

I. Общая задача лп
z – целевая функция
c= (c1, …,cn) – вектор целей
A= (aij)mxn– матрица задачи (матрица условий)
b= (b1, …,bm) – вектор ограничений (вектор правых условий)
x= (x1, …,xn) – план задачи (решение задачи)
Условие xj ≥ 0 – условие неотрицательности переменных
Множество x, удовлетворяющих всем ограничениям называется множеством допустимых решений, обозначаетсяX. План, на котором достигается оптимум целевой функции (минимум/максимум) называется решением задачи (оптимальный план), обозначаетсяx*.X*– множество решений задачи.
Решить общую задачу ЛП означает, найти хотя бы один оптимальный план и вычислить оптимальное значение.
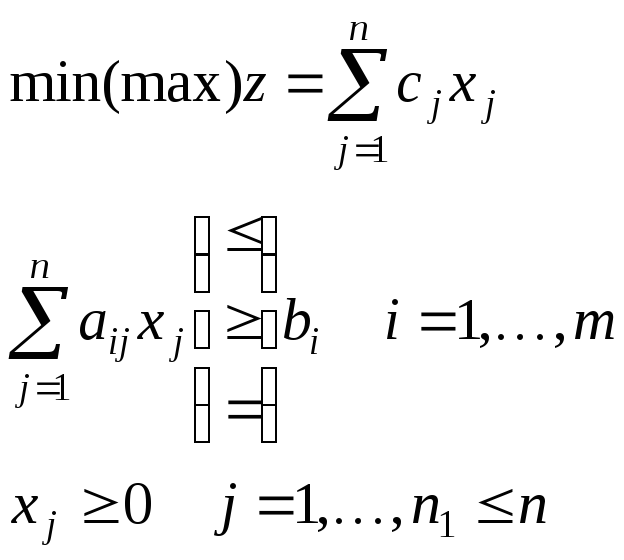
Частные задачи ЛП
|
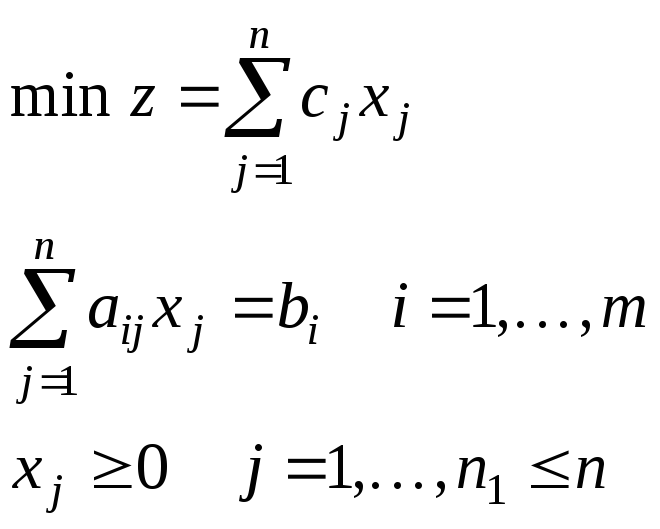
Скалярная форма |
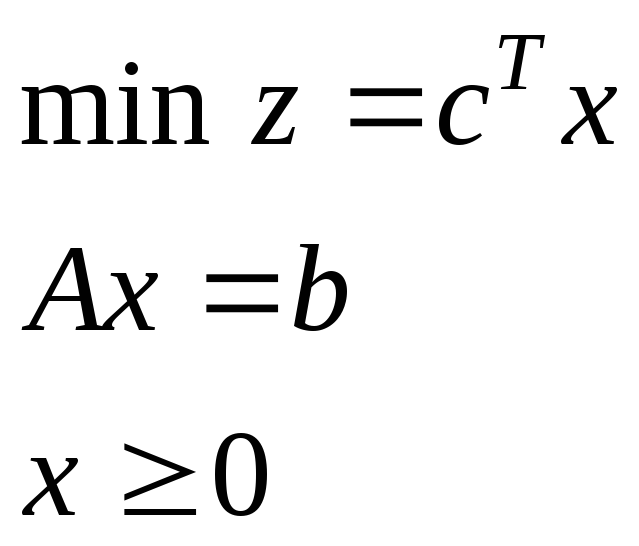
Матричная форма |
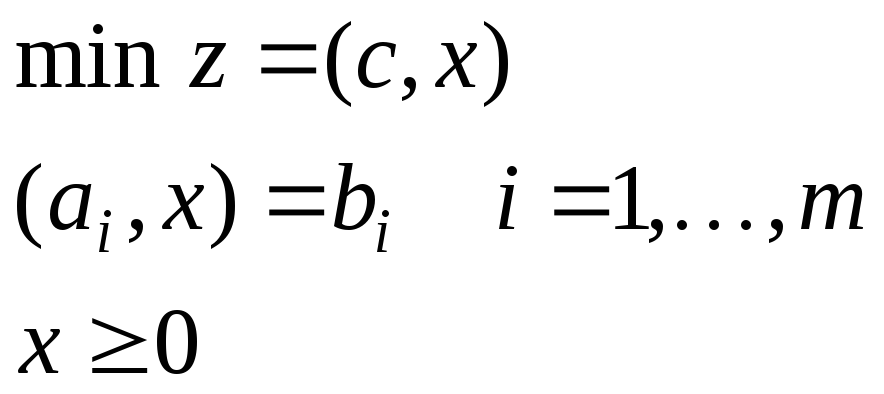
Векторная форма |
|
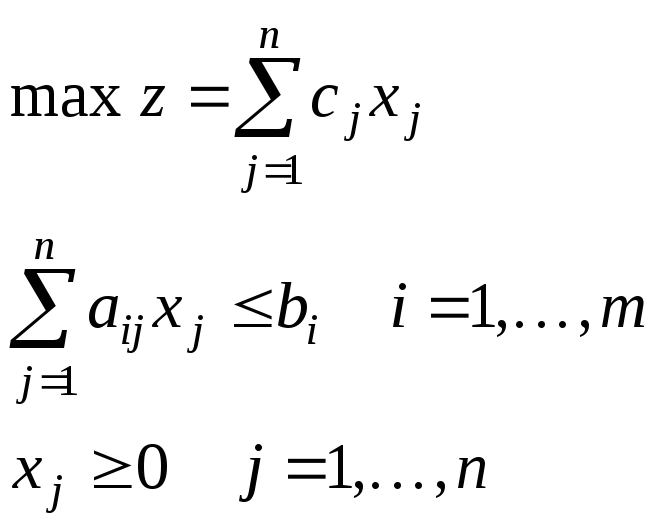
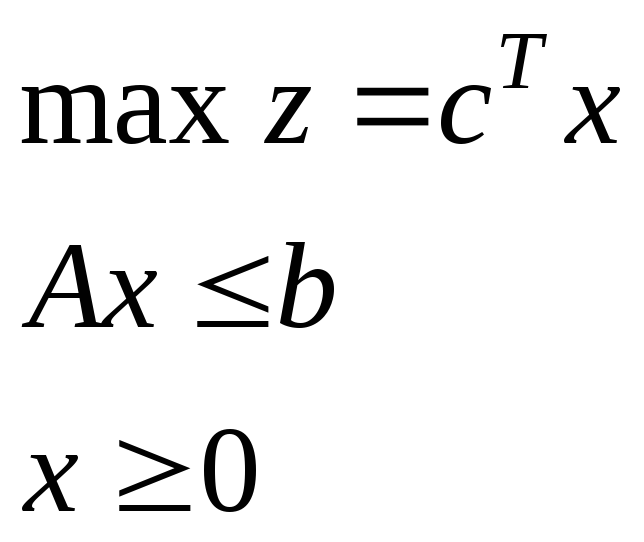
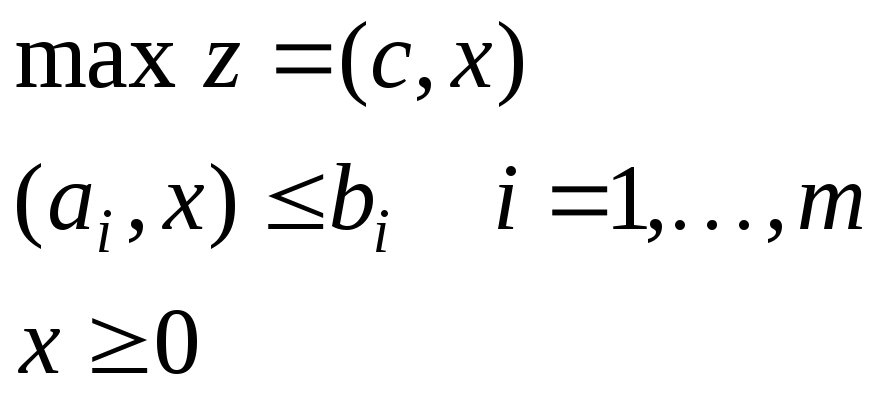
