2.4. Роботтың ақпараттық жүйесі
Роботтарды бейімделу құрылғылармен жабдықтандыру қажеттілігі
әрбір нақты технологиялық құбылысты орындау үшін индивидуальды жасалынатын арнайы жабдықты (робот құнының 40% дейін) жою үшін және өнімнің жаңа түріне өндірістің қайта баптау мерзімін азайту талаптарымен ескерілген.
Жабдықты шығару (исключение) сыртқы ортаның қалпы және қасиеттері жөнінде ақпаратты түсіну жүйесімен және осы ақпаратты берілген әрекеттер программасын орындау барысында қолдану - роботты жабдықтаған кезінде ғана мүмкін. Робототехникадағы осындай жүйелер кең қолданыс тауып жатыр және болашақты әзірлемелерді (перспективные разроботки) орындау кезінде дәл оларға сүйеніп, бағдарланады.
Көп жағдайларда роботтың қабылдау жүйесінде айқын көрсетілген иерархиялық құрылымы бар болады: төменгі деңгейде (сезімдер деңгейінде) сыртқы ортаның қалпы жөніндегі қадағалар (датчик) орналасқан; орташа деңгейі ақпаратты бастапқы өңдеу және фильтрлеу құрылғыларынан тұрады; және жоғарғы деңгей (қабылдау деңгейі) логикалық және әрекет программасын жасау үшін қажетті ақпаратты алатын есептеуіш қондырғыларынан тұрады.
Технологиялық процесстің қазіргі күйі, робот ұстағышының, манипуляция объектілері және ортаның салыстырмалы орналасуы жөніндегі ақпарат көптеген «жіңішке» технологиялық операцияларды автоматтандыруға мүмкіндік береді, мысалы, имектеп дәнекерлеу (дуговая сварка), құрастырулар (сборка), қондырғыны дайындамалармен жүктеу, тетіктерді сұрыптау, оларды конвейерден іріктеу және т.б.
2.2.2. Жетектерді орналастырудың екі кескіні
Қосылудың негізінде екі әртүрлі кескіні мүмкін:тура буындарында орналасқан қозғалтқыштар; қозғалтқыштар негізінде (2.3, б сурет) орналасып, олар қосымша кинематикалық берілістер арқылы қаңқа буындарымен байланысады.
Бірінші
кескіннің құндылығы программалудың
ыңғайлылығы (көрнекілік) болып табылады,
яғни әр қозғалтқышпен дәйекті түрде
басқарып, тек бір топсада бұрыш өзгеруін
алуға мүмкіндік болады. Екінші жағдайда
қозғалыстар байланысқан және иін және
білек (предплечье) (координата
 )
өзгермейтін салыстырмалы орналасуы
кезіндегі иіннің орналасуын (
)
өзгермейтін салыстырмалы орналасуы
кезіндегі иіннің орналасуын ( координатасы) өзгерту үшін екі
қозғалтқышпен басқару керек. Дәл осыда
екінші кескінді программалудың қиындығы
жатыр, әсіресе шынайы құрылыстардағы
(конструкция) еркіндік дәрежелері 5-6
дейін жететінін ескерсек.
координатасы) өзгерту үшін екі
қозғалтқышпен басқару керек. Дәл осыда
екінші кескінді программалудың қиындығы
жатыр, әсіресе шынайы құрылыстардағы
(конструкция) еркіндік дәрежелері 5-6
дейін жететінін ескерсек.
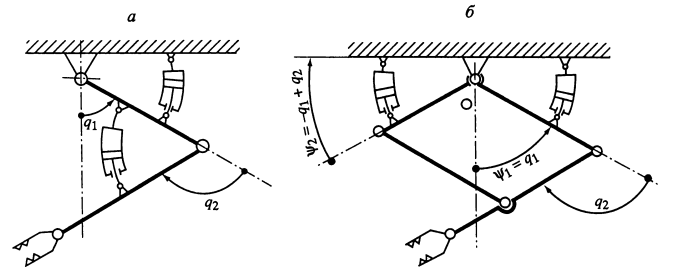 2.3
сурет.
