

2.3.2. Комбинированные сус.
Теория и практика летно-конструкторских испытаний показывают, что автономные системы управления при спуске пилотируемых КА с малым качеством не обеспечивают требуемую точность посадки. Одним из путей устранения отмеченного затруднения является применение комбинированной системы управления, которая состоит из автономной СУС на базе инерционной навигационной системы (ИНС) и СУС на базе ИНС, корректируемой по информации от навигационных ИСЗ.
В данной работе рассматривается вариант решения задачи точной посадки, когда с ИСЗ на борт передаются значения вектора состояния КА в текущий момент времени. До момента восстановления связи со спутником управление движением КА осуществляет простейшая автономная система. Преимущества выбранного варианта является возможность использования системы корректировки ИНС по информации от ИСЗ в целях обеспечения точной посадки КА различных типов.
2.3.3. Алгоритм наведения сус на конечном участке.
Известны три класса алгоритмов управления при спуске в атмосфере. Первый из них составляют алгоритмы, позволяющие отслеживать выбранную некоторым образом опорную траекторию, движение по которой обеспечивает приведение КА в заданный район посадки. В этом случае при выборе опорной траектории легко учитываются ограничения на перегрузку и тепловой нагрев, имеется возможность осуществлять оптимизацию траектории с точки зрения различных критериев. Использование управления относительно опорной траектории позволяет обеспечить заданные перегрузочный и тепловой режимы. Параметры опорной траектории выбираются перед спуском и задаются в СУС в виде набора констант. Однако решение задачи точной посадки предопределяет задание пространственной опорной траектории, отслеживание которой посредством изменения величины угла крена неэффективно.
К другому классу алгоритмов относятся терминальные алгоритмы управления, где значения управляющих параметров выбирается на основании прогнозирования отклонений конечной точки траектории от требуемой. При этом относительно просто обеспечивается возможность управления продольным и боковым конечными отклонениями, работа алгоритма е зависит от реализовавшихся значений параметров начальной точки траектории и малочувствительна к воздействию различного рода возмущающих факторов.
На участке восстановления связи с аппаратом целесообразно использовать терминальный алгоритм, который независимо от реализовавшихся при выходе из плазмы отклонений и действующих возмущений реализует точное приведение КА.
Допустим, что в моменты коррекции угла крена известны текущие параметры зоны достижимости (ЗД) КА. Тогда управление целесообразно строить таким образом, чтобы движение ЦЗД, имеющее место вследствие потери КА скорости и высоты, происходило всегда в направлении прицельной точки. После снижения КА до высоты окончания управлении ЗД окажется «стянутой» в прицельную точку.
Форма ЗД КА
скользящего типа по форме близка к
эллипсу (рис.2.3.), уравнение которого на
местной горизонтальной плоскости
включает 5 неизвестных параметров:
размеры большой и малой полуосей
 , координаты
центра
, координаты
центра в некоторой
связанной с прицельной точкой системе
координат и угол
в некоторой
связанной с прицельной точкой системе
координат и угол разворота
большой оси относительно выбранных
осей координат.
разворота
большой оси относительно выбранных
осей координат.











