

2 Описание лабораторной установки
2.1 Конструкция лабораторного стенда
Состав лабораторной установки для проведения исследований приведен на рисунке 3. Объектом регулирования является лабораторная электропечь 1. Печь получает питание от автотрансформатора 2. Плавное изменение напряжения, снимаемого с автотрансформатора, производится при помощи исполнительного механизма 3 типа МЭО. Подвижный контакт автотрансформатора связан с выходным валом исполнительного механизма цепной передачей.
Автоматическое регулирование температуры в печи производится импульсным микропроцессорным регулятором ТРМ 12 поз. 5 Датчиком системы служит термоэлектрический преобразователь 4. Вырабатываемая датчиком термо - ЭДС поступает непосредственно на вход регулятора.
Выходной сигнал регулятора приводит в действие исполнительный механизм 3, который изменяет напряжение питания, подаваемое с автотрансформатора 2 на печь 1, и оказывает тем самым регулирующее воздействие на объект регулирования. В зависимости от знака и величины отклонения температуры от заданного значения управляющее напряжение через контакты выходных реле регулятора подается на клеммы исполнительного механизма МЭО. Под действием этого напряжения ротор двигателя исполнительного механизма вращается в ту или другую сторону и через систему передачи перемещает подвижный контакт автотрансформатора, изменяя тем самым подводимую к печи мощность.
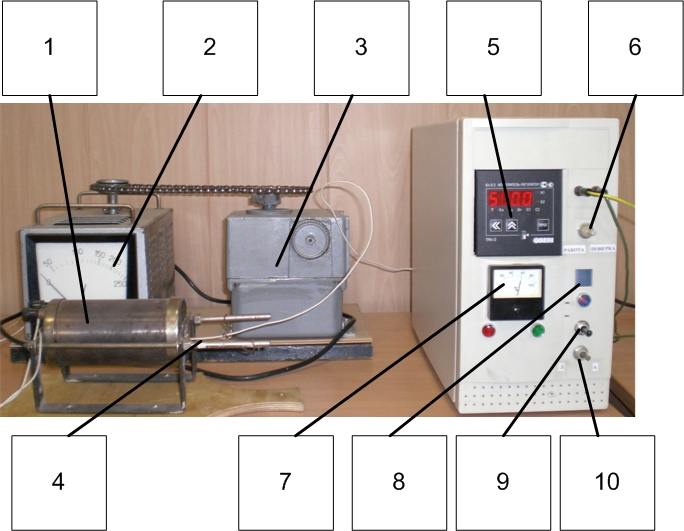
Р исунок
3 – Схема лабораторного стенда для
исследования работы АСР
исунок
3 – Схема лабораторного стенда для
исследования работы АСР
Диапазон поворота выходного вала исполнительного механизма ограничивается конечными выключателями.
На выходном валу исполнительного механизма закреплен подвижный контакт реостатного датчика (реостата обратной связи), который в комплекте с дистанционным указателем положения типа ДУП-М (позиция 7) служит для дистанционного наблюдения за состоянием исполнительного механизма.
В системе предусмотрена возможность ручного дистанционного управления исполнительным механизмом с помощью ключа 9. Выбор режима управления исполнительным механизмом (дистанционное - от ключа 9 или автоматическое - от регулятора) производится переключателем 10.
В нижнем левом углу стенда находятся общий выключатель (кнопка 8), и переключатель 6 режима «работа-поверка».
2.2 Микропроцессорный измеритель-регулятор трм 12
Используемый в данной системе микропроцессорный программируемый измеритель-регулятор ТРМ 12 является одним из приборов серии ТРМ производственного объединения «ОВЕН». Общая характеристика прибора и описание приемов работы и программирования приведены в методических указаниях, посвященных поверке этого прибора [см. лабораторную работу 2 «Измерение температуры термоэлектрическими преобразователями и исследование работы многоканального измерителя ТРМ-12» настоящего лабораторного практикума.]. В данной работе рассматриваются вопросы, связанные с выполнением им функции регулирования.
Прибор ТРМ 12 предназначен для измерения и регулирования технологических параметров в комплекте с электрическими исполнительными механизмами по пропорционально-интегральному и пропорционально-интегрально-дифференциальному законам.
Измерение
регулируемого параметра и формирование
регулирующего воздействия выполняется
циклически с периодом 4 секунды. Этот
интервал называется шагом регулирования.
Полученное за этот период среднее
значение регулируемого параметра
(например, температуры) Тi
сравнивается с заданием (уставкой)
ТУСТ
,
после чего производится вычисление
длительности управляющего импульса
![]() по формуле:
по формуле:
|
|
где Ei - величина рассогласования Ei = ТУСТ – Тi;
ΔEi - величина изменения рассогласования по сравнению с предыдущим шагом регулирования ΔEi = Ei - Ei-1 ;
K и τ - параметры настройки регулятора, эквивалентные Кр и ТД.
Знак
определяет
полярность управляющих импульсов. При
![]() выдается импульс на выходное реле с
контактом «больше», при
выдается импульс на выходное реле с
контактом «больше», при
![]() срабатывает реле с контактом «меньше».
Если рассчитанная длительность импульса
получилась по модулю меньше 0,05с, то
управляющий импульс не выдается
(принимается
срабатывает реле с контактом «меньше».
Если рассчитанная длительность импульса
получилась по модулю меньше 0,05с, то
управляющий импульс не выдается
(принимается
![]() ).
).
Если в течение шага регулирования температура объекта изменится меньше, чем на 0,1°С, то величина ΔEi принимается равной нулю. В результате дифференциальная составляющая ПИД-регулятора перестает оказывать влияние на длительность управляющих импульсов:
|
|
Данного явления
можно избежать путем увеличения интервала
между вычислениями управляющего
воздействия. Этот интервал задается
параметром настройки
![]() .
Например, при
.
Например, при
![]() вычисление длительности импульсов
производится не каждые 4 секунды, а лишь
в каждом четвертом шаге регулирования,
т.е. цикл составляет 16 с.
вычисление длительности импульсов
производится не каждые 4 секунды, а лишь
в каждом четвертом шаге регулирования,
т.е. цикл составляет 16 с.
Просмотр и
программирование параметров настройки
регулятора (уставки Т и коэффициентов
![]() )
и параметров режима работы выполняются
в режиме «программирование». Все
введенные параметры заносятся в
перепрограммируемое энергонезависимое
запоминающее устройство, что обеспечивает
их сохранность и неизменность при
отключении питания прибора.
)
и параметров режима работы выполняются
в режиме «программирование». Все
введенные параметры заносятся в
перепрограммируемое энергонезависимое
запоминающее устройство, что обеспечивает
их сохранность и неизменность при
отключении питания прибора.