

2.3. Роботты басқару жүйесі
Басқарылатын объекттер ретіндегі робототехникалық құрылғылардың өзіндік ерекшеліктері бірінші кезекте өмірге келтірілетін траекторийлер түрлерінің сан алуандығымен және де дәстүрлі технологиялық қондырғыға қарағанда жылдамдықтар өзгеруінің өте кең диапозонымен ескеріледі.
Берілген алуан түрліліктен нақты траекторийлер мен режімдерді таңдау міндеті, яғни қозғалыс программасының синтезі, адам-оператордың көмегімен жүйемен немесе автоматты түрде сәйкес келетін басқару программаларының және орта жөніндегі ақпаратты жинау және өңдеу техникалық құралдары бар болса, шешілу керек.
3.1. Қол қаңқасының жалпыланған координаталары. Кеңістік механизмдер буындарының орналасуын анықтауға арналған матрицалық түрлендірулер
Механизмнің орналасуын, жылдамдықтар және т.б. туралы есепті шешу үшін қажетті мезанизм сипаттауын ресімдеу үшін берілген буынның барлық нүктелері сонымен қатар алдыңғы және келесі кинематикалық жұптар осьтерінің орналасуы анықталған болса, онда қол қаңқасының әрбір буынын оң координат жүйесімен байланыстырамыз. Егер i кинематикалық жұбының жылжу шамасымен берілсек, онда бір координат жүйесінің алдыңғыға салыстырмалы түрдегі орналасуы толығымен анықталады.
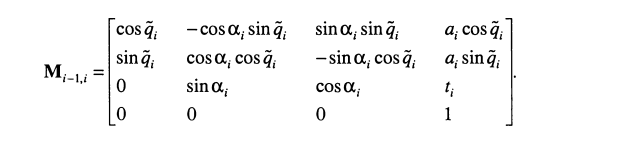
(i-1) координат жүйесіндегі i буынының нүкте координаттарын есептеу үшін үшөлшемді кеңістік нүктетелерінің біртекті координаттары деп аталатын түрлендіргіш [4x4] өлшемді матрицасын қолданамыз. Бұл матрицалар төменгі кинематикалық жұптары бар кеңістік механизмдер және де өнеркәсіптік роботтарды зерттеу кезінде өте ыңғайлы болып шықты, өйткені тек қана координат осьтерін айналғандағы бұрылысын емес, сонымен қатар координат басының жылжуын сипаттауға мүмкіндік береді, ал осындай матрицаларды көпретті түрлендіргенде олардың тек көбейтуіне әкеледі. Біртекті координаттардың жеке жағдайларында (бір координат жүйесінен басқа координат жүйесіне көшкен кезде өзгермегенде) қарапайым және физикалық түсінікті i жүйесінен (i-1) жүйесіне көшкенін анықтайтын матрицалық байланыс (соотношение) орын алады:
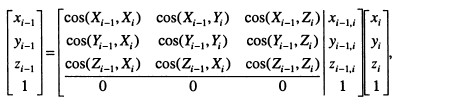
мұндағы
 -j
жүйесіндегі нүкте координатасының
вектор-бағаны;
-j
жүйесіндегі нүкте координатасының
вектор-бағаны;
 -(i-1)
координат
жүйесіндегі i
жүйесінің бас координатасының
вектор-бағаны; бағыттауыш косинустармен
қалыптасқан [3x3] өлшемді
-(i-1)
координат
жүйесіндегі i
жүйесінің бас координатасының
вектор-бағаны; бағыттауыш косинустармен
қалыптасқан [3x3] өлшемді
 матрицасы(i-1)
жүйесіне
салыстырмалы i
жүйесінің бұрылысын анықтайды. Осы
матрицалық түрлендіру қысқаша түрде
былай беріледі:
матрицасы(i-1)
жүйесіне
салыстырмалы i
жүйесінің бұрылысын анықтайды. Осы
матрицалық түрлендіру қысқаша түрде
былай беріледі:
![]()
(i-1) жүйесінен i жүйесіне кері көшу ұқсас матрицалық байланыспен анықталады:
![]()
Топсалы-жалғанған
буындар тізбегі бойынша дәйекті түрдегі
көшу кезінде, мысалы, n-нді
координат жүйесінен (n-нді
буыннан) нөлдікке (негізбен байланысқан),
көшу формуласы келесі матрица
көбейтіндісіне келеді:
![]()
 матрицадағы
матрицадағы
 матрицасының тұжырымының дұрыстығын
тексеру үшін келесі ережелермен
пайдаланылған ыңғайлы:
матрицасының тұжырымының дұрыстығын
тексеру үшін келесі ережелермен
пайдаланылған ыңғайлы:
а) бір және сол жолдағы немесе бір және сол баған құрамындағы элементтер квадратының қосындысы 1-ге тең;
ә) екі жол немесе екі бағандардың сәйкес элементтерінің көбейтінділер қосындысы 0-ге тең.
