

Теперь допустим исходная система уравнений имеет вид
 (5.56)
(5.56)
где
![]() –
постоянные коэффициенты; P,
Q – члены, обращающиеся
в начале координат в нуль по крайней
мере как бесконечно малые второго
порядка. Пусть
,
– корни характеристического уравнения
линейной системы, полученной из (5.56) при
–
постоянные коэффициенты; P,
Q – члены, обращающиеся
в начале координат в нуль по крайней
мере как бесконечно малые второго
порядка. Пусть
,
– корни характеристического уравнения
линейной системы, полученной из (5.56) при
![]() ,
т.е. корни уравнения
,
т.е. корни уравнения
![]() ,
(5.57)
,
(5.57)
причем будем полагать выполненным неравенство
![]() .
(5.58)
.
(5.58)
Доказано,
что нелинейная система (5.56) имеет особую
точку
![]() одного из рассмотренных выше типов:
одного из рассмотренных выше типов:
Устойчивый фокус, если корни комплексные с отрицательными вещественными частями.
Неустойчивый фокус, если корни комплексные с положительными вещественными частями.
Устойчивый узел, если корни вещественные отрицательные.
Неустойчивый узел, если корни вещественные положительные.
Седло, если корни вещественные разных знаков.
Центр или фокус, если корни чисто мнимые, в зависимости от вида функций P и Q .
В каждом случае фазовые траектории системы в малой окрестности особой точки аналогичны соответствующим траекториям линейной системы.
5.5. Фазовые траектории нелинейных систем.
Устойчивые и неустойчивые предельные циклы
5.5.1. Фазовые траектории нелинейных систем. Фазовые траектории нелинейных САУ могут быть получены путем приближенного интегрирования дифференциальных уравнений. Если P и Q – кусочно-линейные функции, то система
 (5.59)
(5.59)
представляет
собой ряд подсистем линейных
дифференциальных уравнений, каждая из
которых справедлива в определенной
области
![]() плоскости
.
В каждой области
фазовые траектории могут быть определены
как часть траекторий соответствующей
линейной системы; сшиванием траекторий,
принадлежащих областям
