

9. Плавность хода
9.1. Плавность хода и ее значение
Под плавностью хода понимают способность автомобиля двигаться в различных условиях с возможно малыми колебаниями кузова или грузовой платформы, не утомляя пассажиров и водителя, способствуя сохранности грузов.
Возникающие в процессе движения автомобиля колебания (вибрации) тела человека оказывают сложное биологическое воздействие на его состояние, т.к. могут вызвать ряд изменений в организме, влияющих на функциональное состояние и уровень работоспособности. При этом действие вибрации на организм зависит от ее частоты, амплитуды, направления и продолжительности.
Колебания с частотой до 3-5 Гц оказывают влияние на вестибулярный аппарат человека и могут вызвать "морскую" болезнь, т.е. укачивание.
Колебания с частотами от 3-5 до 11 Гц вызывают расстройства, обусловленные возбуждением лабиринтного аппарата внутреннего уха и резонансными колебаниями как человеческого тела в целом, так и некоторых его частей (головы, желудка, печени и кишечника).
Колебания с частотами 11 - 45 Гц могут вызывать расстройства ряда внутренних органов, ухудшение зрения и даже тошноту и рвоту.
Вибрации тела с частотой свыше 45 Гц вызывают так называемую вибрационную болезнь.
При взаимодействии колес с неровностями дороги кузов и колеса совершают сложные колебания, которые оказывают значительное влияние не только на пассажиров и груз, но и на рабочие процессы в различных агрегатах и механизмах самого автомобиля, что в конечном счете отражается на его эксплуатационных показателях. Установлено, что при эксплуатации автомобилей на неровных дорогах снижается средняя скорость движения, уменьшается срок службы автомобиля и его производительность, возрастает расход топлива и износ шин; увеличиваются затраты на техническое обслуживание и ремонт. Поэтому плавность хода рассматривается как одно из важнейших эксплуатационных свойств автомобиля.
Улучшение плавности хода достигается оптимизацией ряда конструктивных параметров самого автомобиля и его подвески, а также за счет подрессоривания кабины и сидения водителей и пассажиров.
9.2. Измерители плавности хода
Плавность хода оценивается с помощью нескольких измерителей:
Период колебаний Т – время, в течении которого кузов совершает полное колебательное движение.
Угловая (циклическая) частота колебаний:
= 2/Т. (191)
В практике частоту колебаний измеряют числом колебаний в минуту:
n
= 60/Т = 60/2
= 30/![]() ,
(192)
,
(192)
где m – масса колеблющегося тела.
Амплитуда колебаний Аmax – наибольшее отклонение (перемещение) кузова от положения равновесия
Скорость колебаний Vк – это первая производная перемещения по времени.
Ускорение колебаний - вторая производная перемещения по времени или первая производная скорости колебаний по времени, м/с2.
Скорость нарастания ускорений колебаний – третья производная перемещения по времени или первая производная ускорения колебаний по времени, м/с3.
9.3. Колебания автомобиля
Кузов автомобиля имеет шесть степеней свободы и совершает весьма различные колебания (рис. 50.). Линейные перемещения вдоль осей х и у: Sх – подергивание, Sу – шатание, Sz – подпрыгивание, и угловые перемещения вокруг этих осей х – покачивание, у – галопирование, z – виляние.
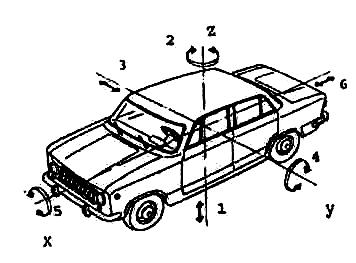
Рис. 50. Основные виды колебаний
Приведенная жесткость подвески (сп) складывается из жесткости упругих элементов самой подвески (cр) и жесткости пневматических шин (cш) (рис. 51.).
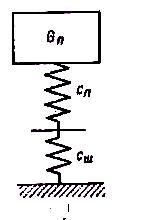
Рис. 51. Определение приведенной жесткости подвески
Под влиянием веса Gп упругая система деформируется на величину, равную сумме прогибов подвески и шины. Вместе с тем суммарный прогиб этой системы, который определяют по изменению положения оси колеса:
f = Gп/спр, (193)
где спр – приведенная жесткость подвески и шины, Н/м.
