Глава 5. Теория нелинейных сау
5.1. Типовые нелинейности
Все САУ, как правило, являются нелинейными. Однако первый этап изучения реальных систем состоит в исследовании их линейных математических моделей, которые являются наиболее простыми из возможных.
Теория линейных систем, базирующаяся на линеаризованных уравнениях движения, является достаточно хорошо разработанной отраслью науки. Применение этой теории к анализу и синтезу систем носит двоякий характер. Во-первых, имеется возможность совершенно строго анализировать методами линейной теории устойчивости «в малом» широкого класса реальных систем благодаря теореме Ляпунова об устойчивости по первому приближению.
Во-вторых, часто допускают, что отклонения характеристик системы от линейных малы и на основе этого применяют методы линейной теории для исследования поведения систем не только «в малом», но и «в большом». Полученные при таком допущении результаты могут быть подтверждены или опровергнуты практикой в зависимости от того, насколько значительно влияние отброшенных нелинейностей. Для детального и всестороннего изучения реальных систем линейные математические модели часто являются слишком упрощенными и грубыми, требуется рассмотрение нелинейных математических моделей.
Теория нелинейных автоматических систем, базирующаяся на нелинейных уравнениях движения, представляет собой значительно более широкую отрасль науки нежели теория линейных систем. Вместе с тем, вследствие трудности исследования нелинейных моделей, теория нелинейных систем разработана не столь полно, хотя и здесь достигнуты фундаментальные результаты.
Одна из проблем нелинейной теории состоит в анализе динамического поведения нелинейных САУ. Иными словами, первая задача нелинейной теории:
учесть наличие в уравнениях движения тех нелинейностей, которые присущи определенным звеньям реальной системы в силу их природы;
выяснить, как эти нелинейности влияют на работу системы;
найти пути компенсации вредного влияния и способы использования положительного влияния этих нелинейностей.
Другая проблема нелинейной теории состоит в синтезе таких нелинейных систем управления, которые наилучшим образом отвечали бы предъявляемым им требованиям. Иначе говоря, вторая задача теории нелинейных САУ состоит в том, чтобы выяснить, какие нелинейности должны быть специально введены в реальную систему для того, чтобы эта система была оптимальной с определенной точки зрения.
Вторая из указанных задач возникла значительно позже, чем первая. Она непосредственно связана с построением адаптивных и оптимальных САУ, с синтезом нелинейных законов управления.
При построении нелинейных моделей автоматических систем обычно выделяют несколько, например одно или два, звеньев системы с нелинейными уравнениями, считая при этом уравнения остальных звеньев линейными. Таким образом учитываются наиболее сильно выраженные нелинейности. Если движение остальных звеньев системы действительно достаточно точно описывается решениями линейных уравнений, то при таком способе исследования можно получить результаты, хорошо согласующиеся с опытными данными. Во всяком случае, такая нелинейная модель более полно отражает свойства реальной системы, нежели линейная модель, и поэтому позволяет получить существенную дополнительную информацию о поведении системы.
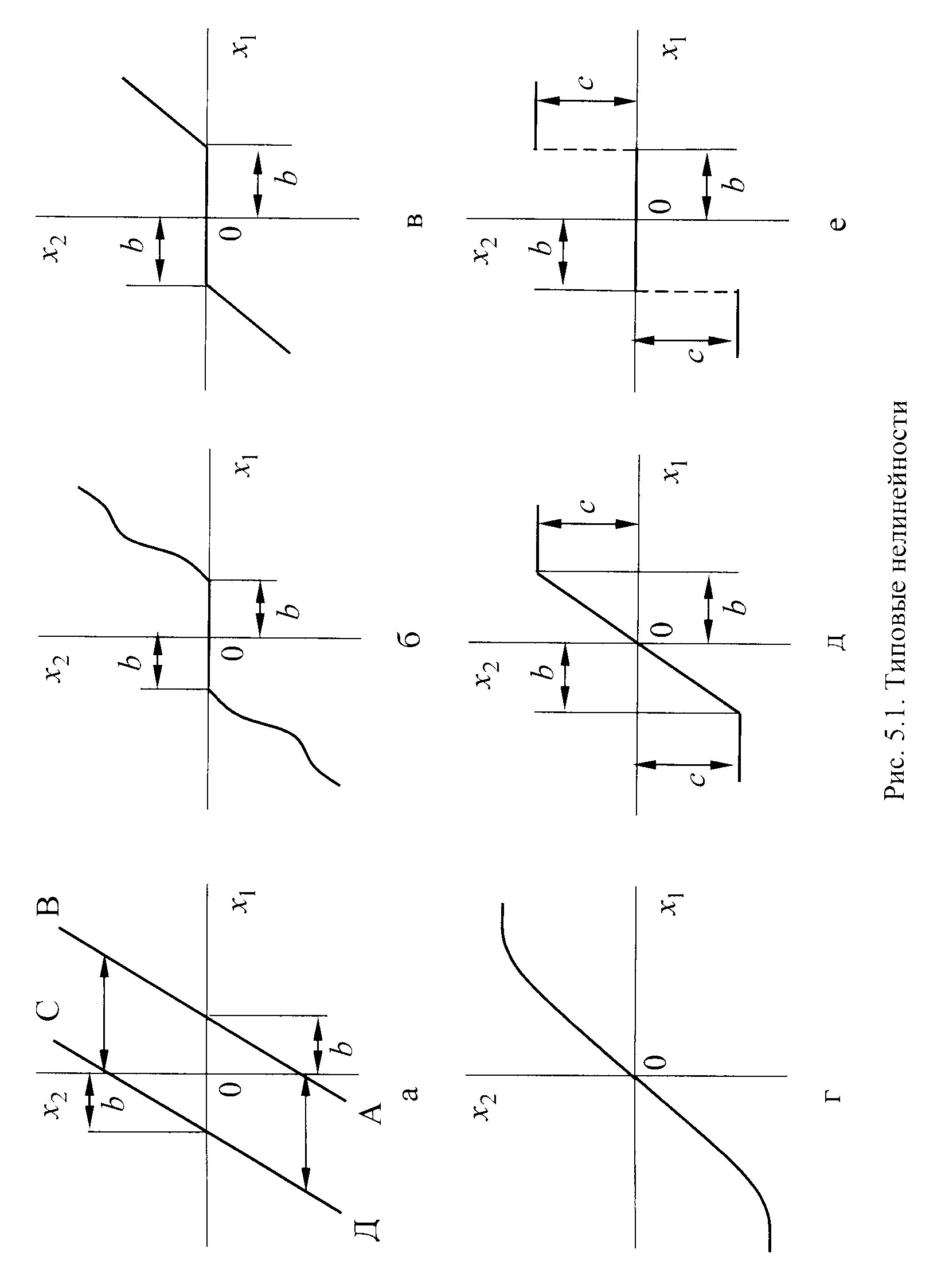
Прежде чем анализировать нелинейные системы, необходимо ввести понятие типовых нелинейностей, которые встречаются наиболее часто.