,
находятся траектории на всей плоскости
.
плоскости
.
В каждой области
фазовые траектории могут быть определены
как часть траекторий соответствующей
линейной системы; сшиванием траекторий,
принадлежащих областям
,
находятся траектории на всей плоскости
.
Для линейных систем факт сходимости процессов к состоянию равновесия не зависит от начальных условий. В нелинейных системах возможны более сложные случаи, когда переходные процессы сходятся к состоянию равновесия при одних и расходятся при других начальных условиях. Если переходный процесс сходится к состоянию равновесия при малых отклонениях от этого состояния и расходится в бесконечность при больших отклонениях, то границей между областями сходимости и расходимости на фазовой плоскости обычно служит замкнутая траектория, соответствующая периодическому процессу, рис. 5.22.
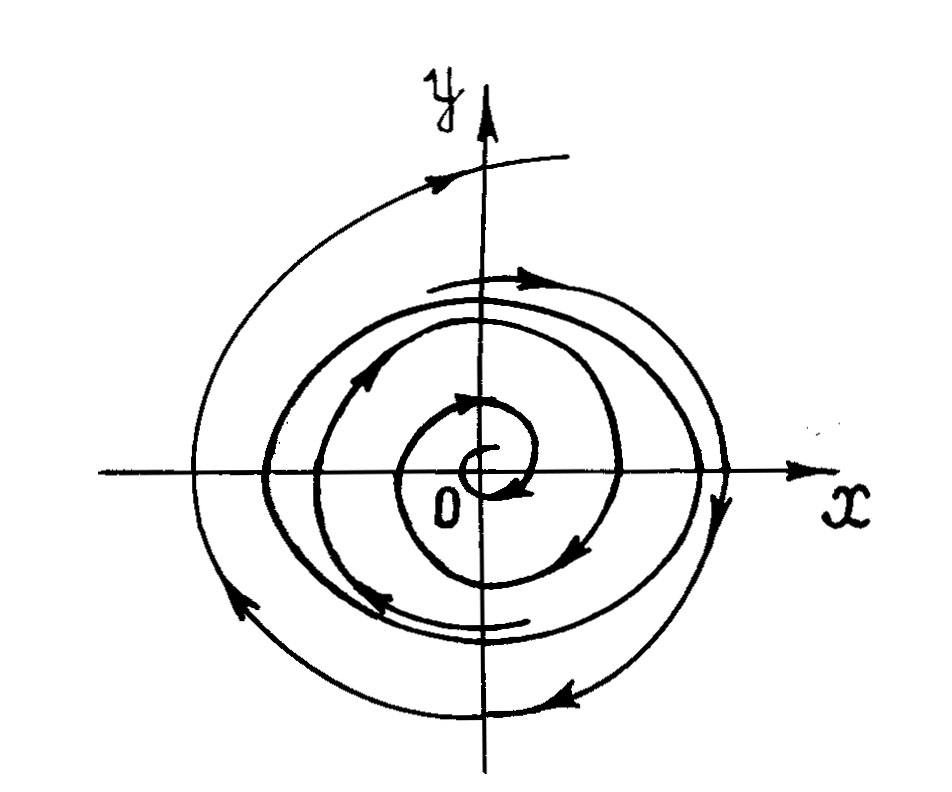
Рис. 5.22. Фазовая
траектория
Такую изолированную замкнутую траекторию называют предельным циклом. При сколь угодно малом начальном отклонении от этой траектории изображающая точка уходит либо к началу координат, либо в бесконечность. Поэтому периодическое движение в данном случае неустойчиво, а соответствующий ему на фазовой плоскости предельный цикл носит название неустойчивого предельного цикла.
В нелинейных системах возможны и устойчивые предельные циклы, на которые фазовые траектории асимптотически наматываются изнутри и снаружи, рис. 5.23. На фазовом портрете, изображенном на рис. 5.23, состояние равновесия системы при неустойчиво. Все движения системы, независимо от величины начальных отклонений, заканчиваются стационарными колебаниями вполне определенного характера.
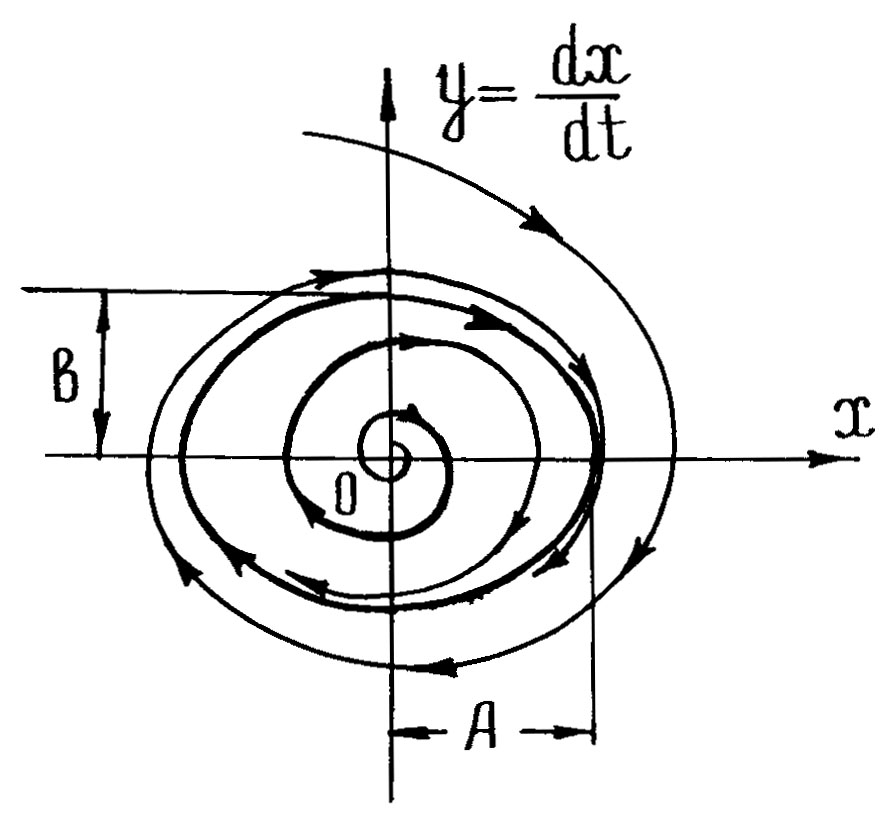
Рис. 5.23. Фазовый
портрет
В нелинейных системах возможны случаи, когда одновременно имеется несколько предельных циклов, устойчивых и неустойчивых. Предельные циклы, также как и отрезки покоя, являются примерами особых линий на фазовой плоскости.
