

курсовик (11)
.doc
Министерство образования и науки РФ
Омский государственный технический
университет
Кафедра информатики и вычислительной
техники
КУРСОВАЯ РАБОТА
по
дисциплине
“Основы теории управления”
ВЫПОЛНИЛ:
студент гр. В-213
____________________
Toiffel
;)
ПРОВЕРИЛ: доцент
_________________ Юдин
В.А.
Омск 2004
Оглавление
Структурная схема САУ
На рис. 1 представлена структурная схема исследуемой системы.

Рис. 1. Структурная схема САУ
Передаточная функция разомкнутой системы w(p)
Обозначим передаточные функции звеньев САУ следующим образом:

Для параллельного соединения звеньев имеем:
![]()
Для звена, охваченного обратной отрицательной связью:

Тогда передаточная функция разомкнутой системы имеет вид:


Передаточная функция замкнутой системы Φ(p)

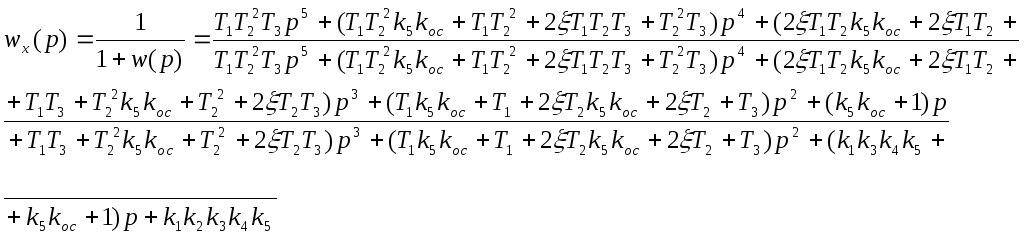
Передаточная функция ошибки wx(p)
Дифференциальное уравнение замкнутой системы
По определению передаточной функции замкнутой системы:
![]()
Запишем это уравнение в стандартной
форме и произведем замену![]()

Характеризующее уравнение замкнутой системы
Для получения характеризующего уравнения замкнутой системы сложим числитель и знаменатель передаточной функции разомкнутой системы и приравняем результат к 0.
![]()
Дифференциальное уравнение ошибки
По определению передаточной функции ошибки:
![]()
После преобразований получим

Коэффициенты ошибки c0 , c1
Для получения первых двух коэффициентов ошибки разделим числитель на знаменатель передаточной функции ошибки и сравним результат с разложением этой функции в ряд Тейлора. Деление достаточно провести до получения полинома первой степени.
 Тогда
Тогда

Структурное моделирование САУ
На рис. 2 представлена электрическая модель исследуемой системы, составленная с помощью метода структурного моделирования САУ.

Рис. 2. Электрическая модель САУ
В табл. 1 приведены коэффициенты модели (символом * помечены коэффициенты, значения которых необходимо выбрать для обеспечения минимума интегральной оценки качества).
|
Коэффициент |
Значение |
|
k1 |
10 |
|
k2 |
* |
|
k3 |
2 |
|
T1 |
0,15 с. |
|
k4 |
5 |
|
T2 |
0,1 с. |
|
ξ |
0,8 |
|
k5 |
3 |
|
T3 |
0,12 с. |
|
kос |
* |
Табл. 1. Коэффициенты модели
Проведем расчет электрической схемы по заданным параметрам.
Масштабирующий операционный усилитель
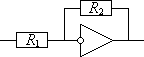
Рис. 3. Масштабирующий ОУ
Коэффициент усиления определяется как
![]()
В нашем случае
![]()
Для расчета корректирующего усилителя воспользуемся формулой
![]() (1)
(1)
Интегрирующее звено

Рис. 4. Интегрирующее звено
Коэффициент усиления равен
![]()
Для расчета емкости C1 будем пользоваться формулой
![]() (2)
(2)
Инерционное звено

Рис. 5. Инерционное звено
Для данного звена справедливы соотношения
![]()
С помощью данных формул рассчитаем емкости С2 и C5

Колебательное звено

Рис. 6. Колебательное звено
Масштабирующие коэффициенты Ki соответственно равны
![]()
С другой стороны
![]()
В нашем случае

Остальные сопротивления примем равными 1МОм, а емкости – 1мкФ.
Выбор параметров корректирующих устройств
В табл. 1 присутствуют
два неизвестных коэффициента: k2
и kос, значения
которых необходимо подобрать для
обеспечения минимума интегральной
оценки
![]() .
Вместо того, чтобы изменять эти два
коэффициента одновременно, зафиксируем
вначале kос и построим
график зависимости интегральной оценки
для ряда значений k2,
рассчитывая параметры звеньев при
помощи соотношений (1) и (2). В качестве
начального значения был взят kос
= 30. Как видно из рис. 7, минимум интегральной
оценки, равный 0,125, был получен при
значении k2 = 1. Затем
в качестве фиксированного параметра
был выбран k2 = 1.
График зависимости I2(kос)
приведен на рис. 8. Интегральная оценка
снизилась до 0,114 при
значении koc
= 35.
.
Вместо того, чтобы изменять эти два
коэффициента одновременно, зафиксируем
вначале kос и построим
график зависимости интегральной оценки
для ряда значений k2,
рассчитывая параметры звеньев при
помощи соотношений (1) и (2). В качестве
начального значения был взят kос
= 30. Как видно из рис. 7, минимум интегральной
оценки, равный 0,125, был получен при
значении k2 = 1. Затем
в качестве фиксированного параметра
был выбран k2 = 1.
График зависимости I2(kос)
приведен на рис. 8. Интегральная оценка
снизилась до 0,114 при
значении koc
= 35.
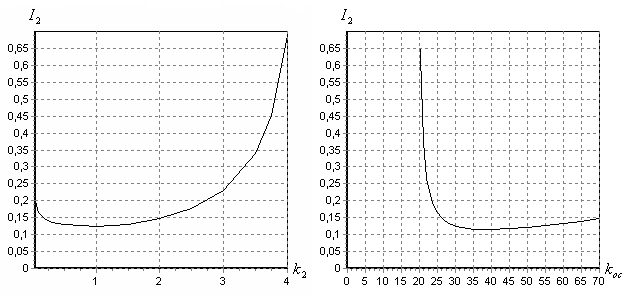
Рис. 7. Зависимость I2(k2) Рис. 8. Зависимость I2(kос)
Итак, минимальную интегральную оценку обеспечивают значения коэффициентов k2 = 1, kос = 35. График переходного процесса при данных значениях параметров представлен на рис. 9.

Рис. 9. График переходного процесса