

-
Принцип действия корреляционного лага. Состав отображаемой информации.
Принцип действия корреляционного лага основан на измерении времени, затрачиваемого судном на прохождение некоторого участка пути, длина которого определяется расстоянием между вибраторами гидроакустической антенны лага и принятым алгоритмом обработки информации.
Сущность процесса определения скорости можно понять, рассмотрев следующую упрощенную схему. Предположим, что на судне вдоль диаметральной плоскости
размещены две гидроакустические антенны A1 и A2.

(рис. 2.17) на расстоянии l друг от друга. В режиме излучения эти антенны совместно с передающим устройством (ПУ) формируют импульсы, которые распространяются в сторону дна, отражаются от него и возвращаются обратно. Принимаемые антеннами сигналы будут зависеть от отражающей способности грунта, рельефа дна, от параметров среды их распространения и представлять собой некоторые случайные процессы U1(t) и U2(t), изменяющиеся во времени (рис. 2.18). В связи с тем, что при отсутствии дрейфа судна антенна А2 проходит над теми же участками дна, что и антенна ΔL процессы U1(t) и U2(t) будут аналогичны друг другу, но сдвинуты по времени на величину Тт, которая получила название транспортного запаздывания. Очевидно, величина транспортного запаздывания зависит от расстояния l между антеннами и скорости Сдвижения судна. В рассматриваемом случае будет иметь место следующее равенство:

Отсюда можно найти скорость V:

Учитывая,
что база l
известна, задача определения скорости
сводится к оценке значения транспортного
запаздывания
 .
.
Транспортное
запаздывание
 определяется путём искусственной
задержки
определяется путём искусственной
задержки
сигнала
первой антенны с помощью регулируемого
блока задержки
БЗ
(рис. 2.17), который осуществляет смещение
процесса
U1(t)
(рис. 2.18) вдоль оси времени. Для каждой
задержки
 ,
рассчитывается значение взаимной
корреляционной функции
,
рассчитывается значение взаимной
корреляционной функции
(ВКФ)
и эти значения сравниваются между собой.
Очевидно, что при
 =
=
 ,
смещение сигнала первой антенны
вдоль оси времени будет таким, что
процессы практически совпадут и
величина ВКФ будет максимальной. Учитывая
сказанное, каждый корреляционный лаг
должен включать в себя (рис. 2.17):
,
смещение сигнала первой антенны
вдоль оси времени будет таким, что
процессы практически совпадут и
величина ВКФ будет максимальной. Учитывая
сказанное, каждый корреляционный лаг
должен включать в себя (рис. 2.17):
-
антенную систему А;
-
передающее устройство ПУ
-
усилители - преобразователи УП для придания принятому сигналу вида, удобного для дальнейшей обработки;
-
регулируемый блок задержки Б3
-
коррелятор, состоящий из множительного устройства МУ и интегратора И
-
устройства сравнения УС значений корреляционных функций;
-
вычислитель В скорости, пути, пройденного судном и других величин;
-
устройства индикации УИ.
Передающий тракт.
Передающий тракт включает в себя передающее устройство и антенную систему. Основной задачей передающего устройства является формирование сигнала посылки с заданными параметрами. В корреляционных лагах обычно используется импульсный режим излучения. Формирование сигнала посылки осуществляется типовыми схемами, такими же, как и в других гидроакустических системах.
В качестве антенн используются пьезокерамические вибраторы направленного действия. Как правило, эти вибраторы устанавливаются в одном антенном блоке подобно тому, как это делается в доплеровских лагах. Отличаются антенны ориентацией плоскостей вибраторов. Если в доплеровских лагах плоскости вибраторов наклонены к оси антенного блока, то в данном случае они перпендикулярны этой оси с тем, чтобы создавалось вертикальное излучение.
Количество
вибраторов в антенном блоке определяется
тем конкретным кругом задач, которые
должен решать прибор. Для измерения
только продольной составляющей скорости
судна, как это было указано выше,
достаточно иметь в антенном блоке два
вибратора, ориентированных вдоль
диаметральной плоскости. Такую
антенную систему имела одна из первых
моделей SAL
- ACCOR
(Speed
Automatic
Log - Acoustic Correlation) корреляционного лага,
разработанного шведской фирмой «Jungner
Instrument» (рис.2.19). Система использовалась
как приемопередающая. В режиме передачи
оба вибратора 1 и 2 работали синфазно,
образуя излучение, фазовый центр которого
расположен ровно посредине между
фазовыми центрами
вибраторов. Оно эквивалентно излучению,
которое создавалось бы некоторой
условной передающей антенной
 ,
расположенной между антеннами
А1
и А2.
В режиме приема каждый вибратор
подключался к собственному приемному
каналу, передавая в него два аналогичных
случайных процесса, сдвинутых на величину
транспортного запаздывания.
,
расположенной между антеннами
А1
и А2.
В режиме приема каждый вибратор
подключался к собственному приемному
каналу, передавая в него два аналогичных
случайных процесса, сдвинутых на величину
транспортного запаздывания.