Кеңістіктегі
екі ілгерлемелі кинематикалық жұп
осьтерінің орналасуының жалпы жағдайын
қарастырайық. Екі көрші кинематикалық
жұптардың осьтері арқылы екі ось
арасындағы бір-бірінен ең қысқа қашықтық
шамасына алшақтанған
 және
және екі параллель жазықтық жүргізейік (3.1
сурет).
i
координат жүйесінің центрін
екі параллель жазықтық жүргізейік (3.1
сурет).
i
координат жүйесінің центрін
 жазықтығында ең қысқа қашықтық
жазықтығында ең қысқа қашықтық түзуі
мен(i+1)
кинематикалық жұп осінің қиылысу
нүктесінде орналастырамыз.
түзуі
мен(i+1)
кинематикалық жұп осінің қиылысу
нүктесінде орналастырамыз.
 осі ең қысқа қашықтық түзуімен сәйкес
келеді жәнеi-ден
(i+1)
жұбына бағытталған.
осі ең қысқа қашықтық түзуімен сәйкес
келеді жәнеi-ден
(i+1)
жұбына бағытталған.
 осі (i+1)
кинематикалық жұп осімен сәйкес келеді
және
осі (i+1)
кинематикалық жұп осімен сәйкес келеді
және
 осінен қарағанда жұп осьтерінің
осінен қарағанда жұп осьтерінің қиылысу
бұрышына келген
қиылысу
бұрышына келген осіне
салыстырмалы
осіне
салыстырмалы осінің бұрылысы оң бағытта (сағат тіліне
қарама-қарсы) жүзеге асырылатындай
бағытталу керек. Оң координат жүйесінен
осінің бұрылысы оң бағытта (сағат тіліне
қарама-қарсы) жүзеге асырылатындай
бағытталу керек. Оң координат жүйесінен ос бағыты таңдалынады.
ос бағыты таңдалынады.
Осындай
құрылыс кезінде (i+1)
координат
жүйесінің басы
 мен
мен осьтерінің қиылысу нүктелерінің
арасындағы қашықтық жалпы жағдайда
кейбір
осьтерінің қиылысу нүктелерінің
арасындағы қашықтық жалпы жағдайда
кейбір шамасына
тең болады.i
буынының орналасуы тағы
шамасына
тең болады.i
буынының орналасуы тағы
 осі
осі осін айналғандағы
осін айналғандағы бұрышымен анықталады.
бұрышымен анықталады.
Абсолютті
(i=0)
оң
координат жүйесін
 осін бірінші кинематикалық жұп осі
бойымен бағыттап, негізбен байланыстырайық.
Сонымен қатар
осін бірінші кинематикалық жұп осі
бойымен бағыттап, негізбен байланыстырайық.
Сонымен қатар осі ұстағыш еріндерінің жазықтығына
параллель, ал
осі ұстағыш еріндерінің жазықтығына
параллель, ал осі оларға перпендикуляр болатындай,
атқарушы ұстағыш – мүшемен байланысқан
n-нді координат жүйесінің орналасуын
айқындайық.n-нді
координат жүйесінің полюсі ұстағыш
еріндерінің арасындағы центрде
орналасқан.
осі оларға перпендикуляр болатындай,
атқарушы ұстағыш – мүшемен байланысқан
n-нді координат жүйесінің орналасуын
айқындайық.n-нді
координат жүйесінің полюсі ұстағыш
еріндерінің арасындағы центрде
орналасқан.
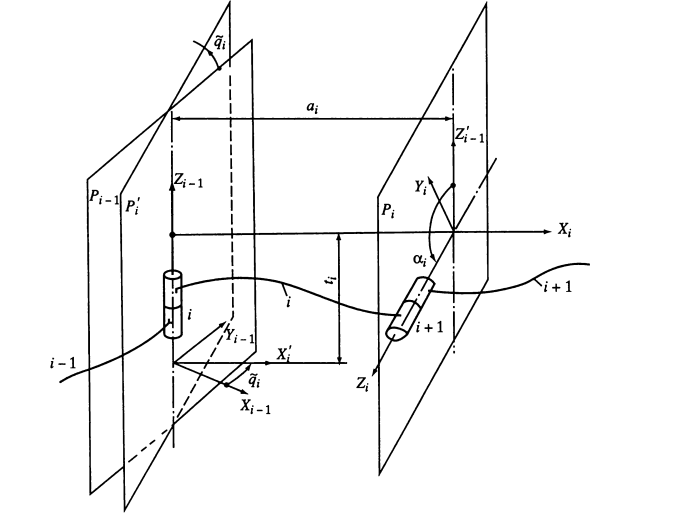
3.1 сурет. Роботтың топсаларына және буындарына координат жүйелерін «байлау» (привязка) кескіні
Осындай
жолмен,
i-1
буынына ((i-1)
координат жүйесінің) салыстырмалы
i
буынының (i координат жүйесінің) орналасуы
төрт параметрмен анықталады:
 ,
, ,
, ,
, .
