

курсовик (14)
.DOCМинистерство образования и науки Российской Федерации
Омский государственный технический университет
Кафедра САПР М и ТП
Курсовая работа по дисциплине:
Основы Теории Управления
Выполнил:
Студент группы ивт-235
Бурда Наталья Викторовна
Проверил:
Доцент Юдин В.А.
Омск-2006
СОДЕРЖАНИЕ.
1.Задание
Основная часть
2.Передаточная функция разомкнутой системы W(p)
3.Передаточная функция замкнутой системы Ф(p)
4.Передаточная функция замкнутой ошибки Wx(p)
5.Дифференциальное уравнение замкнутой системы
6.Характеристическое уравнение замкнутой системы
7.Дифференциальное уравнение ошибки
8.Первые два коэффициента ошибок с0,с1
9.Схема САУ для моделирования её на ПК
10.Коэффициенты системы
11.Интегральная оценка (расчеты, графики)
1.Задание.

-
Передаточную функцию разомкнутой системы W(p).
-
Передаточную функцию замкнутой системы Ф(p).
-
Передаточную функцию ошибки Wx(p).
-
Записать дифференциальное уравнение замкнутой системы.
-
Записать характеристическое уравнение замкнутой системы.
-
Записать дифференциальное уравнение для ошибки.
-
Найти первые 2 коэффициента ошибки(C0,C1).
-
Пользуясь структурным методом моделирования составить схему для моделирования САУ на ПК и рассчитать коэффициенты модели.
-
Выбрать параметры корректирующих устройств, обеспечивающих минимум интегральной оценки и построить переходный процесс при выбранных параметрах.
10. Построить переходный процесс для найденных параметров корректирующих устройств, определить качественный характер переходного процесса.
2.Передаточная функция разомкнутой системы.

Т.к. все элементы расположены последовательно, то Wоб(p) будет выглядеть следующим образом:
![]()
Раскрыв скобки получим:
![]()
3.Передаточная функция замкнутой систем.
Известно, что![]() ,
, ,
,
тогда передаточная функция замкнутой системы будет иметь вид:
![]()
4.Передаточная функция ошибки.
Известно, что

Тогда передаточная функция ошибки будет иметь вид:
![]()
Зная, что
![]() ,
получим
,
получим

И тогда получаем:

5.Дифференциальное уравнение замкнутой системы.
![]()
Тогда дифференциальное уравнение будет иметь вид:

6.Характеристическое уравнение замкнутой системы.
Известно, что характеристическое уравнение любой замкнутой системы имеет общий вид R(p)+Q(p)=0, тогда для данной замкнутой системы характеристическое уравнение будет выглядеть следующим образом:
![]()
![]()
7.Дифференциальное уравнение ошибки.

В итоге получаем дифференциальное уравнение ошибки:

8.Коэффициенты ошибки.
Используя уравнение ошибки:

Разделим числитель на знаменатель(для упрощения процесса деления произведем замены:
 ,
,
где


Проведя деление получаем,
сопоставив с
рядом
![]() ,
,
очевидно что
![]()
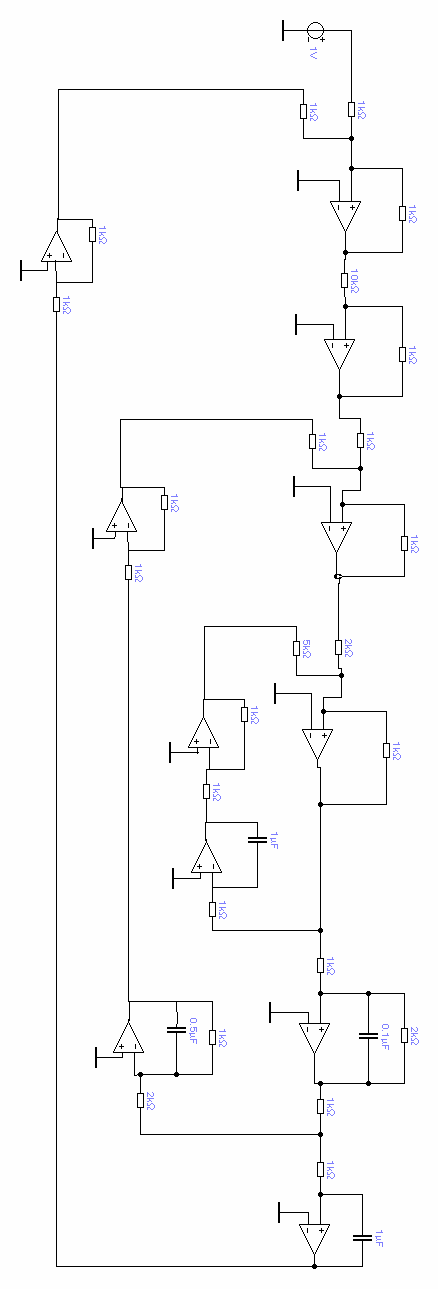
9.Схема САУ для моделирования её на ПК.
10.Коэффициенты.

![]()
![]()
11.Параметры корректирующих устройств,
обеспечивающих минимум интегральной оценки.
Переходный процесс.

|
T3=0,01c |
|
|
|
|
k5 |
I |
|
1 |
0,001 |
0,099 |
|
2 |
0,01 |
0,099 |
|
3 |
0,5 |
0,102 |
|
4 |
1 |
0,11 |
|
5 |
1,5 |
0,117 |
|
6 |
2 |
0,12 |
|
7 |
2,5 |
0,15 |
|
8 |
10 |
0,41 |
|
9 |
20 |
0,8 |
|
10 |
40 |
1,52 |
|
|
|
|
|
k5=0,5 |
|
|
|
|
T |
I |
|
1 |
0,000001 |
0,102 |
|
2 |
0,01 |
0,1002 |
|
3 |
0,02 |
0 |
|
4 |
0,05 |
0,096 |
|
5 |
0,5 |
0,095 |
|
6 |
0,8 |
0,096 |
|
7 |
0,9 |
0,0962 |
|
8 |
1 |
0,10255 |
|
9 |
100 |
0,0984 |
|
10 |
10000 |
0,099 |
|
11 |
1000000 |
0,102 |
 ,0962
,0962
Теперь, исходя из выше приведённых
графиков, примем
![]() и
и
![]() 0,5с.
0,5с.
После установления в модели системы оптимальных параметров получен переходный процесс, изображённый на следующем графике:

График интегральной оценки при этом выглядит так:
