

Между векторным и координатным способами движения точки существует взаимосвязь, которая заключается в следующем. Зная координаты точки М как функции времени, можно найти радиус вектор точки как функцию времени:
r |
r |
r |
r |
(5) |
r |
( t) = ix(t) + jy(t) +kz(t). |
|||
Естественный способ задания движения точки. Этот способ задания движения может быть применен, если заранее известна траектория движущейся точки. На траектории выбирают неподвижную точку О, которую принимают за начало отсчета криволинейной (дуговой) координаты s, и устанавливают её положительное и отрицательное направления отсчета, рис. 4.
11

Рис. 4
Положение точки в любой момент времени определяется зависимостью
s = f (t). |
(6) |
12

2. Скорость точки при векторном способе задания её движения
Величина, характеризующая быстроту и направление движения точки называется скоростью точки.
Рассмотрим точку М, которая совершает произвольное движение в пространстве, рис. 5. В момент времени t1 точка
занимает положение М1 и имеет радиус-вектор r1, в момент времени t2 – положение М2 и имеет радиус-вектор r2.
Рис. 5 |
13 |

Рис. 5
Приращение радиус-вектора точки за время Dt =t2 - t1 равно Dr =r2 - r1
14

Рис. 5
Отношение приращения радиус-вектора точки к соответ- ствующему этому приращению промежутку времени равно вектору, который называется средней по модулю и направлению скоростью точки за промежуток времени
r |
Dr |
|
vср = Dt . |
(7) |
|
|
|
15 |
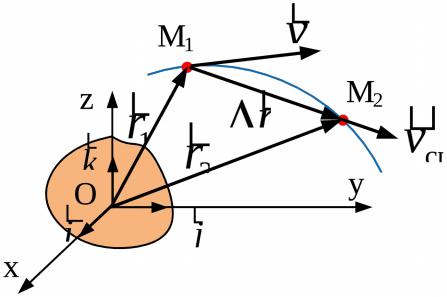
Рис. 5
Направлен вектор средней скорости точки так же, как вектор r.
Скорость точки в данный момент равна пределу, к которому стремится средняя скорость точки при стремлении промежутка времени t к нулю.
r |
= lim |
Dr |
= |
dr |
. |
(8) |
v |
Dt |
dt |
||||
|
Dt®0 |
|
|
16 |

Рис. 5
При стремленииDt к нулю вектор средней скорости поворачивается и в пределе совпадает с касательной траектории точки, рис. 5.
Таким образом, скорость точки в данный момент времени это вектор, равный первой производной по времени от радиус- вектора точки и направленный по касательной к траектории
точки: |
r |
= |
dr |
|
|
|
. |
(9) |
|||
|
v |
dt |
|||
|
|
|
|
17 |

3. Скорость точки при координатном способе задания её движения
Радиус- вектор точки равен: |
|
r ix jy kz. |
(10) |
Рис. 6
18

Найдём скорость точки, продифференцировав (5) по
времени:
vr drdt ir dxdt rj dydt kr dzdt .
Разложим вектор скорости точки по координатным осям.
v ivx jvy kvz . |
(12) |
||
Сравнивая коэффициенты, стоящие при одинаковых ортах, |
|||
получим: |
|
|
|
vx dx ; vy |
dy |
; vz dz . |
(13) |
dt |
dt |
dt |
|
Из (13) следует: проекции скорости точки на координатные оси равны первым производным по времени от соответствующих координат.
Модуль скорости точки равен:
v |
v |
2 |
v |
2 |
v |
2 |
. |
19 |
x |
y |
z |
(14) |
|||||
|
|
|
|
|
19 |

Направление скорости точки определяется направляющими
косинусами. |
v |
|
vy |
|
v |
|
|
|
cos |
x ; cos |
; cos |
z |
, |
(15) |
|||
|
v |
|
|
|||||
|
v |
|
v |
|
||||
где , , - углы, которые составляет вектор скорости с коор- динатными осями, соответственно x, y, z.
Рис. 7 |
20 |
20 |