Буындардағы (а) және негізіндегі (б)
жетектері бар механикалық қолдардың
модельдері
2.3
сурет.
Буындардағы (а) және негізіндегі (б)
жетектері бар механикалық қолдардың
модельдері
2.2.7. Өнеркәсіптік роботтар ұстағыштарының механизмдері
Роботтың манипуляция объектерімен әрекеттесуі ұстағыш құрылғы көмегімен жүзеге асады. Оның есептеу және құрастыруы кезінде бөлшектің немесе жұмыс құралының формасын, оның қасиеттерін (морттылығын, беттің тазалығын және т.б.), технологиялық құбылыстың жүру (көтерілген температура, отжарылысының қаупі, ортаның агрессиясы) және қолданалып жатқан технологиялық жабдықтың ерекшеліктерін ескереді. Осыдан келесі ұстағыштар конструкциясының көптүрлілігі түсінікті (2.5 сурет).
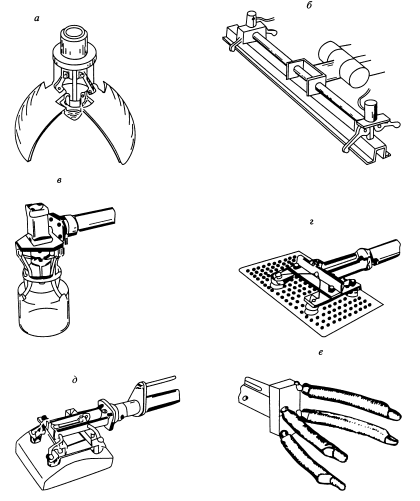
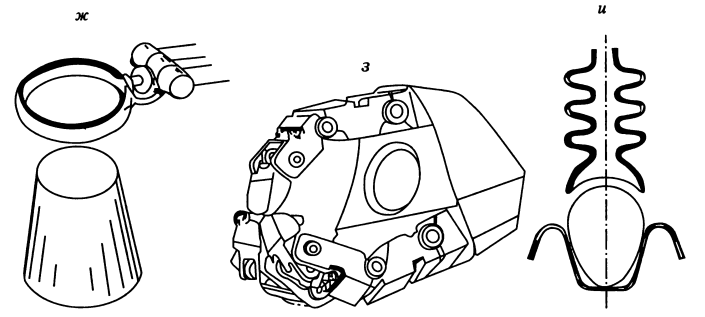
2.5 сурет. Типті ұстағыш құрылғыларының кескіндері.
а – сфералық формалы объектілер үшін үшсегментті ұстағыш; б - ұзынбойлық бөлшектер үшін ұстағыш; в – арнайы бөлшектерге арналған ішкі ұстағыш; г – электромагнитті ұстағыш; д – вакуумды сорғышы бар (присоска) ұстағыш; е – пневматикалық саусақты ұстағыш; ж – қысымнан диматетрін өзгертуге болатын сақиналы ұстағыш; з – саусақтарға жетектері және сенсорлық құрылығылары бар үшсаусақты ұстағыш; и – арнайы вакуумды ұстағыш.
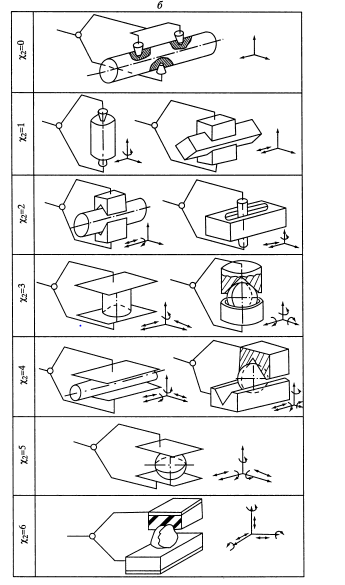
2.7 сурет. (а) жабдықтағы күрделі форманың бөлшектерін бекіту және әртүрлі конфигурациядағы (б) ұстағыштың бөлшектерді ұстап қалу нұсқалары