2.2. Роботтың қозғалтқыш жүйесі
Роботтың функционалдық мүмкіндіктері, оның жан-жақтылығы және қызмет көрсетіліп жатқан қондырғының сипаттамаларына сәйкестілігі бірінші кезекте механикалық қолдың мүмкін болатын қозғалыстардың әртүрлілігімен анықталады. Робот механикасының тиімді құрылысының негізгі міндеті берілген дәлдік, жүк көтерімділік және тезәрекеттік кезінде қажетті манипуляциялық мүмкіндіктері қамтамасыз етілуінен тұрады.
2.2.1. Робот қолының қаңқасы
Кинематикалық кескіннің құрылымын таңдауынан роботтың мүмкін болатын қозғалыстарының әртүрлігіне тәуелді. Алайда осы әртүрлілікті немен өлшейтіні және таңдау негізіне қандай ой-пікір тастауға болатыны айқын емес.
Кеңістікте объектпен еркін манипуляциялау үшін механизмнің алты еркіндік дәрежесі жеткілікті. Сондықтан қолдың қаңқасы (скелет руки), ереже бойынша, бір-бірімен топса арқылы дәйектілікпен (последовательно) жалғанған 6 буынды тізбектен құрылады. Негізден соңғы буын ұстап қалатын құрылғыны алып жүреді (несет захватное устройство) – жетінші еркіндік дәрежесі. Робот қозғалыстарын глобальды, аймақты және локальды деп бөледі. Глобальды қозғалыс – бұл робот өзінің өлшемдерінен асатын қашықтыққа орын ауыстырулар.Аймақты қозғалыстар – бұл робот ұстағышының (захват) қол қаңқасының буындарының өлшемдерімен анықталатын жұмыс кеңістігінің әртүрлі аймақтарына орын ауысуы. Локальды қозғалыстарға ұстағыш өлшемдерімен шамалас, оның орын ауыстыруын, жұмыс кеңістігінің аз аймағындағы бағдарын, кішкене орнатқыш (установочный) орын ауыстыруларды және т.б. жатқызады.
Локальды және аймақты қозғалыстар туралы түсінік робот қолының қаңқасын әртүрлі функционалды қызмет атқаратын екі кинематикалық аумаққа бөлшектеуге мүмкіндік береді: ұстағышпен қол буыны (кисть с захватом) және де қолдың өзіне. Қол буынының кинематикасы роботтың бағдаршы мүмкіндіктерін, ал қолдың кинематикасы роботтың жұмыс кеңістігінің өлшемі мен конфигурациясын анықтайды.
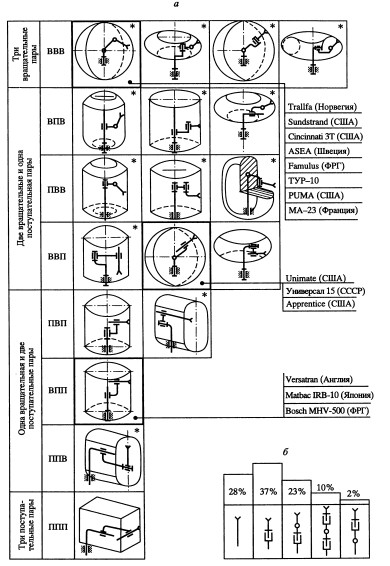
Қолдың мүмкін болатын құрылымдық кинематикалық кескіндері 2.2, а суретінде көрсетілген. Олар бесінші класстың (айналмалы В және ілгерлемелі П) үш жұбының үйлесіміменен жасалған және жіңішке сызықтармен көрсетілген жұмыс кеңістігінің шегіндегі ажыратылған (разомкнутый) тізбектің соңғы нүктесінің аймақты орын ауыстыруын қамтамасыз етеді.
Бесінші класстың үш (не одан да көп) кинематикалық жұбынан тұратын ажыратылған (разомкнутый) тізбектің әрбір құрылымы соңғы нүктенің көлемдің қозғалысын қамтамасыз етпейтініне көңіл бөлу керек. Механизмнің кинематикалық кескіні келесі шарттардың біреуін қанағаттандырса, онда осындай қозғалыс жүзеге асырылады:
осьтері параллель емес екі айналмалы жұбы бар болса;
осьтері параллель екі айналмалы жұп және айналмалы жұптардың осіне перпендикуляр емес осі бар ілгерлемелі жұп бар болса;
осьтері параллель емес екі ілгерлемелі жұп және ілгерлемелі жұптардың бағыттарымен қалыптасқан жазықтыққа осі перпендикуляр болатын айналмалы жұп немесе осі сол жазықтыққа параллель емес ілгерлемелі жұп бар болса;
Осьтері бір нүктеде қиылысатын айналмалы жұптары бар механизм ерекше (исключение) болып саналады. Келтірілген шарттардың орындалмауы көлемдік қозғалысты шығарады (исключает) және қозғалысты бетке әкеледі. Осындай құрылымдар робот қолының аймақты қозғалысын жүзеге асыру үшін қолдануға болмайды.
Келтірілген кескіндердің анализі мүмкін болатын нұсқалардың саны айналмалы жұптар санының кемуімен кемитінін көрсетті. Максималды нұсқалар саны (4) ВВВ және ВПВ кескіндерін береді. ППП кескіні тек бір нұсқада мүмкін.
Роботтың
бағдаршы қозғалыстары көбінесе қол
буынының құрылымымен (2.2, б сурет)
анықталады. Объектің еркін бағдарының
есебі осьтері 90 тізбектеп бұрылған (развернуть) үш
айналмалы жұбы бар кинематикалық
кескіндермен шешіледі. Осындай қол
буындар робот модельдерінің тек 10%
кездеседі, бұл негізгі технологиялық
қондырғы және оған қызмет көрсететін
роботтарды мамандырудың позициясымен
және осьтерінің шынайы орналасуымен
түсіндіріледі. Өнеркәсіптік роботтарды
мамандыру, бір жағынан, олардың құрылысын
жеңілдетеді (упрощает), ал екінші жағынан
– олардың мүмкіндіктерін шектеп отырады.
тізбектеп бұрылған (развернуть) үш
айналмалы жұбы бар кинематикалық
кескіндермен шешіледі. Осындай қол
буындар робот модельдерінің тек 10%
кездеседі, бұл негізгі технологиялық
қондырғы және оған қызмет көрсететін
роботтарды мамандырудың позициясымен
және осьтерінің шынайы орналасуымен
түсіндіріледі. Өнеркәсіптік роботтарды
мамандыру, бір жағынан, олардың құрылысын
жеңілдетеді (упрощает), ал екінші жағынан
– олардың мүмкіндіктерін шектеп отырады.