-
Формулировка теоремы о кинетическом моменте и основные свойства гироскопа.
Формулировка теоремы о кинетическом моменте.
Теорема о кинетическом моменте имеет важное значение в теории гироскопов. С ее помощью доказываются основные свойства гироскопа, которые были рассмотрены ранее лишь со стороны их внешнего проявления.
Докажем теорему о кинетическом моменте, имея в виду произвольное твердое тело, у которого точка О неподвижна (рис. 1.4).

Выделим в теле материальную точку A, имеющую массу тi. Положение точки A вполне определяется радиусом-вектором ri. Предположим, что на тело в указанной точке А действует внешняя сила fi. Момент li этой силы относительно неподвижной точки О определяется следующим векторным произведением:
 .
.
Значение момента силы

Под действием силы тело приходит во вращение и каждая материальная точка тела, в том числе A, приобретает линейную скорость vi.
Как известно, произведение массы материальной точки на ее линейную скорость называется количеством движения материальной точки qi. Тогда

Вектор
 имеет то же направление, что и вектор
линейной скорости
имеет то же направление, что и вектор
линейной скорости
 .
Точно так же, как выше
был определен момент силы fi
относительно точки
О, можно определить момент любого другого
вектора, в том числе
.
Точно так же, как выше
был определен момент силы fi
относительно точки
О, можно определить момент любого другого
вектора, в том числе
 .
Этот момент называется
моментом количества движения
hi
материальной точки массой
.
Этот момент называется
моментом количества движения
hi
материальной точки массой
 относительно точки О:
относительно точки О:

Найдем
первую производную по времени от вектора
момента количества движения


Поскольку
первая производная от радиус-вектора
по времени и есть вектор скорости его
конца, т.е.
 ,
векторное произведение
,
векторное произведение
 как произведение коллинеарных векторов
(синус угла между ними равен нулю).
как произведение коллинеарных векторов
(синус угла между ними равен нулю).
В соответствии с формулировкой второго закона Ньютона:

Подставим данное значение в формулу:

Поскольку
правая часть этого равенства есть момент
силы относительно точки О, то
 .
.
Рассматривая твердое тело как совокупность n материальных точек и считая, что на тело действует к внешних сил, суммируя, можем записать

Выражение
 обозначим H.
Новый вектор H
— это момент количества движения тела
относительно точки О или, применяя более
часто употребляющийся термин, кинетический
момент.
обозначим H.
Новый вектор H
— это момент количества движения тела
относительно точки О или, применяя более
часто употребляющийся термин, кинетический
момент.
Выражение
 обозначим
L.
Вектор
L
— это главный момент внешних сил,
действующих на тело относительно точки
О.
обозначим
L.
Вектор
L
— это главный момент внешних сил,
действующих на тело относительно точки
О.
С учетом сказанного выражение (1.4) примет следующий вид:

Полученная формула (1.5) выражает основную теорему динамики твердого тела (теорему о кинетическом моменте): первая производная по времени от вектора кинетического момента тела равна вектору главного момента всех внешних сил. действующих на тело.
Производную
от кинетического момента нужно понимать
в векторном смысле: Тогда производная
 есть
скорость U
конца вектора H,
т.е.
есть
скорость U
конца вектора H,
т.е.
 .
.
Сопоставляя выражения получим: U = L.
Отсюда теорема о кинетическом моменте может быть сформулирована следующим образом: вектор линейной скорости конца вектора кинетического момента твердого тела относительно некоторой точки равен вектору главного момента всех сил, действующих на тело относительно той же точки. Эта формулировка известна под названием теоремы Резаля.
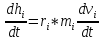
Рассмотрим подробнее, что представляет собой кинетический момент H применительно к гироскопу.
Выделим
в гироскопе, ротор которого имеет угловую
скорость Q собственного вращения, точку
A (рис. 1.5). Момент количества движения
точки
A относительно точки
О центра подвеса гироскопа
 .
В данном случае
.
В данном случае
 .
Исходя из
соотношения
.
Исходя из
соотношения
 ,
получим
,
получим
 .
При
суммировании по всем точкам ротора
гироскопа найдем
.
При
суммировании по всем точкам ротора
гироскопа найдем

Однако
 есть не что иное как
момент инерции
есть не что иное как
момент инерции
 ротора гироскопа относительно оси X
.Окончательно получим
ротора гироскопа относительно оси X
.Окончательно получим