Айналмалы кинематикалық жұп кезінде
жалпыланған координата
.
Айналмалы кинематикалық жұп кезінде
жалпыланған координата болады; ілгерлемелі жағдайында -
болады; ілгерлемелі жағдайында - =
= .
. және
және параметрлері тұрақты болып саналады
және қол қаңқасының буынының ұзындығын
және жұптардың екі көрші осьтерінің
қиылысу бұрышын анықтайды. Координат
жүйелерін тағайындаудың сипатталған
әдісі кезінде әрқашанда
параметрлері тұрақты болып саналады
және қол қаңқасының буынының ұзындығын
және жұптардың екі көрші осьтерінің
қиылысу бұрышын анықтайды. Координат
жүйелерін тағайындаудың сипатталған
әдісі кезінде әрқашанда ,
ал
,
ал белгісі
белгісі осі бағыты бойынша(i-1)
жүйесінде анықталады.
осі бағыты бойынша(i-1)
жүйесінде анықталады.
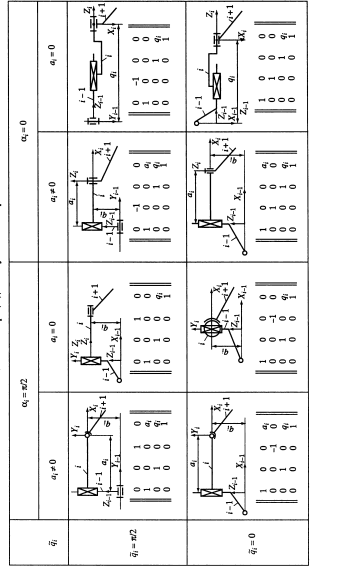
Өнеркәсіптік
роботтарда сыбайлас кинематикалық
жұптардың осьтері, ереже бойынша, не
параллель, не перпендикуляр. Одан басқа
конструкцияны және басқару алгоритмдерін
қарапайымдылауға ұмтылу
 =0
немесе
=0
немесе =0
кескін нұсқаларына жиі әкеледі. Осы
тәжірибеге маңызды кескіндер мен
айналмалы жұптар үшін матрица
түрлендірулерінің жеке жағдайлары -
3.1 кестесінде, ал ілгерлемелі жұп үшін
– 3.2 кестесінде көрсетілген.
=0
кескін нұсқаларына жиі әкеледі. Осы
тәжірибеге маңызды кескіндер мен
айналмалы жұптар үшін матрица
түрлендірулерінің жеке жағдайлары -
3.1 кестесінде, ал ілгерлемелі жұп үшін
– 3.2 кестесінде көрсетілген.
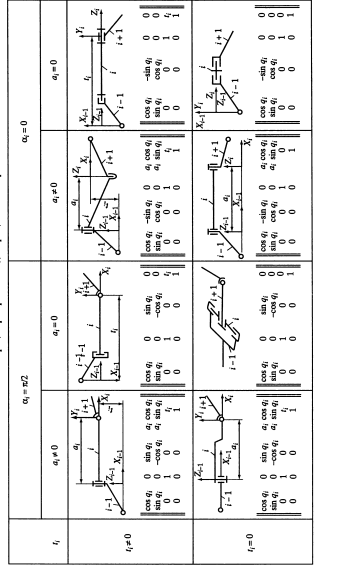
3.1 сурет. Айналмалы жұп үшін кескіндер мен матрица түрлендірулері
3.2 сурет. Ілгерлемелі жұп үшін кескіндер мен матрица түрлендірулері
Жоспар
Тарихқа шолу. Манипуляторлар
Өнеркәсіптік роботтың құрылымы және оның басты элементтері
1. Роботтың жалпыланған құрылымдық кескіні (схемасы)
2. Роботтың қозғалтқыш жүйесі
2.1. Робот қолының қаңқасы
2.2. Роботтың ақпараттық жүйесі
2.3. Роботты басқару жүйесі
4. Жетектерді орналастырудың екі кескіні
5. Өнеркәсіптік роботтар ұстағыштарының механизмдері
6. Қол қаңқасының жалпыланған координаталары. Кеңістік
механизмдер буындарының орналасуын анықтауға
арналған матрицалық түрлендірулер