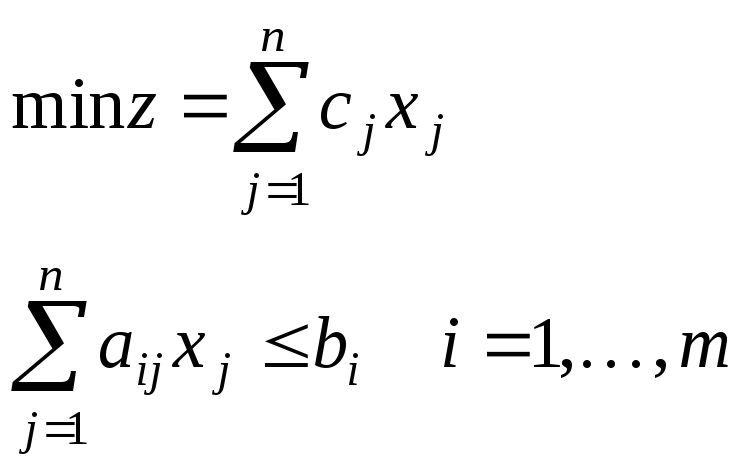
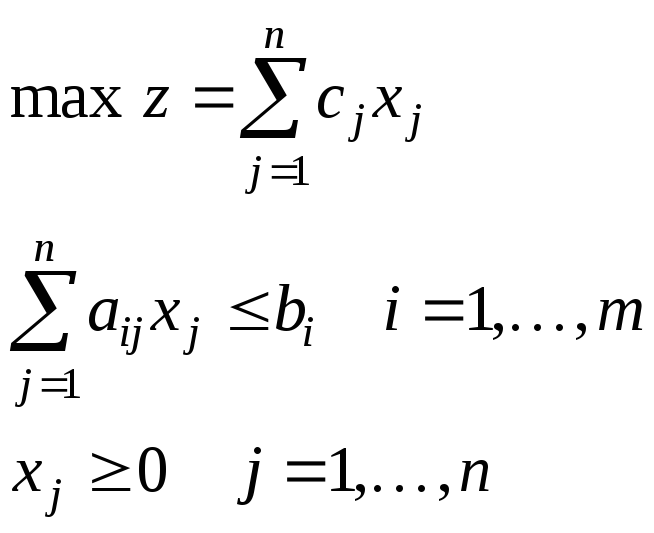
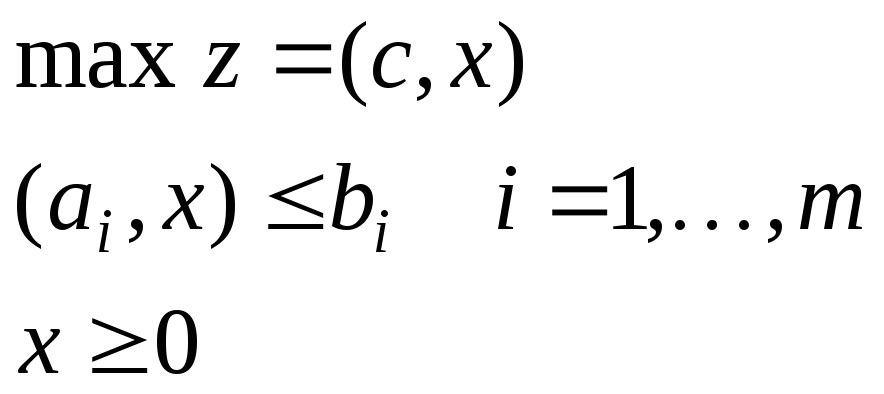
II. Стандартная задача ЛП (задача планирования производства) | ||
|
|
|
|
|
III. Каноническая задача ЛП (транспортная задача) | ||
|
|
|
|
|
IV. Основная задача ЛП | ||
|
|
|
|
Все виды задач ЛП эквивалентны: существуют однозначные правила перехода от одного вида задачи к другому и решая последнюю задачу и вспоминая правила перехода, мы можем написать решение исходной задачи, не решая ее.