Максимум взаимно - корреляционной функции в рассматриваемом случае имеет место при смещении судна на расстояние, равное половине расстояния l между фазовыми центрами антенн. Действительно, как это следует из рис. 2.20, в позиции 1 по отношению к отражающим точкам 1,2и 3, расположенным на дне антенна А1 получает сигналы, отраженные от точек 1 и 2, а антенна A2 – от точек 2 и 3.

В связи с этим эхосигналы, принятые антеннами, будут различными. При перемещении антенн в позицию 2, отстоящую от предыдущей на величину 0,5l, сигнал, принятый антенной A2, будет аналогичен тому, который принимала антенна A1; в позиции 1, так как и отражающие точки и путь следования сигнала один и тот же. Следовательно, транспортное запаздывание в рассматриваемом случае определяется расстояние 0,5l.
Диаграмма направленности каждого вибратора достаточно широкая (~30°), что при расстоянии между вибраторами, равном 3 см. обеспечивает устойчивую работу прибора в процессе плавания. Частота излучаемого сигнала составляла 150 кГц, что позволяло лагу работать, используя отраженные от дна сигналы до глубин, примерно равных 200 м.
При необходимости получения большего объема или более точной информации о параметрах движения судна используются более сложные по составу антенные блоки и. как следствие, передающие устройства, вырабатывающие различные по характеристикам сигналы посылок.
Используя еще более сложные по своему составу антенные устройства, имеется возможность создания более точных измерителей скорости судна.
Преобразователи сигнала и корреляторы.
На практике могут встретиться различные алгоритмы вычисления корреляционных функций с помощью отличающихся по своей структуре корреляторов. В качестве примера на рис. 2.21 представлена одна из наиболее простых для реализации схем дискретного устройства для определения скорости судна. Принцип ее действия сводится к следующему. Принятые антеннами сигналы U1 (t) и U2 (t), могут быть представлены в виде суммы функций U1'(t) и U2'(t) - определяющих усреднённую форму импульса, и центрированных случайных процессов ΔU1(t) и ΔU2(t), являющихся отклонениями реальной формы импульсов от усреднённой:
U1(t) = U1'(t) + ΔU1(t), U2(t) = U2'(t) + ΔU2(t)
Первые слагаемые выражения используются для оценки глубины под килем судна, аналогично тому, как это делается в эхолотах. Для получения информации о скорости судна используются ΔU1(t) и ΔU2(t). Для этого в усилителях - преобразователях УП они заменяются знаковыми функциями SignΔU(t) (рис. 2.22).