Возможен также случай более удаленного предельного цикла, рис. 5.24, соответствующий автоколебаниям с большой амплитудой.
Рис. 5.24. Фазовый
портрет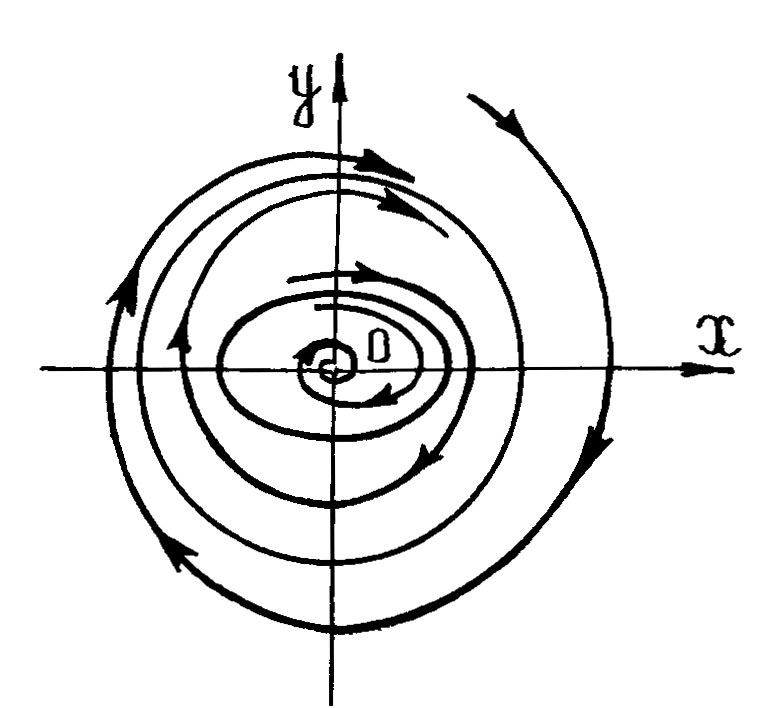


Такие же принципиальные качественные изменения картины фазовых траекторий при достаточно больших отклонениях могут наблюдаться и в случаях апериодических процессов, включая превращения их в колебательный и наоборот, рис. 5.25.
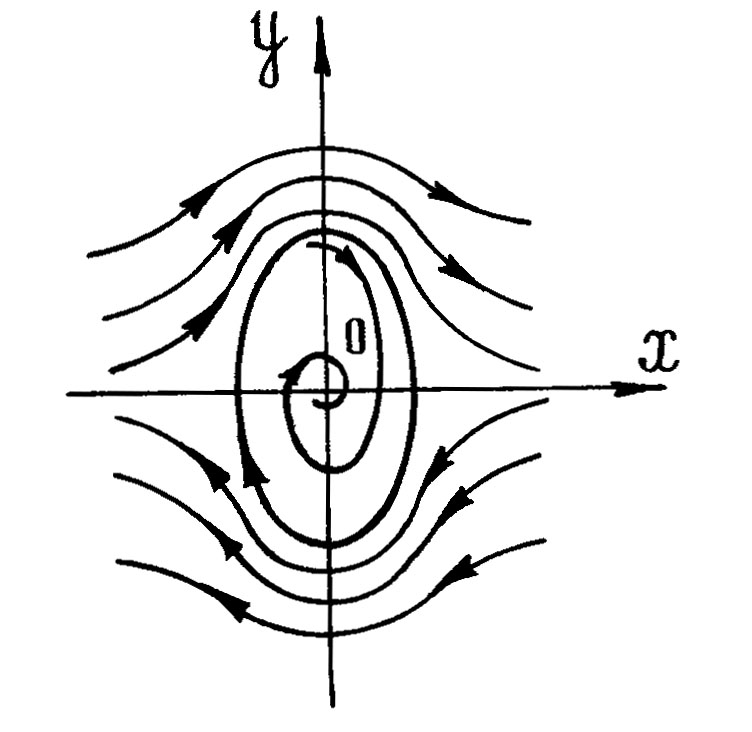

Рис. 5.25. Фазовые
траектории
Аналогично для системы, находящейся согласно линейной теории на границе устойчивости (при чисто мнимых корнях), картина фазовых траекторий при больших отклонениях, если линейность характеристик звеньев системы нарушается возможен вариант изменения фазовых траекторий при больших отклонениях, как это показано на рис. 5.26. Здесь, кроме особой точки О типа центра, появляются два седла С1 и С2, что приводит фактически к неустойчивости системы. Но может иметь место и предельный цикл. Особые линии такого типа, как С1 А1 С2 и С2 А2 С1 , на фазовой плоскости называются сепаратриссами.
