

11.4. Автоколебания управляемых колес
Явление автоколебаний управляемых колес (шимми) проявляется в том, что у автомобиля с вполне исправным рулевым управлением и уравновешенными колесами на ровной дороге в определенном диапазоне скоростей могут возникать незатухающие колебания колес относительно шкворней при полностью неподвижном рулевом колесе. Причиной возникновения автоколебаний является наличие гироскопической и упругой связи между колебаниями передней оси автомобиля в поперечной плоскости и колебаниями (поворотами) колес вокруг осей шкворней. Для возникновения колебаний необходим первоначальный толчок, получаемый при наезде колеса на неровность дороги (рис. 68).
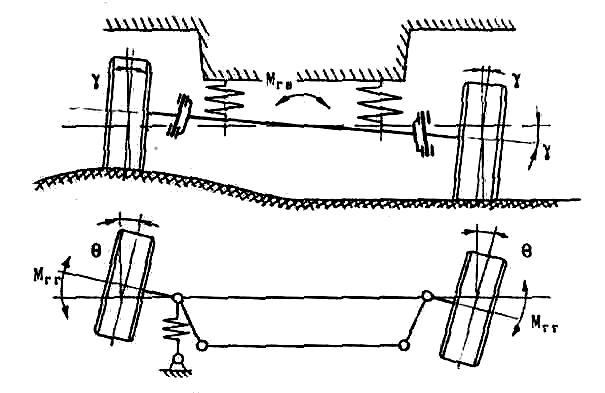
Рис. 68. Автоколебания управляемых колес автомобиля
При большой скорости автомобиля из-за быстрого вращения управляемых колес и резкого перекоса их осей на каждом из них возникает гироскопический момент, который действует в продольной плоскости, проходящей через переднюю ось:
Mгг
= Jк к![]() ,
(261)
,
(261)
где j - угол наклона (перекоса) оси вращения колеса (гироскопа).
Моменты Mгг при достаточной величине обеспечивают поворот управляемых колес вокруг осей шкворней на некоторый угол . В свою очередь, поворот быстро вращающихся колес вокруг шкворней приводит к появлению гироскопического момента Mгв, но в поперечной плоскости (рис. 68):
Mгв
= Jкк![]() ,
(262)
,
(262)
где - угол поворота управляемых колес.
Этот момент, в свою очередь, приводит к перекосу балки переднего моста, но уже в противоположную сторону. Этот перекос связан с неодинаковой радиальной деформацией шин вследствие перераспределения нормальных реакций между левым и правым колесом. Указанный перекос, в свою очередь, вызывает поворот управляемых колес в другую сторону и т.д.
Основным способом уменьшения шимми является применение независимой подвески управляемых колес, разрушающей гироскопическую связь между правым и левым колесом.
11.5. Колебания управляемых колес вследствие кинематического несоответствия подвески и рулевого управления
Перемещения колес относительно рамы (кузова) могут вызывать их поворот вокруг шкворней (рис. 69).
На рис. 69 видно, что при перемещении балки переднего моста и рамы (кузова) шарнир 1 на конце рычага 2 поворотной цапфы совершает колебания по дуге АА с центром колебаний т. О1, а с другой стороны, согласно кинематике рулевого привода, - по дуге ББ, описываемой концом продольной рулевой тяги 3. В действительности же шарнир 1 вследствие упругой деформации элементов подвески и рулевого привода будет перемещаться по некоторой промежуточной траектории ВВ, что вызовет
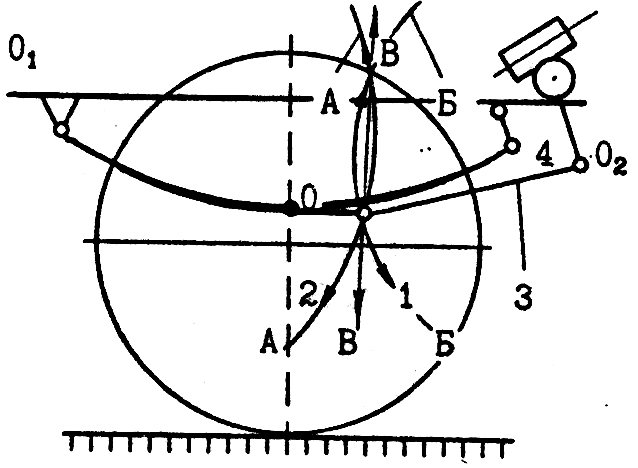
Рис. 69. Колебания управляемых колес из-за несогласованности передней подвески рулевого привода
поворот управляемых колес около шкворней. При этом частоты колебаний управляемых колес вокруг шкворней будут равны частотам вертикальных колебаний колес относительно рамы (кузова). Для повышения кинематического соответствия и уменьшения амплитуды колебаний рулевой механизм устанавливают впереди балки переднего моста или переносят серьгу (4) на передний конец рессоры.