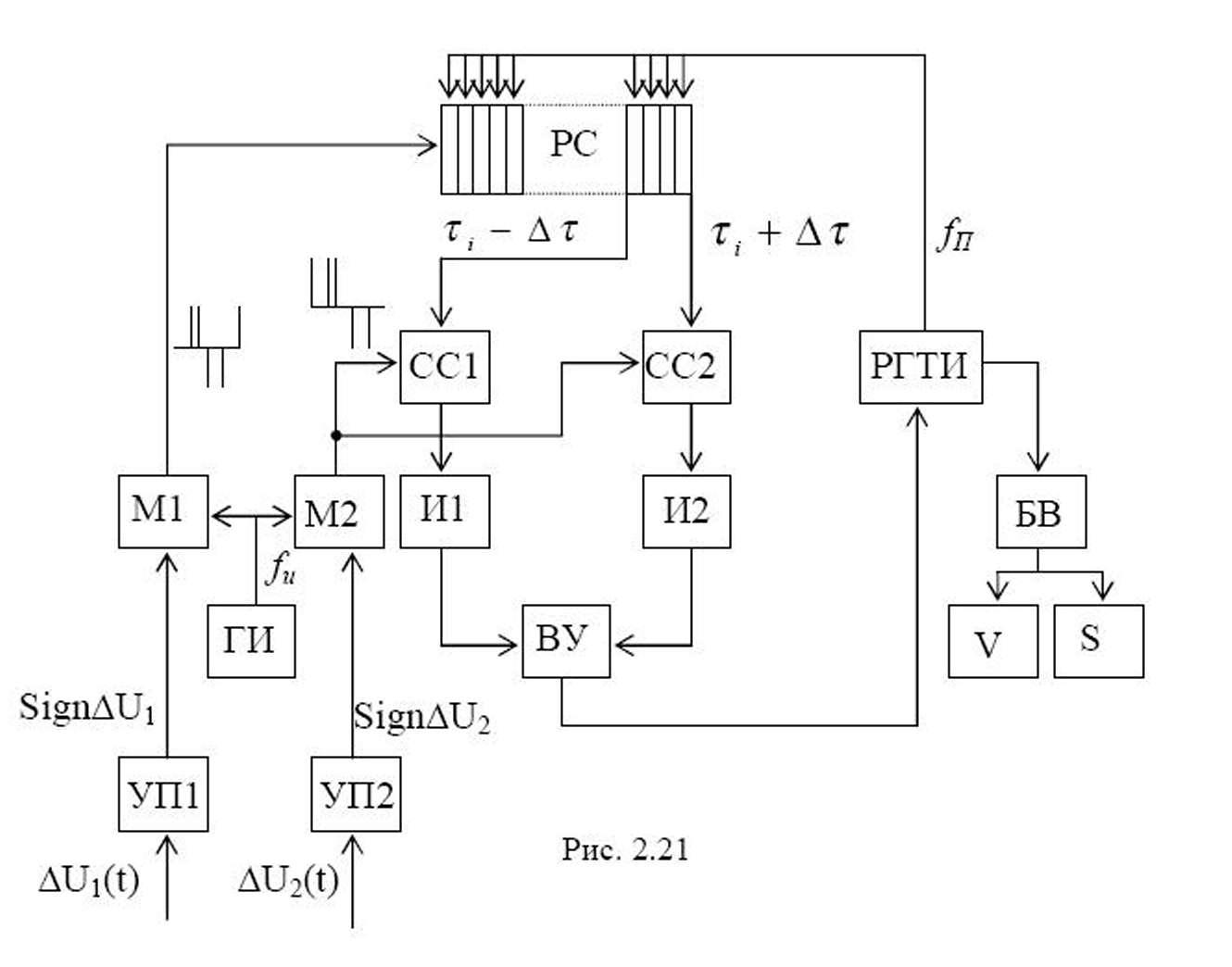
Для
измерения длительности положительных
и отрицательных значений этих функций
ими модулируется непрерывная
последовательность коротких импульсов,
поступающая от генератора импульсов
ГИ
с частотой
fu
и постоянной скважностью. Преобразованный
сигнал первой антенны подаётся в блок
задержки, представляющий собой
регистр сдвига
РГ.
управляемый импульсами, поступающими
с частотой fn
от регулируемого генератора тактовых
импульсов
РГТИ.
Время задержки сигнала определяется
количеством ячеек регистра сдвига и
скоростью продвижения по нему сигнала.
Последняя пропорциональна частоте
fn.
Регистр имеет два отвода. На первом
отводе задержка импульса равна
 ,
а на втором -
,
а на втором -
 .
Сигналы, снимаемые с этих выходов,
определяющие функции
.
Сигналы, снимаемые с этих выходов,
определяющие функции
 и
и ,
поступают на схемы совпадения СС1
и СС2,
соответственно.
,
поступают на схемы совпадения СС1
и СС2,
соответственно.