Таким образом, собственный кинетический момент гироскопа равен произведению осевого момента инерции ротора гироскопа на его собственную угловую скорость.
Направление вектора кинетического момента Н совпадает с направлением вектора угловой скорости Ω.
Предположим,
что в то время, когда гироскоп вращается
вокруг своей главной оси X с угловой
скоростью
 ,
эта ось не остается неподвижной, а
изменяет направление в пространстве,
вращаясь вокруг точки
О.
Как в этом случае определить кинетический
момент гироскопа относительно
неподвижной точки О?
,
эта ось не остается неподвижной, а
изменяет направление в пространстве,
вращаясь вокруг точки
О.
Как в этом случае определить кинетический
момент гироскопа относительно
неподвижной точки О?
Очевидно,
что его значение не равно
 ,
а
направление не совпадает с направлением
оси X, поскольку суммарный вектор
кинетического момента является
результирующим двух составляющих
векторов кинетических моментов. Однако,
если гироскоп вращается вокруг оси X с
большой угловой скоростью между тем
как ось X изменяет свое
,
а
направление не совпадает с направлением
оси X, поскольку суммарный вектор
кинетического момента является
результирующим двух составляющих
векторов кинетических моментов. Однако,
если гироскоп вращается вокруг оси X с
большой угловой скоростью между тем
как ось X изменяет свое
направление
в пространств с сравнительно медленно,
при вычислении кинетического момента
можно пренебречь движением оси X. В этом
случае значение кинетического момента
Н выражается формулой
 ,
а направление вектора Н совпадает с
направлением оси X.
,
а направление вектора Н совпадает с
направлением оси X.
Кинетический момент Н гироскопа является наиболее полной характеристикой вращающегося тела, поскольку ни масса тела, ни его момент инерции, ни угловая скорость его вращения по отдельности не отражают его гироскопических свойств.
Основные свойства гироскопа.
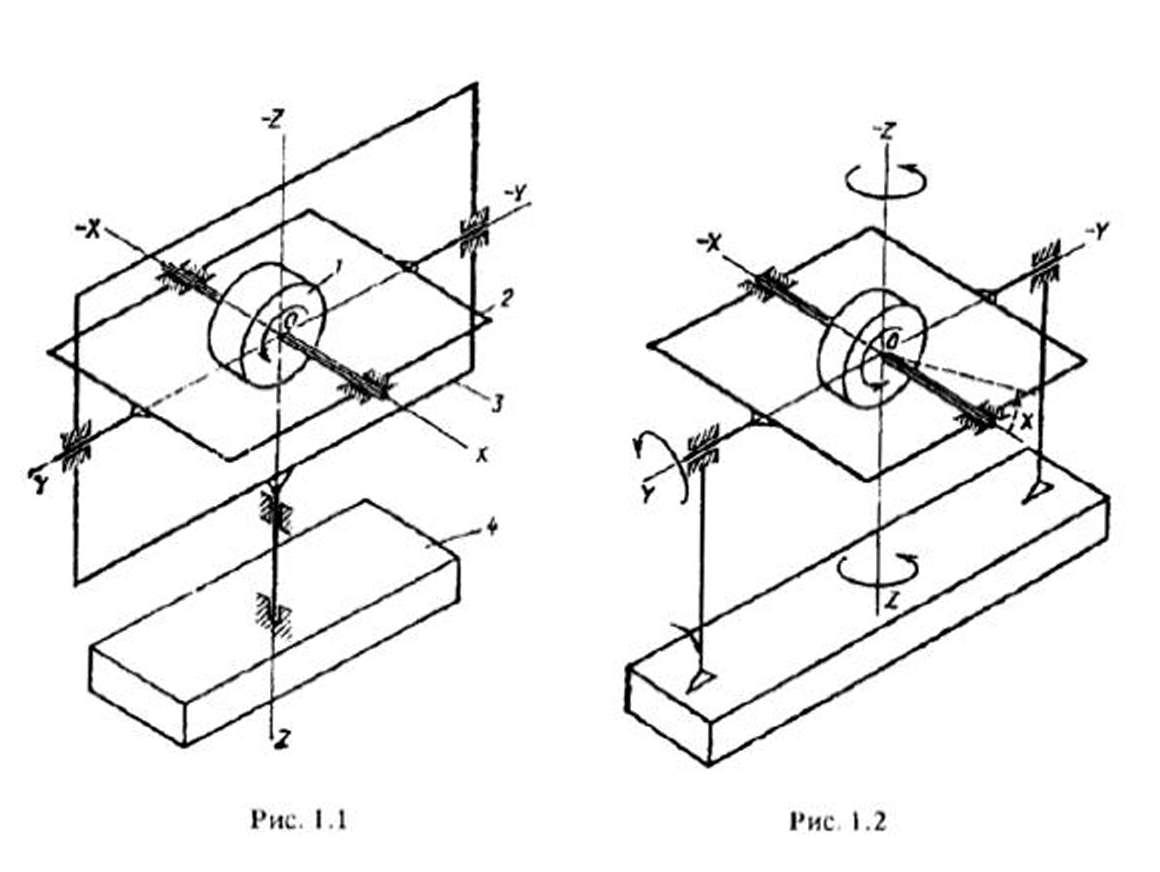
Свойство гироскопа с 3-мя степенями свободы. (Рис. 1.1).
Первое свойство заключается в следующем. Главная ось свободного гироскопа стремится удержать неизменным свое направление в инерциальном пространстве. Это означает, что если главная ось направлена на какую-либо звезду, то при любых перемещениях основания, на котором установлен гироскоп, она будет неизменно указывать на эту звезду, изменяя свою ориентацию по отношению к системе координат, связанной с Землей. Впервые указанное свойство было использовано Л. Фуко для доказательства суточного вращения Земли.