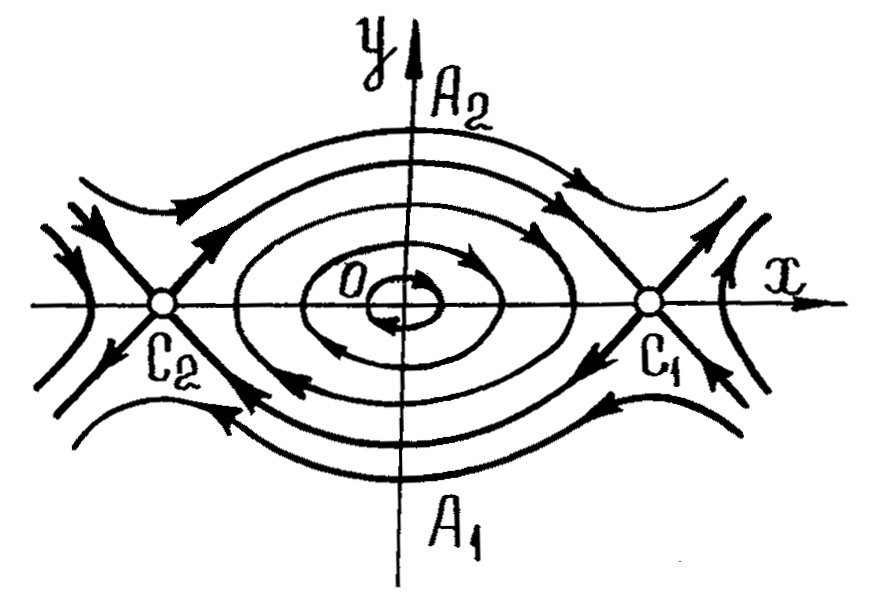

Рис. 5.26. Фазовые
траектории
Здесь говорилось пока о системах, которые при малых отклонениях рассматриваются как линейные. Но совершенно аналогичная картина получается и для нелинейных САУ, которые даже в малом нельзя рассматривать как линейные. Таковыми являются многочисленные типы релейных систем, а также систем с зоной нечувствительности, с гистерезисной петлей, с сухим трением, с зазором. Интересно отметить, что некоторые из таких систем скорее в большом, чем в малом, могут приблизиться к линейным, когда зона нечувствительности или зазор оказываются малыми по сравнению с величиной отклонений.
В системах с зоной нечувствительности и с сухим трением существуют, как известно, области застоя, когда установившемуся состоянию при данных внешних условиях соответствует не одна точка, а целая область возможных равновесных состояний системы. На фазовой плоскости это выражается в особый отрезок, рис. 5.27.
Рис. 5.27. Фазовые
траектории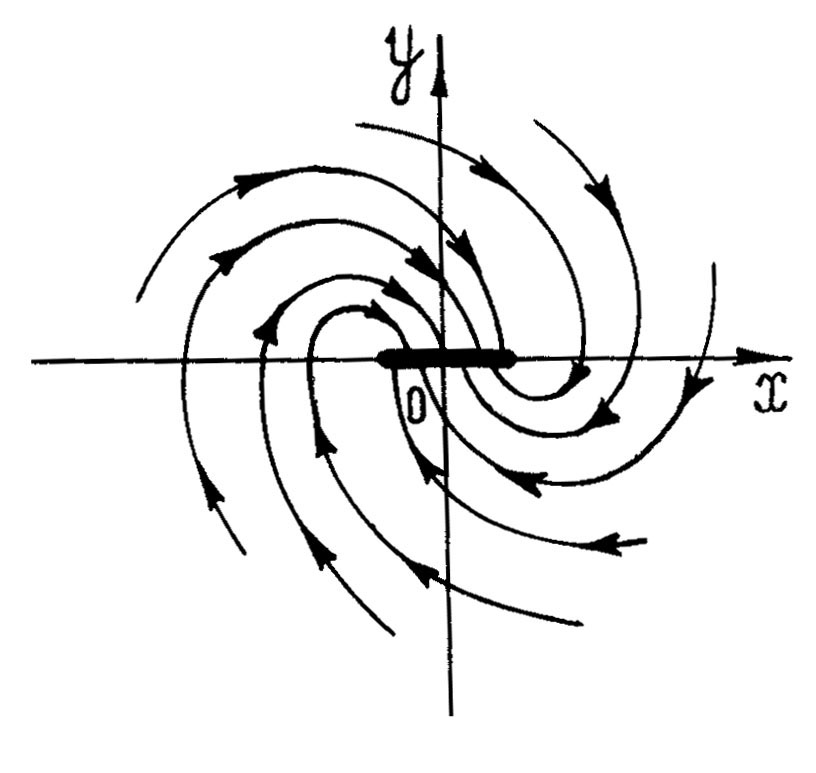

Заметим, наконец, что координатами фазовой плоскости могут служить не обязательно отклонения управляемой величины и скорость ее, как рассмотрено выше. Для этой цели могут быть взяты любые две переменные, однозначно характеризующие состояние системы второго порядка в произвольный момент времени.