Сюда же подаётся клиппированный сигнал от второй антенны. Схема совпадения
вырабатывает на выходе счётный импульс только тогда, когда знаки импульсов, поступающих на её входы, одинаковы (рис. 2.22). Таким образом, эта схема выполняет функции множительного устройства коррелятора.
Сигналы от СС1 и СС2 поступают в интеграторы И1 и И2, роль которых выполняют счётчики импульсов. Количество посчитанных за определённый интервал времени Т импульсов будет определять значения корреляционных функций разнесенных по времени задержки на 2Δτ.


Импульсы,
подсчитанные интеграторами, поступают
в вычитающее устройство ВУ.
которое определяет разницу значений
корреляционных функций. Знак этой
разницы указывает на положение
максимума ВКФ относительно Г. (рис.
2.23). При
 больше
больше
 максимум находится справа от
максимум находится справа от
 ,
при обратном неравенстве - слева. Если
,
при обратном неравенстве - слева. Если
 =
= ,
то количество импульсов, поступающих
с
И1
и
И2.
равны и
,
то количество импульсов, поступающих
с
И1
и
И2.
равны и
 =
=
 .
Выходной сигнал
ВУ
управляет частотой
fn
и.
следовательно, скоростью продвижения
сигнала в регистре сдвига. В результате
fn
изменяется до тех пор, пока на выходе
ВУ сигнал
не станет равным нулю. Зная частоту
следования продвигающих импульсов
и. в результате, величину транспортного
запаздывания, в блоке
.
Выходной сигнал
ВУ
управляет частотой
fn
и.
следовательно, скоростью продвижения
сигнала в регистре сдвига. В результате
fn
изменяется до тех пор, пока на выходе
ВУ сигнал
не станет равным нулю. Зная частоту
следования продвигающих импульсов
и. в результате, величину транспортного
запаздывания, в блоке

вычисления БВ определяется скорость судна, а путём её интегрирования и пройденное расстояние. Аналогично описанному, по сигналам объёмной реверберации, возникающим за счёт отражения от промежуточных слоёв воды, может быть определена относительная скорость судна. Для её измерения, как это уже было указано, могут: использоваться специальные каналы и антенные устройства. Как правило, они имеют более высокую несущую частоту, что обеспечивает возможность получения отражённого сигнала только от слоёв воды, расположенных вблизи корпуса судна.
Использование
импульсного характера излучения
накладывает определенны ограничения
на возможность вычисления скорости в
рамках рассмотренного алгоритма.
Действительно, длительность реализации
случайных процессов
 и
и
 ограничена длительностью
τи
импульса посылки и, следовательно,
величина транспортного запаздывания
τm
может быть определена только в том
случае, если она не превышает τи.
В свою очередь, длительность импульса
на глубине
h
не
может превышать значения
2h/c.
В противном случае отраженный сигнал
вернется к антенне раньше, чем закончится
цикл излучения. Учитывая сказанное,
можно определить диапазон доступных
для оценки скоростей:
ограничена длительностью
τи
импульса посылки и, следовательно,
величина транспортного запаздывания
τm
может быть определена только в том
случае, если она не превышает τи.
В свою очередь, длительность импульса
на глубине
h
не
может превышать значения
2h/c.
В противном случае отраженный сигнал
вернется к антенне раньше, чем закончится
цикл излучения. Учитывая сказанное,
можно определить диапазон доступных
для оценки скоростей:

Д.ля обеспечения возможности измерения скорости независимо от условий плавания следует или использовать режим непрерывного излучения, или иные алгоритмы определения τm.
Дополнительные особенности возникают при движении судна с углом дрейфа. Они касаются как точности определения скорости судна, так и самой возможности сделать это.

Действительно, если считать, что судно движется с некоторым углом дрейфа β (рис. 2.24). то максимум ВКФ будет иметь место тогда, когда антенна А2 переместится в положение А2', максимально близкое к точке В. При этом, изменится как расчетная база антенн (отрезок А2А' не равен l/2),так и величина ВКФ.
В
рассматриваемых условиях измеренная
скорость судна
 будет равна:
будет равна:

Как следует, из выражения найденная скорость судна не соответствует ни истинной скорости v его движения, ни ее продольной составляющей Vx. Достаточно часто ее называют индицируемой или кажущейся скоростью.
Снижение значения ВКФ уменьшает вероятность качественной оценки транспортного запаздывания, однако при относительно небольших углах дрейфа, которые наиболее часто имеют место на практике, изменение коэффициента взаимной корреляции несущественно.