ПТ



ЦЗМ












Рис.2.3. Схема алгоритма управления.
Для определения
названных параметров необходимо знать
координаты 5-ти точек эллипса. Это может
быть достигнуто путем пятикратного
прогнозирования координат конечной
точки при движении на оставшейся части
траектории с различными постоянными
значениями угла крена
 . Однако в целях
уменьшения объема вычислений целесообразно
максимально уменьшать количество
прогнозов, что возможно при учете
физических особенностей задачи. Так, в
случае прогнозирования с
. Однако в целях
уменьшения объема вычислений целесообразно
максимально уменьшать количество
прогнозов, что возможно при учете
физических особенностей задачи. Так, в
случае прогнозирования с =180 конечная
точка траектории минимальной протяженности
принадлежит большой оси эллипса, причем
направление последней определяется
направлением горизонтальной проекции
вектора конечной скорости. По результатам
численного моделирования априори может
быть определена зависимость от текущих
параметров траектории величины
постоянного угла крена
=180 конечная
точка траектории минимальной протяженности
принадлежит большой оси эллипса, причем
направление последней определяется
направлением горизонтальной проекции
вектора конечной скорости. По результатам
численного моделирования априори может
быть определена зависимость от текущих
параметров траектории величины
постоянного угла крена , при котором
посадка КА происходит в точку, принадлежащую
малой оси эллипса. Прогнозирование
конечной точки при
, при котором
посадка КА происходит в точку, принадлежащую
малой оси эллипса. Прогнозирование
конечной точки при даст координаты
одной из точек малой оси эллипса. Решив
систему уравнений большой и малой осей
можно определить координаты
даст координаты
одной из точек малой оси эллипса. Решив
систему уравнений большой и малой осей
можно определить координаты цента эллипса.
Расстояние между центром и ранее
найденными двумя точками равны длинам
полуосей эллипса. Таким образом, все
параметры ЗД могут быть определены по
результатам двукратного расчета
координат конечной точки траектории.
цента эллипса.
Расстояние между центром и ранее
найденными двумя точками равны длинам
полуосей эллипса. Таким образом, все
параметры ЗД могут быть определены по
результатам двукратного расчета
координат конечной точки траектории.
Обеспечение
заданного перегрузочного режима может
осуществляться следующим образом. При
прогнозе конечной точки траектории с
 определяется
величина максимально возможной для
текущих начальных условий перегрузки
определяется
величина максимально возможной для
текущих начальных условий перегрузки . Прогноз с
. Прогноз с также дает
некоторую величину максимальной
перегрузки
также дает
некоторую величину максимальной
перегрузки . Следовательно,
на каждом шаге управления методом
интерполяции может быть вычислена
предельно-допустимая величина угла
крена
. Следовательно,
на каждом шаге управления методом
интерполяции может быть вычислена
предельно-допустимая величина угла
крена , при
, при
которой значение
перегрузки на оставшейся части траектории
не превышает заданного значения

Минимизация количества перекладок КА по крену в настоящей работе проводится путем сохранения прежнего значения угла крена при выполнении некоторых условий. Так, в случае незначительного уменьшения прогнозируемого промаха на текущем шаге управления по сравнению с предыдущим перекладка нецелесообразна. Смену угла крена необходимо отменять и в том случае, когда расчетный центр зоны достижимости близок к прицельной точке, и на выбор угла крена могут существенно влиять ошибки прогноза.
Использование представленного алгоритма наведения уменьшает зону рассеивания точек посадки КА скользящего типа до 1 км (рис.2.4), что позволяет говорить об обеспечении безопасной посадки на территории России.
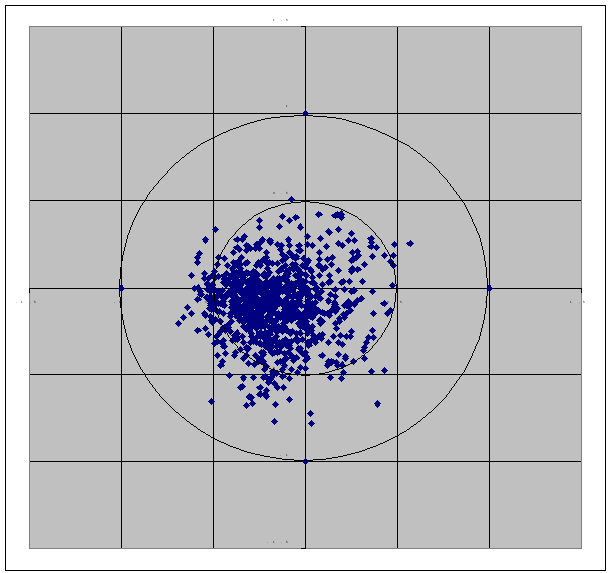
Рис.2.4. Размеры района рассеивания при использовании терминального АУ