Правила перехода
xn+i– дополнительные переменные, (насколько недоиспользовано ограничение)


Пусть ai1 ≠ 0

Пусть

![]()
Пусть xj– свободная ~
 –
любую свободную переменную можно
представить в виде разности двух
неотрицательных переменных.
–
любую свободную переменную можно
представить в виде разности двух
неотрицательных переменных.
Г
 рафический
анализ линейных моделей.
рафический
анализ линейных моделей.
![]()
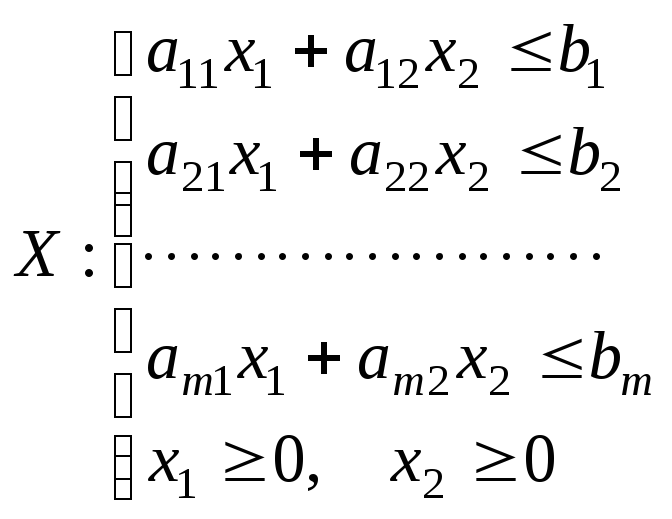
m = 3
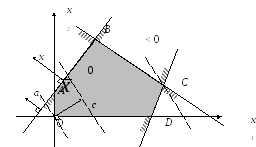
Строим границы множества решений, которые соответствуют неравенствам (прямые:
 )
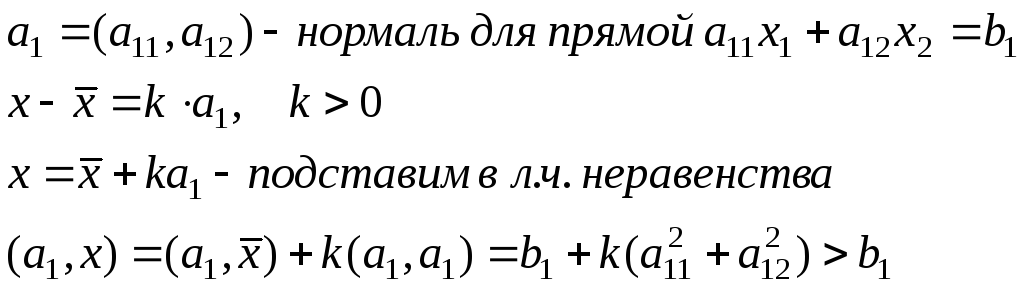
)Находим полуплоскости, соответствующие каждому ограничению (метод пробной точки)
Находим многоугольник допустимых решений, как пересечение найденных полуплоскостей. Полученную область заштриховать. Возможные варианты:
X– многоугольник
X –пустое множество
X –неограниченное многоугольное множество
Находим координаты вектора градиента целевой функции (вектор целей – вектор нормали к линиям уровня)
Строим прямую (перпендикулярно вектору цели), которая соответствует линии уровня для z0= 0.
