

Лекция 5 Кинетостатический силовой расчет механизмов.
Задачей силового расчета является определение сил, действующих на звенья механизма и сил взаимодействия этих звеньев – то есть давлений в кинематических парах.
При силовом расчете преимущественно пользуются принципом Даламбера, известном из теоретической механике. Согласно этому принципу, если к звеньям механизма приложить активные силы и моменты пар сил, реакции связей, а также силы инерции и моменты пар сил инерции, то можно условно считать, что система сил находится в равновесии и к ней применимы уравнения статики. Этот принцип носит еще одно название – принцип кинетостатики.
Силы инерции в плоских механизмах.
Для использования принципа кинетостатики необходимо уметь определять направления и величины сил и моментов сил инерции звеньев. В общем случае, все силы инерции звена плоского механизма, совершающего плоскопараллельное движение и имеющего плоскость симметрии, параллельную оси движения, приводятся к главному вектору сил инерции Fи, приложенному в центре тяжести звена S и к главному моменту пары сил инерции Mи (рис..22).
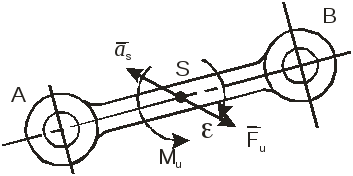
Рис. 22 Сила и момент инерции звена плоского механизма
Сила инерции Fи прикладывается к центру тяжести звена S и направлена в сторону, противоположную направлению полного ускорения точки S.
![]() (7)
(7)
|
где |
Fи |
– |
вектор сил инерции звена AB; |
|
m |
– |
масса звена, кг; | |
|
as |
– |
вектор полного ускорения центра тяжести звена, измеряемый, м/с2. |
Из формулы (7)
следует, что сила инерции имеет размерность
![]() ,
т.е. измеряется в Ньютонах. Момент пары
сил инерцииMи,
направлен в сторону, противоположную
направлению углового ускорения звена
εAB
и рассчитывается по формуле
,
т.е. измеряется в Ньютонах. Момент пары
сил инерцииMи,
направлен в сторону, противоположную
направлению углового ускорения звена
εAB
и рассчитывается по формуле
-
 ,
,где
Is
–
момент инерции звена относительно оси, проходящей через центр тяжести и перпендикулярной к плоскости движения звена, измеряемый, кг·м2;
ε
–
угловое ускорение звена, 1/с2.
Момент инерции Is однородного стержня длиной l и массой m равен
 .
.
Размерность момента
инерции
![]() или
или![]() ,
т.е.
,
т.е.![]() .
.
Отметим частные случаи движения звеньев плоского механизма.
Звено движется поступательно с некоторым ускорением (рис..23а).
|
а |
б |
в |
|
|
|
|
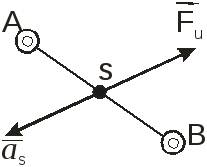
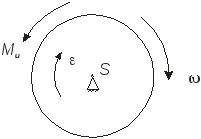
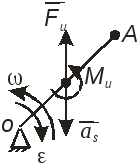
Рис. 23 Силы инерции и моменты пар инерции звеньев плоских механизмов
Так как угловое ускорение ε звена рано нулю, то момент пар сил инерции также равен нулю и все силы инерции сведутся к одной результирующей силе Fи, приложенной в центре тяжести S звена и направленной противоположно ускорению.
![]() .
.
Звено вращается вокруг оси, проходящей через его центр тяжести S (рис..23б).
Поскольку ускорение центра тяжести равно нулю, сила инерции Fи также равна нулю. Если угловое ускорение ε звена не равна нулю, то силы инерции приводятся к паре с моментом Mи, равным
![]() .
.
При равномерном вращении (ω=const) сила инерции Fи и момент пар сил инерции Mи равны нулю.
Звено вращается вокруг оси O, не проходящей через центр тяжести (рис..23б).
Силы инерции сводятся к приложенной в центре тяжести S силе Fи, направленной противоположно полному ускорению as и к паре сил инерции с моментом Mи.
![]() (8)
(8)
-
 ,
,где
Is
–
момент инерции звена относительно оси, проходящей через центр тяжести S.
Звено совершает сложное плоскопараллельное движение (рис..22).
В этом случае движение звена рассматривается как состоящее из переносного поступательного вместе с центром тяжести S и относительного вращательного вокруг центра тяжести S. Силы инерции приводятся к одной силе инерции Fи и одной паре сил Mи, которые определяются как в случае 3 в соответствии с уравнениями (8).