Второе свойство состоит в том, что под действием внешней силы, приложенной к внутреннему или внешнему кольцу и создающей момент, не совпадающий по направлению с главной осью гироскопа, последняя будет двигаться не по направлению действия силы (как это было бы при невращающемся роторе), а перпендикулярно этому направлению. Подобное свойство гироскопа называется прецессией. Прецессионное движение происходит с постоянной угловой скоростью, т.е. является безынерционным.
Третье свойство выражается в следующем. Под действием импульса силы (удара) главная ось гироскопа практически не изменяет первоначального направления, а лишь совершает быстрые колебания около положения равновесия.
Свойство гироскопа с 2-мя степенями свободы. (Рис. 1.2).
Гироскоп с двумя степенями свободы не обладает ни одним из тех свойств, которые имеет гироскоп с тремя степенями свободы. Свойство, присущее только гироскопу с двумя степенями свободы, заключается в следующем. Если придать основанию, на котором установлен гироскоп, вращение вокруг оси Z — Z, т. е. оси, не совпадающей с осью собственного вращения ротора и осью подвеса Y— Y, то ротор вместе с кольцом подвеса поворачивается вокруг оси подвеса до тех пор, пока ось X — X собственного вращения ротора не совпадет с осью вращения основания, т. е. с осью Z — Z вынужденного вращения гироскопа.
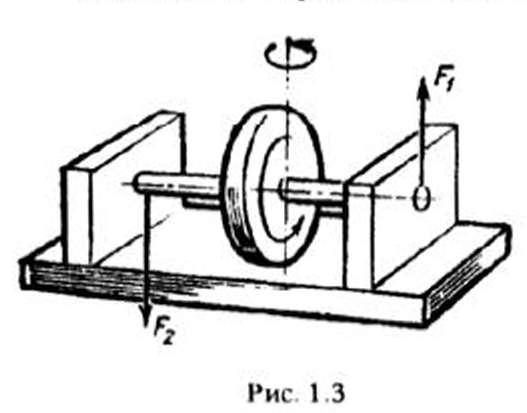
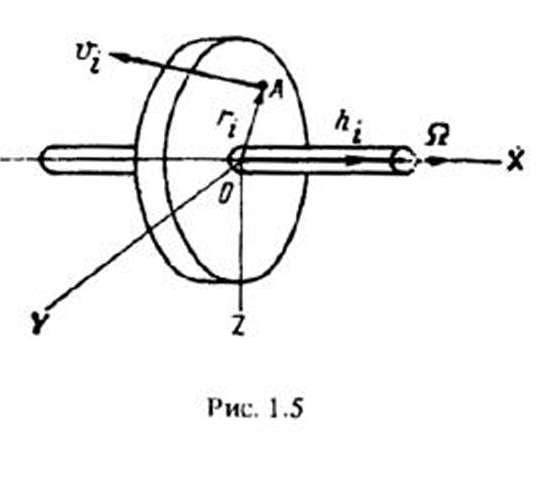
Свойство гироскопа с одной степенью свободы.
Пока основание, на котором установлено тело, обладающее собственным вращением, неподвижно, никаких гироскопических свойств тело не имеет. Они возникают в том случае, если вращение основания вызовет вынужденное вращение тела вокруг оси, не совпадающей с осью его собственного вращения. В соответствии со свойством гироскопа с двумя степенями свободы ось собственного вращения тела при этом стремится совпасть с осью вынужденного вращения. Этому движению препятствуют опоры (подшипники) главной оси. Действие ротора на опоры выражается в виде приложения к ним сил и F2 (рис. 1.З.), которые получили название гироскопических сил.