПД тепловых машин
Необходимо увеличивать температуру
нагревателя и уменьшать температуру
холодильника. КПД любой реальной
тепловой всегда меньше, чем у машины
Карно:
ля
замкнутых циклов работа совершаемая
газом в цикле Карно равна подводимому
теплу. Тепловая машина реализующая
этот цикл имеет максимальный КПД по
сравнению с любым другим циклом.
=(T1-T2)/T1;
Для повышения КПД тепловых машин
Необходимо увеличивать температуру
нагревателя и уменьшать температуру
холодильника. КПД любой реальной
тепловой всегда меньше, чем у машины
Карно:



 –
средняя скорость
–
средняя скорость
 2
2



 )
Вынужденные колебания
– это колебания, возникающие в
колебательной системе под влиянием
переменного внешнего воздействия.
)
Вынужденные колебания
– это колебания, возникающие в
колебательной системе под влиянием
переменного внешнего воздействия.
 редняя
мощность - физическая величина, равная
отношению работы к промежутку времени
за который эта работа совершена.
редняя
мощность - физическая величина, равная
отношению работы к промежутку времени
за который эта работа совершена.
 1
< β2
< β3,
2β23
> ω20,
в этом случае резонанса нет.
1
< β2
< β3,
2β23
> ω20,
в этом случае резонанса нет.