5.5.2. Автоколебания нелинейных систем. В реальных САУ наблюдаются периодические движения, называемые автоколебаниями и обладающие следующими особенностями.
Первым признаком того, что данное незатухающее колебание относится к автоколебаниям, является отсутствие периодического внешнего воздействия: автоколебания являются собственными колебаниями системы. Форма и частота автоколебаний не зависит от начальных условий. Автоколебания, устанавливающиеся в данной системе после окончания переходных процессов, имеют вполне определенную форму и частоту, которые могут быть изменены лишь изменением параметров системы, т.е. коэффициентов уравнений движения системы.
Наконец, характерной особенностью автоколебаний является то обстоятельство, что они обычно не исчезают при достаточно малых изменениях начальных условий и параметров системы. Точнее, если автоколебания существуют, то они существуют для целой области начальных отклонений. И если автоколебания возникают при каких-то определенных параметрах системы, то они возникают и при других, близких к ним, значениях параметров, несколько меняясь при этом по форме и частоте.
Для теории автоматического управления изучение автоколебаний весьма существенно, так как в большинстве своем САУ в равной степени могут работать и как системы стабилизации и как автоколебательные системы: они обычно являются потенциально автоколебательными системами. Часто конструкторам приходится затрачивать много времени и труда, чтобы устранить автоколебания. Но иногда наоборот автоколебательные режимы являются нормальными режимами работы системы, если это позволяют условия процесса управления.
САУ, где амплитуда выходного параметра управления не превышает допустимой величины, называются практически устойчивыми. Если же амплитуда автоколебаний настолько велика, что система становится неудовлетворительной по требованию качества, ее считают практически неустойчивой.
В отдельных случаях автоколебания позволяют добиться определенных положительных свойств, в частности, уничтожить застой в зоне нечувствительности. Благодаря непрерывным колебаниям обеспечивается режим динамической смазки в гидравлических системах.
При проектировании нелинейных систем важно определить допустимые значения амплитуды и частоты автоколебаний, а также характер влияния отдельных параметров системы на изменение амплитуды и частоты, чтобы достигнуть требуемых свойств автоколебательного режима.
5.5.3. Коррекция нелинейных САУ. Для улучшения процесса управления в нелинейных САУ также, как и в линейных САУ, используют корректирующие цепи. Благодаря применению корректирующих устройств удается добиться устойчивости системы, устранить или снизить до практически допустимых значений автоколебания и улучшить качество переходного процесса. В нелинейных САУ находят применение:
Последовательные корректирующие цепи, позволяющие осуществить введение в закон управления производных и интегралов.
Параллельные корректирующие цепи в виде различных жестких и гибких обратных связей.
Корректирующие устройства, с помощью которых осуществляется введение в закон управления сигналов, пропорциональных возмущающему моменту.
Для улучшения переходного процесса в релейных системах применяют корректирующие устройства, например, гибкую обратную связь (рис. 5.28), по скорости изменения выходной координаты исполнительного двигателя. Сущность влияния гибкой обратной связи на повышение устойчивости системы, а также на подавление автоколебаний можно пояснить следующим образом. Поскольку причиной автоколебаний является наличие запаздывания в релейном устройстве, то для уменьшения или устранения автоколебаний следует обеспечить опережение переключения реле. Следовательно, если на выходной оси исполнительного двигателя установить тахогенератор и напряжение с него подавать на дополнительную обмотку реле, то напряжение, подаваемое в якорную цепь двигателя, будет изменяться согласно формуле
![]() .