![]()
Затем перемещаем прямую в направлении вектора цели (в случае задачи на min– в противоположном направлении) до тех пор, пока прямая имеет общие точки с множеством допустимых решений. Крайнее положение – ответ.
Вычисляем координаты крайней точки, как пересечение соответствующих прямых и вычисляем значение целевой функции в этой точке.
Ответ:
![]()
Двойственные модели ЛП, их экономическая интерпретация.
Рассмотрим задачу Lпланирования производства (1-ый вариант).
|
Скалярная форма |
Матричная форма |
Векторная форма |
|
|
|
|

mресурсов.
bi– объемi-го ресурсаnтехнологийаij– затратыi-го ресурса при использованииj-ой технологии в единицу времениcj– получаемая ценность при использованииj-ой технологии в единицу времени
xj– время работыj-ой технологии.
x= (x1, …,xn)
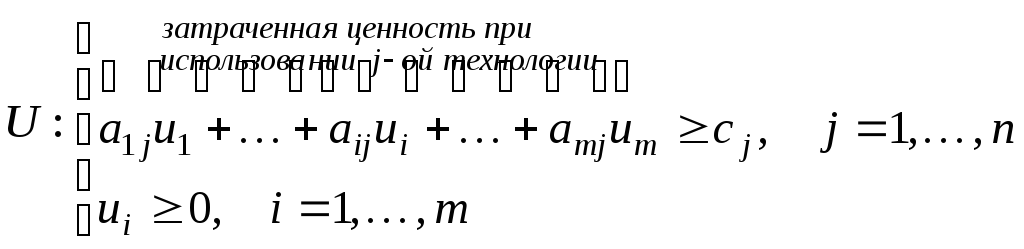
Оценим ценность затраченную и полученную в единицу времени
ui– ценность единицыi-го ресурса
|
Скалярная форма |
Матричная форма |
Векторная форма |
|
|
|
|
Δ – потери
x– план производства


L*– двойственная задача к задачеL
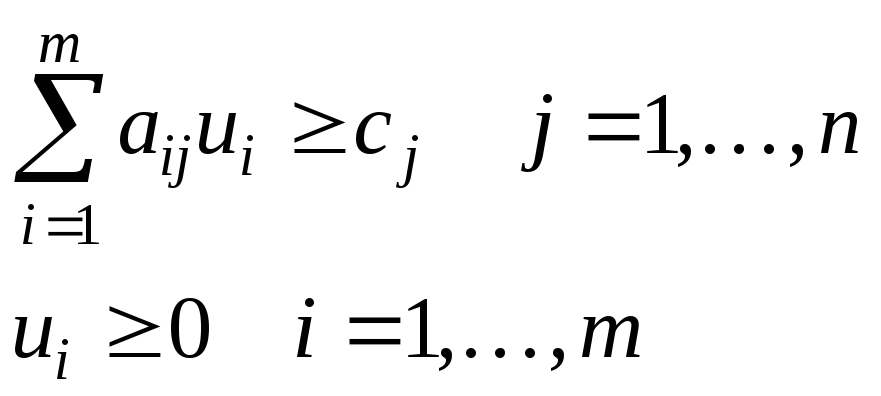
|
Скалярная форма |
Матричная форма |
Векторная форма |
|
|
|
|
Двойственная задача возникает как задача минимизации потерь ценности в производстве, при условии, что само производство функционирует оптимальным образом, то есть в соответствии с оптимальным планом задачи L.
Правила построения двойственных моделей.
|
|
L |
|
L* |
|
1. |
Задача на max |
|
Задача на min |
|
2. |
Матрица условий A |
|
Матрица условий AT |
|
3. |
m ограничений n переменных |
|
n ограничений m переменных |
|
4. |
с– вектор цели b– вектор ограничений |
|
b– вектор цели c– вектор ограничений |
|
5. |
Ограничение ≤ |
|
Ограничение ≥ |
|
6. |
x ≥ 0 |
|
y ≥ 0 |