Тогда
![]() .
(194)
.
(194)
Решив полученное равенство получим:
спр
=
![]() .
(195)
.
(195)
Жесткость передней или задней подвески современных автомобилей находится в пределах 20 - 60 кН/м, а жесткость шин – в пределах 200 - 450 кН/м.
Для уменьшения вертикальных колебаний используют мягкую подвеску и устанавливают амортизаторы. Чтобы иметь представление о том, каким образом уменьшить галопирование, познакомимся с понятием о центре упругости системы /3/. Центром упругости системы называют точку, при приложении к которой внешней возмущающей силы возникает только линейное перемещение системы. Рассмотрим стержень, который опирается на упругие элементы подвески (рис. 52).
Если сила Р приложена не к центру упругости, то происходит линейное и угловое перемещение стержня (положение 1). Если сила Р приложена к центру упругости, то происходит только линейное перемещение стержня(положение 2). В последнем случае f1 = f2, вследствие чего
галопирование отсутствует.
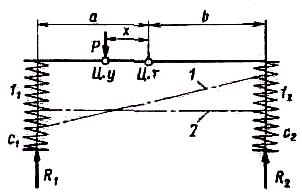
Рис. 52 Определение положения центра упругости
Определим величину х – расстояние от центра упругости до центра тяжести из условия равновесия стержня:
Мцт = R1a – Px – R2b = 0. (196)
Решив относительно х, получим:
х = (R1a – R2b)/Р. (197)
Заменим реакции R1 и R2 произведениями R1 = с1f1 и R2 = с2f2, следовательно Р = R1 + R2, откуда:
х
=
![]() .
(198)
.
(198)
Но по условию f1 = f2, то:
х
=
![]() .
(199)
.
(199)
Применим данное выражение к колебаниям кузова, заменив подрессоренную массу кузова mк тремя массами, связанными между собой невесомым стержнем (рис. 53,б).
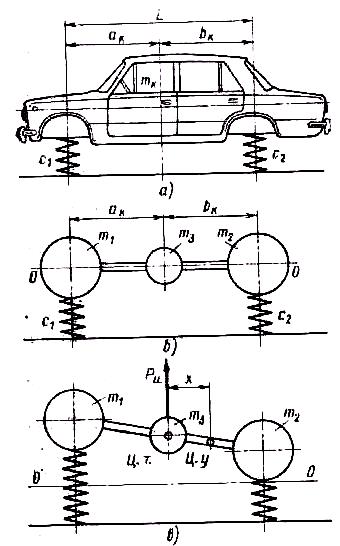
Рис. 53. Свободные колебания кузова
Чтобы система соответствовала в динамическом отношении действительной массе подрессоренной части автомобиля, необходимо соблюдение следующих условий:
1.сумма всех масс системы должна быть равна подрессоренной массе автомобиля:
m1 + m2 + m3 = mк. (200)
2. центр тяжести системы должен совпадать с центром тяжести кузова:
m1ак = m2bк. (201)
3. момент инерции системы относительно горизонтальной оси у должен равняться моменту инерции подрессренной массе авиомобиля относительно той же оси:
m1ак2 + m2bк2 = I = mкк2, (202)
где к – радиус инерции подрессоренной массы автомобиля.
Из уравнений (200) – (202) определим массы m1, m2, m3:
m1 = (mкк2)/(акL); (203)
m2 = (mкк2)/(bкL); (204)
m3
= mк .
(205)
.
(205)
Если стержень вывести из состояния равновесия, а затем отпустить, то он начнет колебаться (рис. 53,в). во время колебаний появляется сила инерции:
Ри = m3j. (206)
Она создает момент относительно центра упругости:
Ми = Рих = m3jх. (207)
Ми = 0, если m3 = 0 или когда х = 0. Из уравнения следует, что m3 = 0, если к2/(акbк) = 1, т. к. mк 0.для легковых автомобилей отношение к2/(акbк) близко к единице, вследствии чего они имеют хорошую плавность хода.
Если плечо х = 0 и центр тяжести совпадает с центром упругости, то:
х
=
![]() = 0. (208)
= 0. (208)
тогда с1ак = с2bк или с1/с2 = bк/ак.