(5.60)
.
(5.60)
Переключение будет происходить раньше, чем угол рассогласования достигнет значения, близкого к нулю, т.е. с опережением.

Безразмерные уравнения движения данной релейной системы будут иметь следующий вид
![]() ,
(5.61)
,
(5.61)
где – безразмерный коэффициент пропорциональности тахогенератора, определяющий крутизну его характеристики, а следовательно, интенсивность воздействия сигнала обратной связи.
![]() .
.
При
![]() в системе возникают автоколебания. На
рис. 5.29 показан график переходного
процесса для условия
.
в системе возникают автоколебания. На
рис. 5.29 показан график переходного
процесса для условия
.
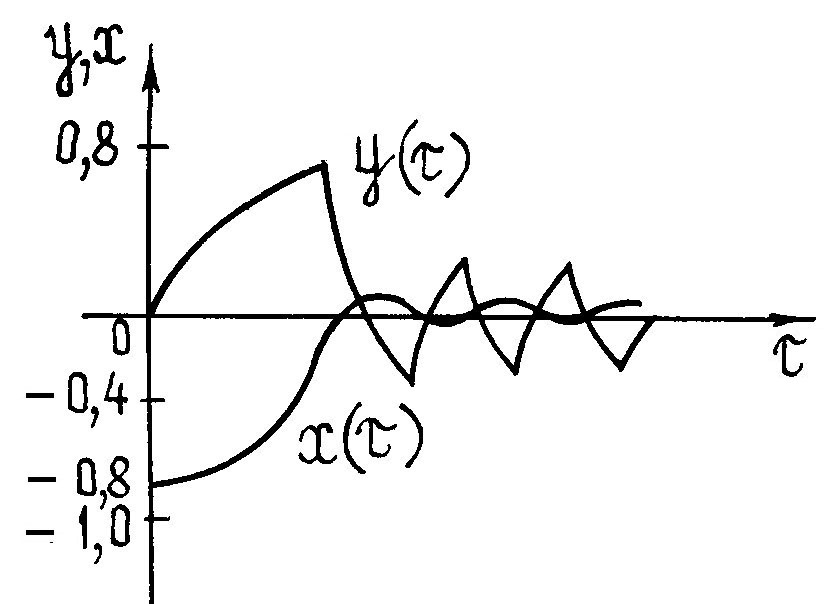
Рис. 5.29. Переходный
процесс
С увеличением колебательный переходный процесс становится по своей тенденции апериодическим. В этом случае автоколебания, уменьшаясь по амплитуде, не вызывают изменение знака отклонения, вследствие чего процесс становится монотонно затухающим с наличием автоколебаний, рис. 5.30.
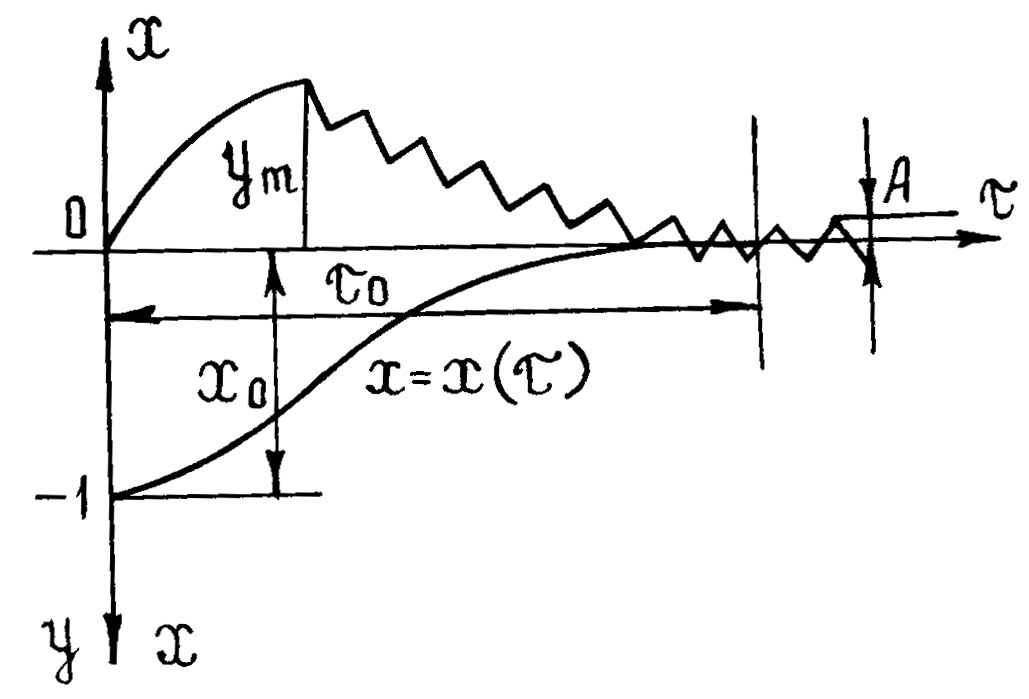
Рис. 5.30. Переходный
процесс
Однако в связи с этим увеличивается и время управления. При проектировании выбирают такое значение , чтобы удовлетворить техническим требованиям, как по длительности переходного режима, так и по допустимым характеристикам автоколебаний.