Одной из таких
нелинейностей является гистерезисная
петля люфта. Пусть
![]() и
и
![]() – углы поворота ведущей и ведомой
шестерней. При изменении
величина
остается постоянной, пока не будет
выбран люфт в зацеплении. Процессу
выборки люфта соответствует один из
горизонтальных отрезков характеристики,
изображенной на рис. 5.1 а, для которых
– углы поворота ведущей и ведомой
шестерней. При изменении
величина
остается постоянной, пока не будет
выбран люфт в зацеплении. Процессу
выборки люфта соответствует один из
горизонтальных отрезков характеристики,
изображенной на рис. 5.1 а, для которых
![]() ,
а движению с выбранным люфтом – один
из наклонных отрезков. При вращении
ведомой шестерни в одном направлении
(при возрастании
)
люфт выбран в одну сторону, а при вращении
в противоположном направлении – в
другую. Поэтому при возрастании
изображающая точка движется по прямой
АВ, а при убывании – по прямой СД:
,
а движению с выбранным люфтом – один
из наклонных отрезков. При вращении
ведомой шестерни в одном направлении
(при возрастании
)
люфт выбран в одну сторону, а при вращении
в противоположном направлении – в
другую. Поэтому при возрастании
изображающая точка движется по прямой
АВ, а при убывании – по прямой СД:
![]() (5.1)
(5.1)
где b – половина ширины люфта, к – коэффициент пропорциональности.
Горизонтальные отрезки между прямыми АВ и СД описываются уравнениями:
при
![]() (5.2)
(5.2)
В целом характеристика люфта (см. рис. 5.1 а) будет описываться уравнениями (5.1) и (5.2).
Типовой нелинейностью является мертвая зона (рис. 5.1 б), определяемая таким интервалом изменения входной координаты нелинейного звена, для которого выходная координата равна нулю. Мертвая зона имеется у характеристик большинства исполнительных элементов, при этом – управляющий сигнал, – скорость изменения координаты исполнительного органа.
При кусочно-линейной аппроксимации характеристика с мертвой зоной (рис. 5.1 в) может быть описана уравнениями:
 (5.3)
(5.3)
Для большинства усилительных и исполнительных устройств автоматики характерна нелинейность типа насыщения или ограничения мощности (рис. 5.1 г).
При кусочно-линейной аппроксимации (рис. 5.1 д) характеристика с насыщением имеет вид:
 (5.4)
(5.4)
Для электромеханических
элементов типичны релейные характеристики.
Релейной характеристикой
называется характеристика
![]() ,
представляющая собой такую зависимость
между входной
и выходной
координатами, при которой непрерывному
изменению
соответствует скачкообразное изменение
,
происходящее при определенных значениях
,
а между этими значениями координата
остается постоянной. Симметричная
релейная характеристика с мертвой зоной
(рис. 5.1 е), описывающая работу
трехпозиционного реле, имеет вид:
,
представляющая собой такую зависимость
между входной
и выходной
координатами, при которой непрерывному
изменению
соответствует скачкообразное изменение
,
происходящее при определенных значениях
,
а между этими значениями координата
остается постоянной. Симметричная
релейная характеристика с мертвой зоной
(рис. 5.1 е), описывающая работу
трехпозиционного реле, имеет вид:
 (5.5)
(5.5)
Пренебрегая мертвой зоной, если она мала, получим идеальную релейную характеристику (рис. 5.1 ж), описываемую уравнениями:
 (5.6)
(5.6)
Релейную характеристику с зоной неоднозначности (рис. 5.1 з) имеет двухпозиционное реле.
Часто встречаются комбинации указанных выше нелинейностей. Для гидравлического поршневого сервомотора типична характеристика с мертвой зоной и насыщением (рис. 5.1 и), для трехпозиционного электромагнитного реле – релейная характеристика с мертвой зоной и зонами неоднозначности (рис. 5.1 к).