На рис.
5.31 изображен график зависимости
автоколебаний, характеризуемых скоростью
в точке пересечения фазовой траекторией
линии переключения, от времени запаздывания
![]() и коэффициента демпфирования .
Из графика следует, что с увеличением
сигнала от тахогенератора, подаваемого
на вход релейного усилителя, амплитуда
автоколебаний уменьшается.
и коэффициента демпфирования .
Из графика следует, что с увеличением
сигнала от тахогенератора, подаваемого
на вход релейного усилителя, амплитуда
автоколебаний уменьшается.
Аналогичная картина получается при охвате обратной связью (тахогенератором) реле, имеющего одновременно зону нечувствительности и петлю гистерезиса. В связи с этим следует отметить, что влияние автоколебаний можно в значительной степени снизить путем выбора определенных параметров релейной характеристики. В частности, увеличение ширины зоны нечувствительности способствует успокоению колебаний, а увеличение петли гистерезиса, напротив, увеличивает колебательность системы.
Если на релейную систему непрерывно воздействует периодически изменяющийся сигнал, то в релейной системе устанавливаются вынужденные колебания с частотой изменения входного возмущения. При этом частота не зависит от того, имеются ли в релейной системе автоколебания. Однако, в отличие от линейной системы в релейной системе вынужденные автоколебания с частотой возмущения могут существовать лишь при определенных условиях: если в системе произойдет синхронизация автоколебаний с частотой вынужденных колебаний, а, следовательно, их подавление. Автоколебания подавляются, если вынужденные колебания имеют частоту, превышающую собственную частоту автоколебаний системы. Внешнее периодическое воздействие как бы навязывает системе свою частоту.
Процесс синхронизации автоколебаний по частоте вынужденных колебаний носит название захватывания частоты. В случае, если не обеспечивается захватывание частоты при периодическом воздействии, в системе наряду с вынужденными колебаниями частоты продолжают существовать автоколебания.
Режим вынужденных колебаний в результате захватывания частоты является периодическим режимом. Если частота внешних периодических воздействий значительно превышает частоту автоколебаний системы, то оказывается возможным подавить автоколебания большой амплитуды и малой частоты и превратить систему в устойчивую.
Используя явление захватывания частоты, можно добиться линеаризации релейных систем за счет внешних высокочастотных колебаний. Действительно, всегда можно так подобрать параметры системы, что ее вынужденные колебания будут иметь весьма малую амплитуду, а следовательно, амплитуда автоколебаний может практически не оказывать влияния на устойчивость системы, т.е. представляется возможность приблизить нелинейную автоколебательную систему к линейной и применить для ее расчета методы линейной теории автоматического управления.
На основе этих свойств был разработан вибрационный способ линеаризации нелинейных систем. Этот способ применяют для устранения влияния нелинейности. Так, если сообщить вынужденную вибрацию с большой частотой, например золотнику гидроусилителя, то гидроусилитель будет работать по линейному закону. Линеаризацию релейных систем можно также осуществлять, используя автоколебательный режим системы. Необходимое условие такой линеаризации заключается в том, чтобы обеспечит малую амплитуду и высокую частоту автоколебаний, которые, накладываясь на медленно изменяющийся полезный сигнал, вызывали бы эффект, аналогичный эффекту при вибрационной линеаризации.